- Simple motion planning algorithms for single agent, crowd and flocks in known/unknown environments.
- The task for an agent is to reach its goal without colliding with obstacles or other agents.
- Problems solved until now are listed in demonstration section.
- Code is written in Java, should work with JRE 8+.
src/contains all source code.jars/contain all libraries bundled as jars.processingis used as a rendering library.queasy camis used as a camera library.
data/contains resources such as images, obj, mtl files.
- For most of the code, the documentation is itself.
- Open a terminal at project root (the directory containing this file).
- Use
javac -cp "jars/*" -d build/ $(find -name "*.java")to compile and put all output class files underbuild/. - Use
java -cp "build/:jars/*" <package>.<to>.<path>.<class>to run any simulation.- For example
java -cp "build/:jars/*" demos.WalkCycle.
- For example
- Common controls
w a s dfor basic camera movements.q efor camera up and down movements.pfor pause/play.
- Tested on Ubuntu 18.04
- If you use a distrubution that uses rolling release cycle (like Arch) you might have to install some older version of JRE and mesa (opensource intel openGL driver) that work with processing library.
The following color scheme is used in all videos.
| Syntax | Description |
|---|---|
| white sphere/line | agent |
| red sphere/line | agent in the future (useful to visualize how the path is smoothed) |
| green cube | goal |
| pink circle | obstacle |
| white point | sampled milestone |
| pink point | milestone inside obstacle |
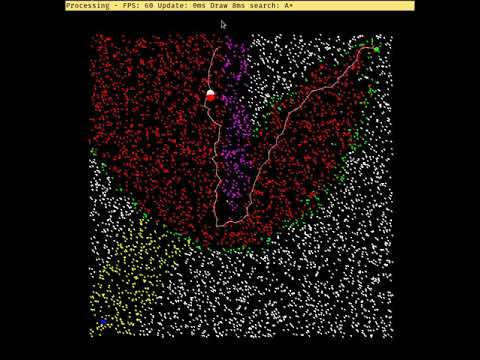
| green point | milestone on the fringe during search |
| red point | explored milestone during search |
- The title bar shows the state of the system at any instant (current search algorithm, path smoothing on/off ...).
- Most of the demos use path smoothing.
- The videos demos are compiled into a playlist.
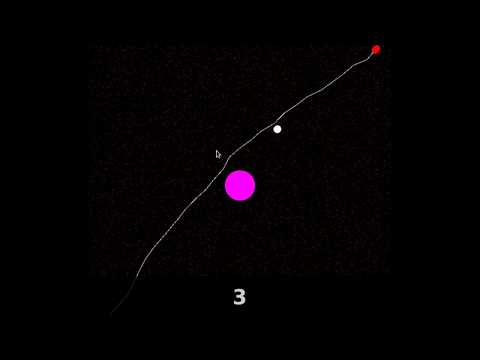
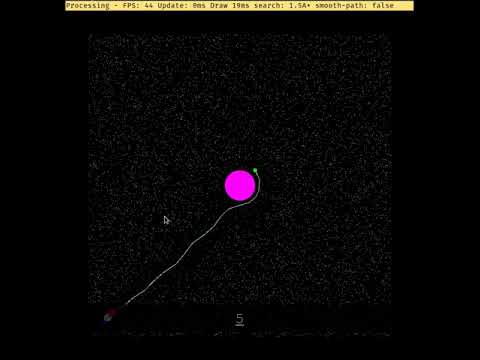
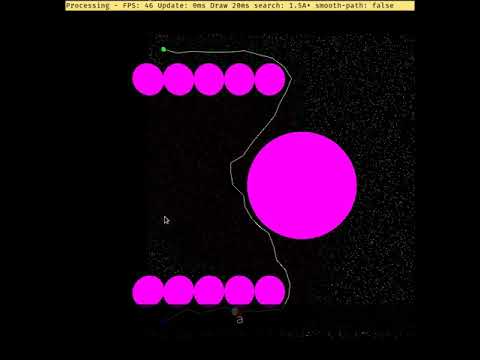
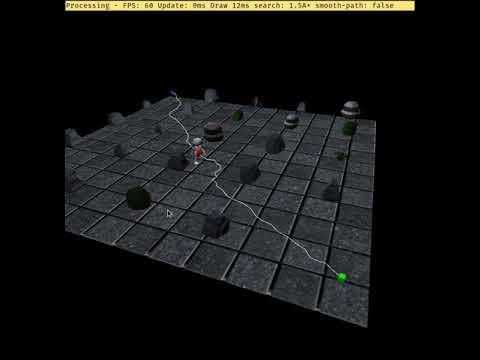
A circular agent is in a square room. Its goal is to reach the other diagonal. But there is an obstacle in the middle of the room.
| Algorithm | Image |
|---|---|
| DFS |  |
| BFS |  |
| UCS |  |
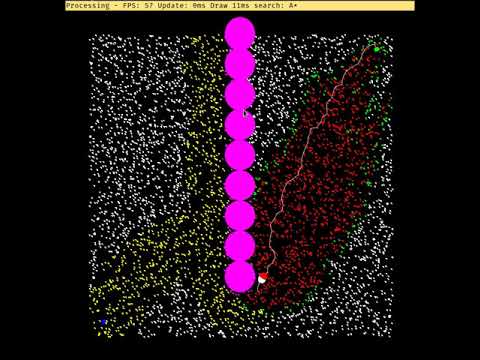
| A* |  |
| weighted A* (1.5) |  |
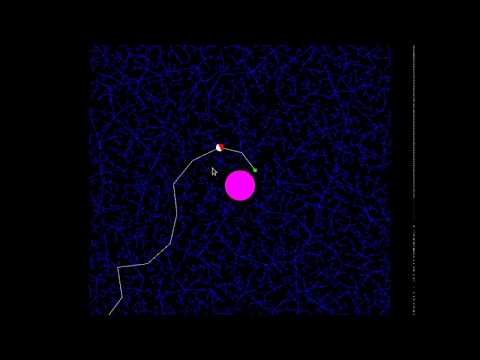
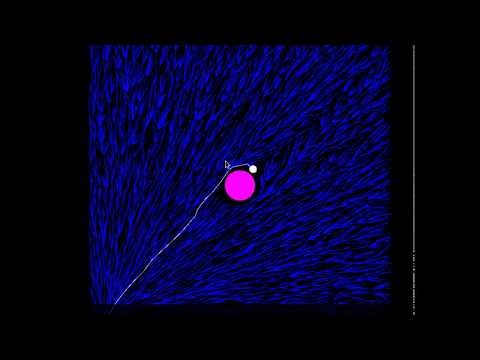
| PRM/A* | RRT | RRT* |
|---|---|---|
 |
 |
 |
 |
 |
 |
 |
 |
 |
| Graph | Growing tree | Growing and mutating tree |
| Takes more memory | Takes less memory | Takes less memory |
| Build time depends on environment | Build time depends on environment | Build time depends on environment |
| Probabilistically complete (Finds a path at limit) | Probabilistically complete (Finds a path at limit) | Probabilistically complete (Finds a path at limit) |
| Asymptotically optimal (Finds optimal path at limit) | Asymptotically NON optimal (Maynot optimal path at limit) | Asymptotically optimal (Finds optimal path at limit) |
- In
RRTandRRT*the tree is grown interactively. - In
RRTnote that even when tree grows considerably the path to finish does not change and more importantly is not a shortest one. - In
RRT\*note that as tree grows the path to finish decreases until it reaches a shortest path at limit. PRMmethod is used in most demos.
 |
 |
 |
 |
 |
 |
 |
 |
- Simple case.

- Interactive placement.

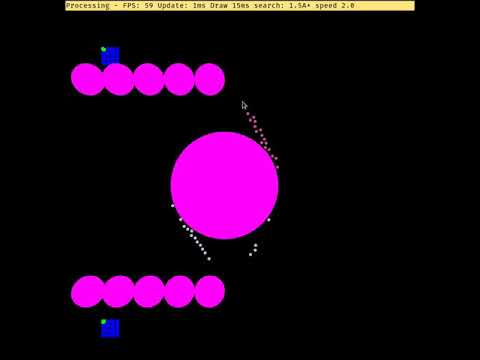
- Antipodes.

- Traffic circle.
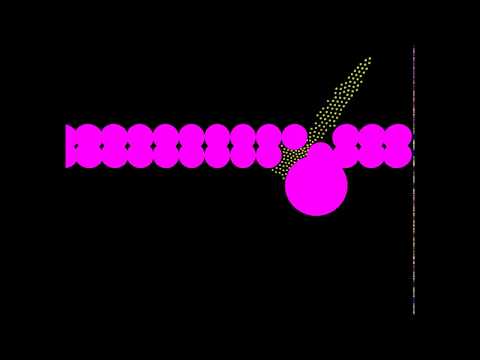
- Bottleneck.
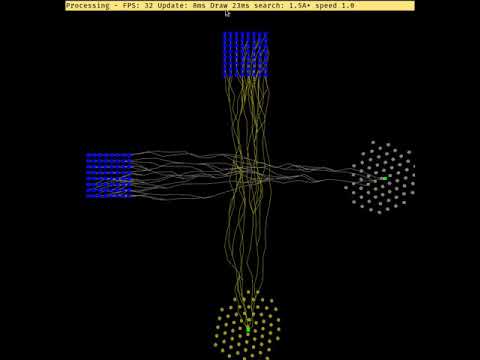
- Crosspaths.
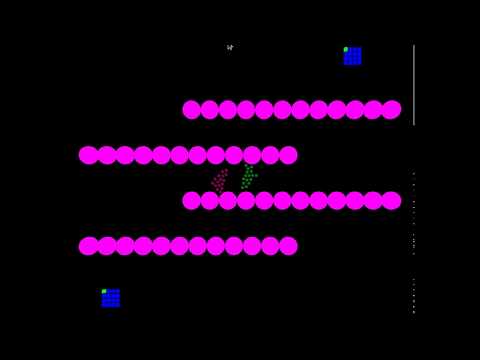
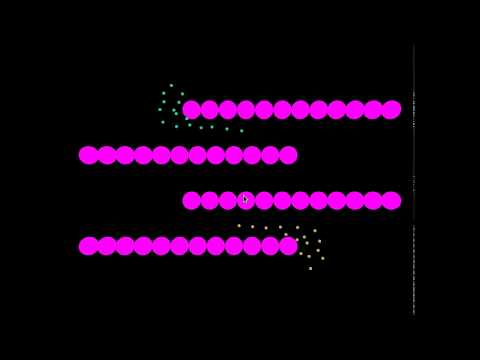
- Hallway.

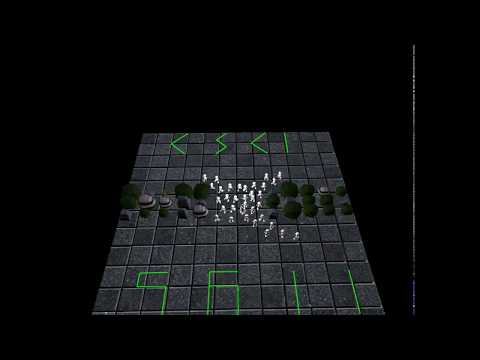
- 2D swarms.
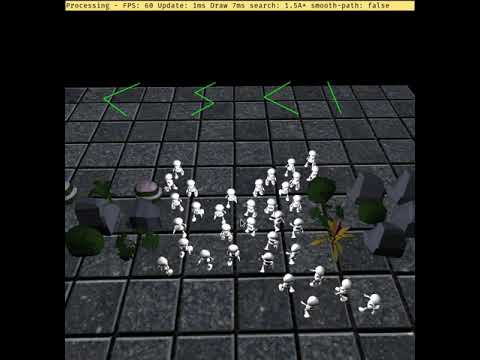
- 3D swarms.

 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
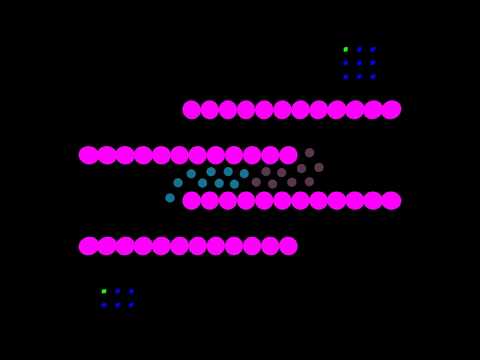
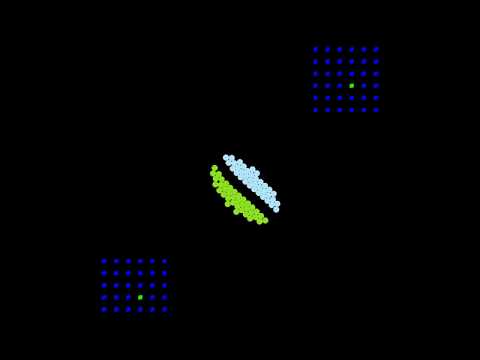
- Two flocks.

 |
 |
 |
 |
| time-to-collision | boids |
|---|---|
 |
 |
 |
 |
- Too narrow passages.
- Takes a lot of time at the junction for the traffic to clear due to high symmetry.

- Some agents are beings captured by other flock.
- 3D context.
- Walkcycle.
- Bounding sphere heirarchy.
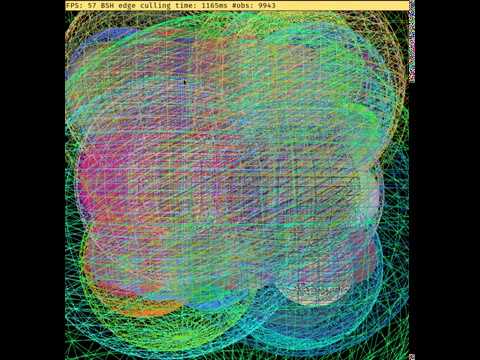
- Bounding sphere heirarchy is used as a spatial data structure to cull the edges of PRM that intersect obstacles.
- The title bar shows the current state (data structure used, time taken to cull edges, #obstacles).
b- reset using bsh data structure.v- reset using vanilla data structure.- ~10k obstacles almost uniformly spaced.
- Obstacles visualized @
00:23. - Free edges visualizes @
00:30. - BSH edge culling @
00:46 - 00:56, done several times. - Vanilla edge culling @
00:58 - 01:10, done barely once, screen is unresponsive in that time. - Bounding spheres visualized @
01:35. - BSH edge culling time ~ 1000ms.
- Vanilla edge culling time ~ 12900ms.
- 12.9x faster.
- Speedup increases with setup size.

- The graph shows the average run time of the algorithms for searching the path in milliseconds.
- Each algorithm was run in simulations with 196 agents and the average time of searching the path for all the agents is calculated.
- There is a sharp decrease in search time with A* and weighted A*.
- Most of the demos use A* search.
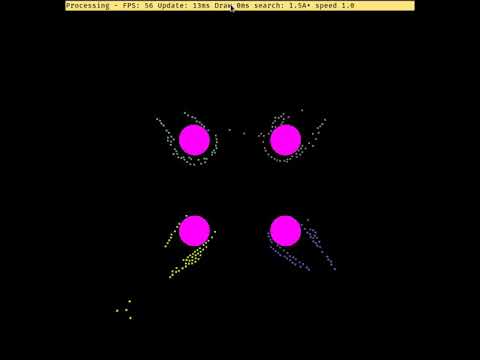
- The agent is a directed linesegment with direction visualized by two boxes at center and one end.
- The agent makes 180 degree turn in its journey from start to finish.
- The paths in 3D configuration space and its mapping in 2D as position and orientation is visualized.
- The milestones inside obstacles in 3D configutation space are colored pink.
- Path smoothing is done using a bounding sphere for the agent and is demonstrated.
- The title bar shows whether or not smooth pathing is done and which search is used.
 |
 |
 |
 |
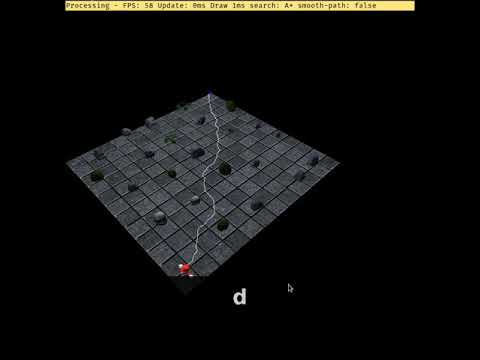
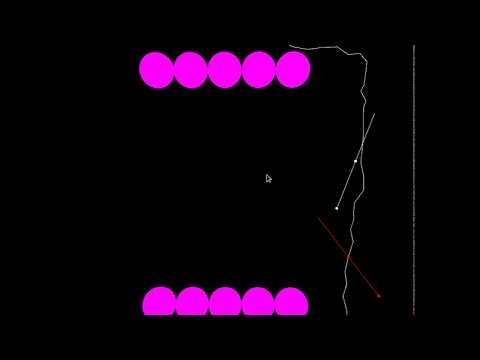
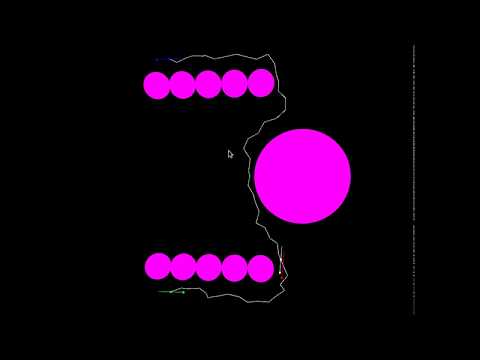
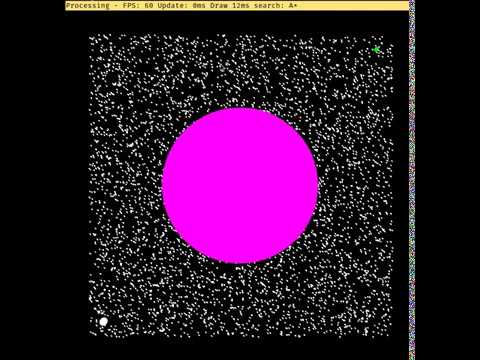
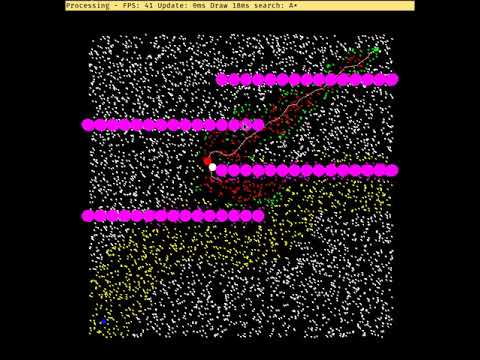
- The robot does not know where the obstacles are.
- It has a sensor which tells the positions of obstacles in a fixed sphere around the it.
- Therfore it doesnot know what exists beyond that sensing sphere.
- It need to reach the goal on top right.
- The yellow points represent sensed region.
- The agent always stays inside sensed region.
- The milestones found to be inside obstacles are colored pink.
- Green and red points are related to search as before.
- Note that in videos the obstacles are sometimes hidden to visualize what the world looks like for the agent.
- Path smoothing is done only inside the sensed region is demonstrated.
- The title bar shows whether or not smooth pathing is done and which search is used.
- Sense
- Plan to go to finish using milestones as if there are no other obstacles other than what is found
- Move along that path (until the edge of sensed area)
- If finish reached stop, else go to step 1
- Wall
- Path smoothing @
00:23.
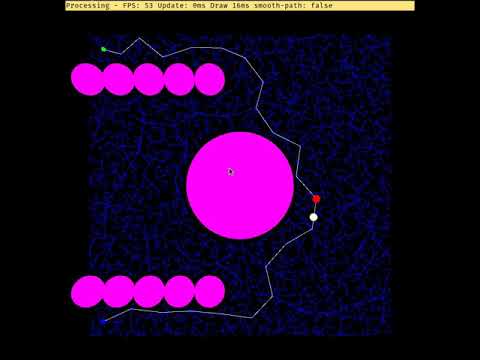
- Big ball
- Unreachable
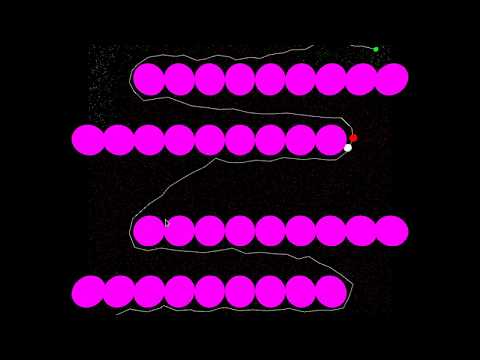
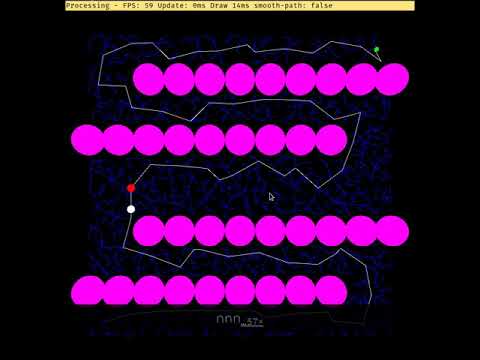
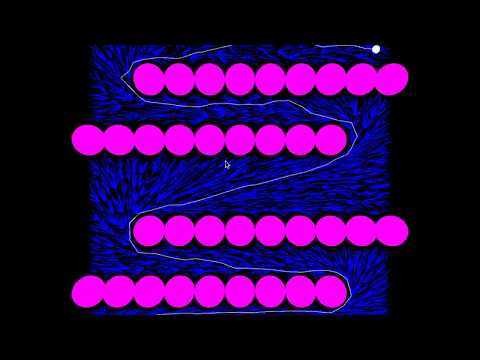
- Zig zag
 |
 |
 |
 |
 |
 |
 |