mdibl_overview
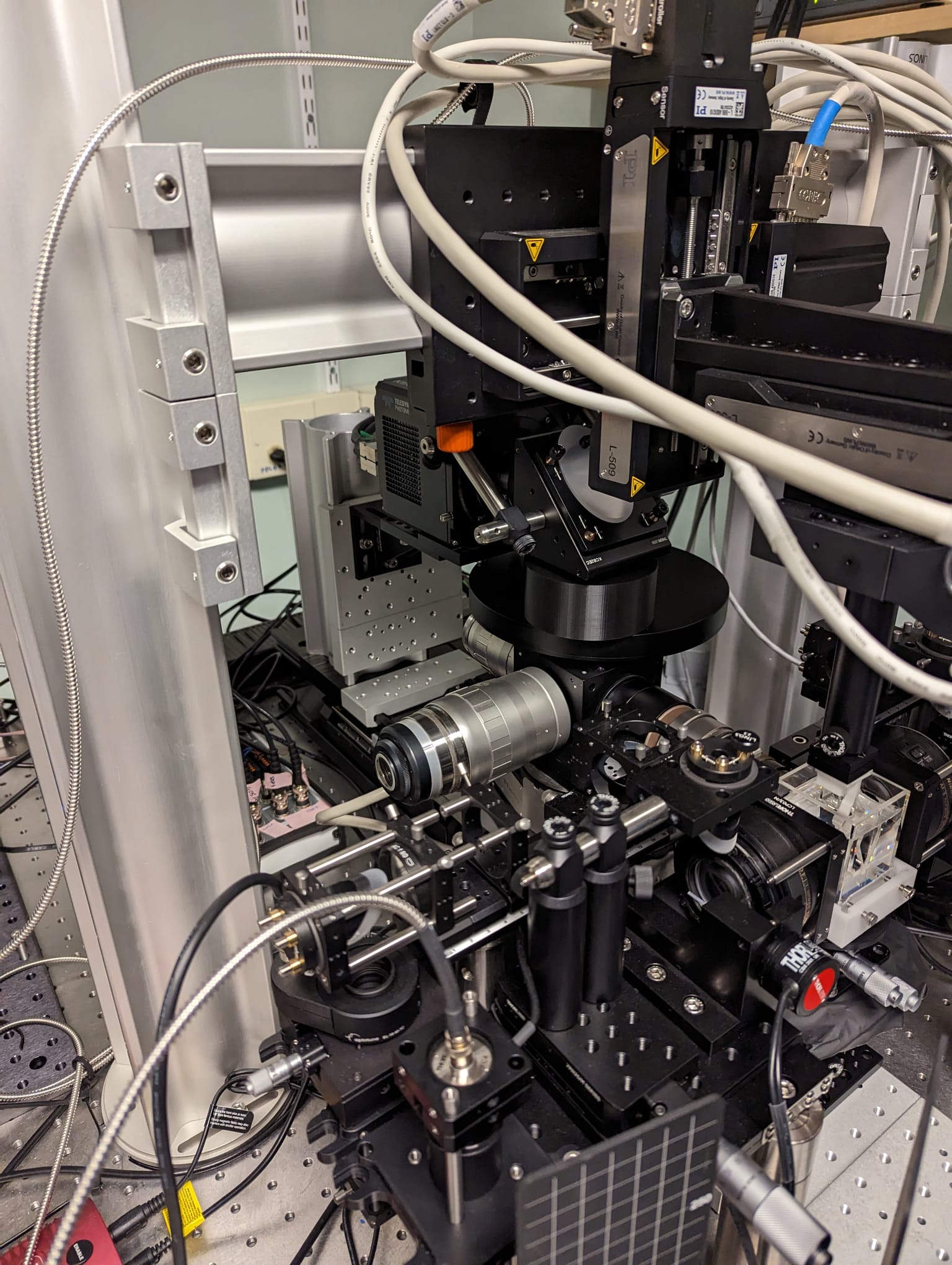
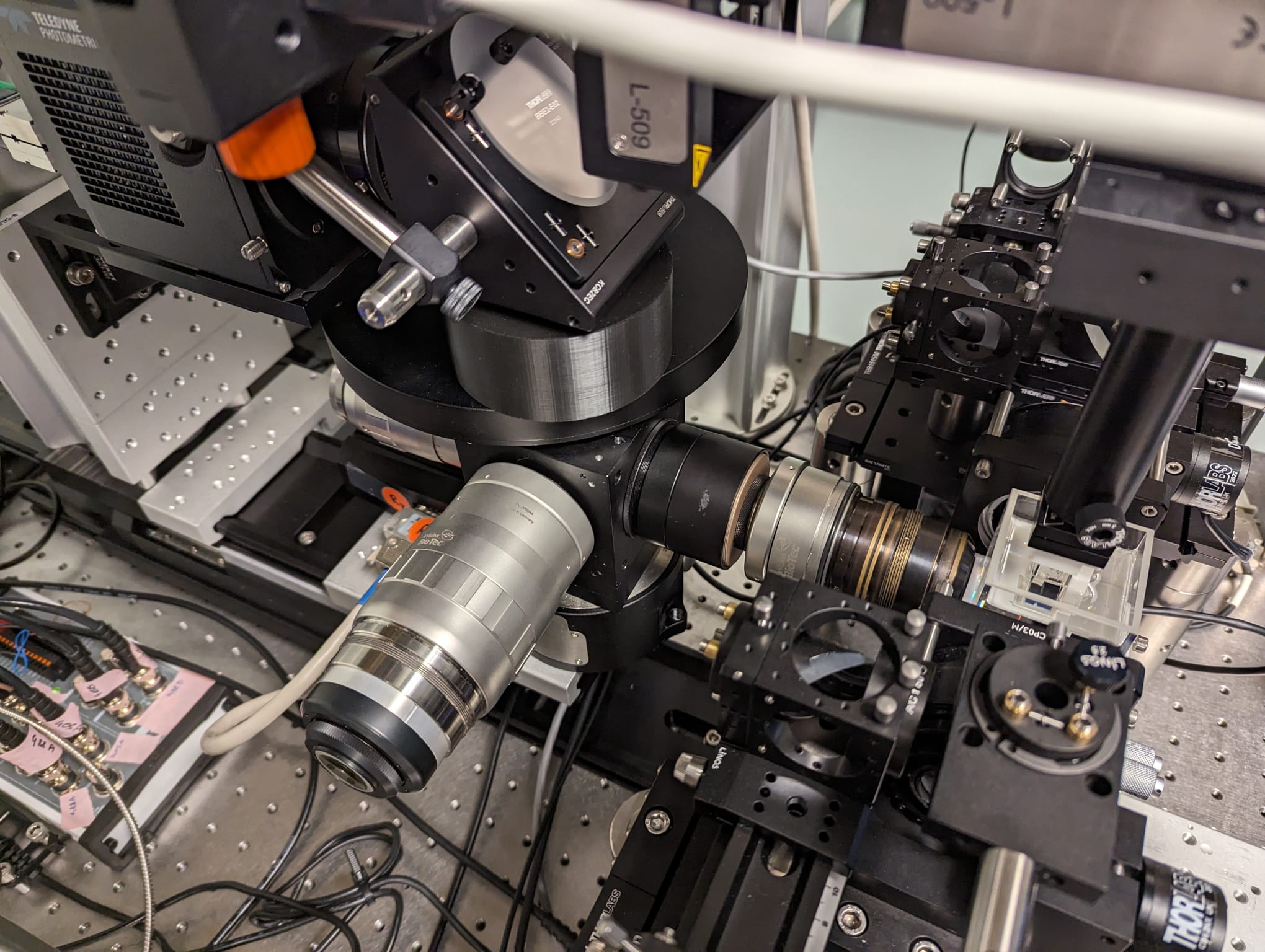
In mid-2023, the MDIBL mesoSPIM run by the Murawala lab was upgraded with a special detection path:
- An objective turret with a 1.1 x, 4x, and 12x Miltenyl Biotec objectives. Initial tests with an Hamamatsu Orca camera were promising which made us go ahead with the full modification of an existing mesoSPIM V5.
- ZWO 7 x 2" filter wheel
- Olympus SWTLU-C tube lens (sold by Edmund optics)
- Teledyne Photometrics Kinetix camera with 3200 x 3200 pixels
Using this mesoSPIM variant is similar to other mesoSPIM versions running mesoSPIM-control. However, there are some differences in day-to-day operation outlined in a wiki page.
- The Lavision objectives are specifically designed as dipping lenses for organic solvents. The way the correction collar on these objectives works is by moving a flat front window along the optical axis. This changes the ratio of optical path in air (between the window and internal lenses) and the optical path inside the medium to minimize spherical aberration.
- It is possible to use these dipping objectives after removing their dipping caps by replacing the flat window in the dipping cap with the cuvette wall of the immersion cuvette in a mesoSPIM
- To motorize this "correction collar", the cuvette wall of the immersion cuvette can be translated - this requires an additional linear stage to translate the cuvette ("cuvette stage")
- Especially the 4x and 12x objectives require different cuvette positions for optimium image quality as their working distances are different (approx 16 vs. 10 mm)
- as the Lavision objectives are huge (the 4x weighs around 1.7 kg), the objective turret is based on a heavy-duty rotation stage (PI L-611)
- because there are now 5+2 stages in the system, there have to be both the original PI C-884 stage controller and an additional PI C-863 controller controlling the objective turret stage
- the Kinetix camera has a bigger chip than the Hamamatsu Orca, leading to less tiles to cover a given sample at the same magnification
- because of these changes the microscope runs a forked version of mesoSPIM-control
- the XYZ stage assembly has to be raised to make room for the detection path (which is slightly higher than the mesoSPIM V5 version using the Olympus MVX-10 macroscope)
- from an alignment point of view the system is more sensitive as the maximal detection NA has increased (NA 0.5 with the 12x compared to a maximum of 0.25 with the MVX-10 detection path in a mesoSPIM V5)
⚠️ To switch between objectives, the focusing stage should move backward to a safe rotation position. Then, the objective turret should rotate automatically and the focusing stage moves back to focus position. The safe rotation position can be set in the config file.⚠️ Be aware that the cuvette stage moves when changing objectives.⚠️ In case referencing of the PI stages is necessary (e.g. after a power outage), make sure to first remove the sample, reference the 6 stages attached to the C-884 controller first, then use the M-406 focus stage to manually move the detection path to a position where the objective turret can be safely rotated, then reference the objective turret stage (attached to the C-863 controller)
- raising the excitation path