You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
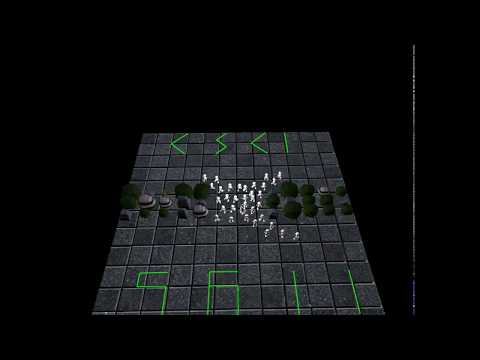
Simple motion planning algorithms for single agent, crowd and flocks in known/unknown environments.
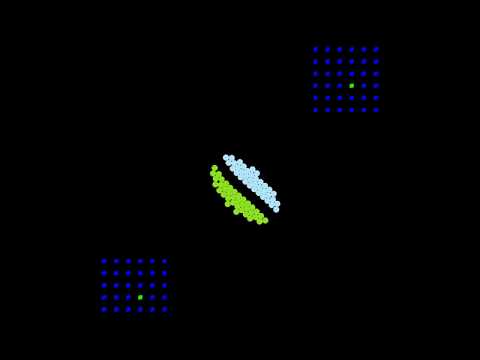
The task for an agent is to reach its goal without colliding with obstacles or other agents.
roadmap
Problems solved until now are listed in demonstration section.
code
Code is written in Java, should work with JRE 8+.
src/ contains all source code.
jars/ contain all libraries bundled as jars.
processing is used as a rendering library.
queasy cam is used as a camera library.
data/ contains resources such as images, obj, mtl files.
documentation
For most of the code, the documentation is itself.
usage
Open a terminal at project root (the directory containing this file).
Use javac -cp "jars/*" -d build/ $(find -name "*.java") to compile and put all output class files under build/.
Use java -cp "build/:jars/*" <package>.<to>.<path>.<class> to run any simulation.
For example java -cp "build/:jars/*" demos.WalkCycle.
Common controls
w a s d for basic camera movements.
q e for camera up and down movements.
p for pause/play.
Tested on Ubuntu 18.04
If you use a distrubution that uses rolling release cycle (like Arch) you might have to install some older version of JRE and mesa (opensource intel openGL driver) that work with processing library.
demonstration
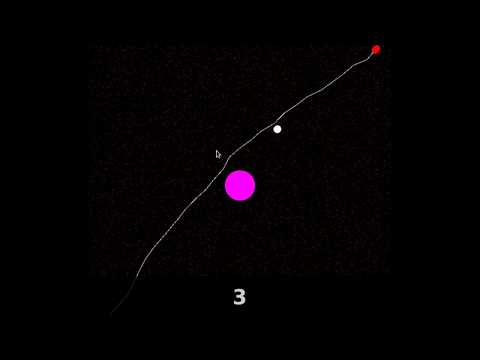
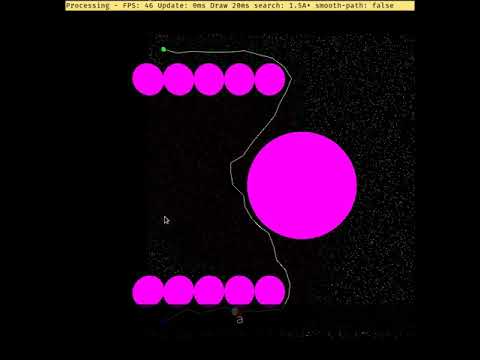
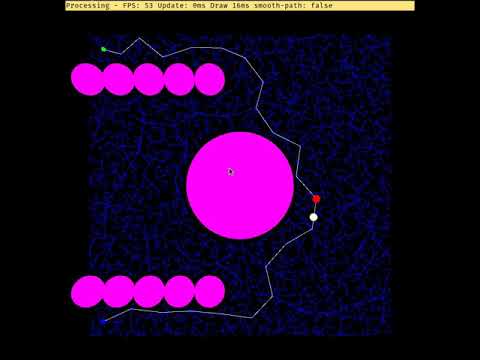
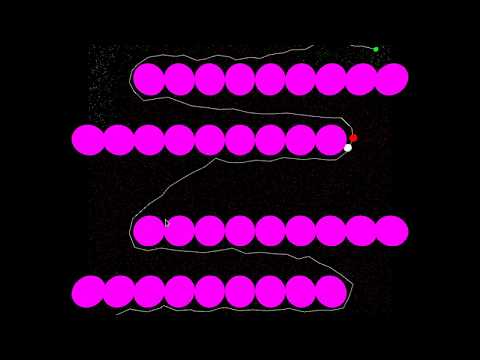
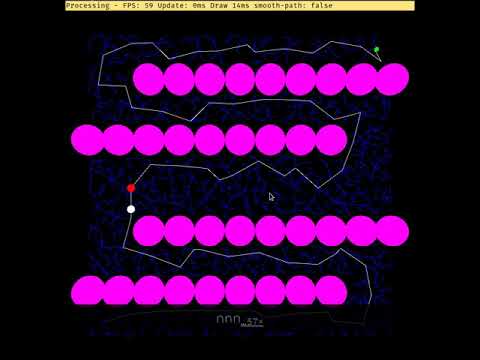
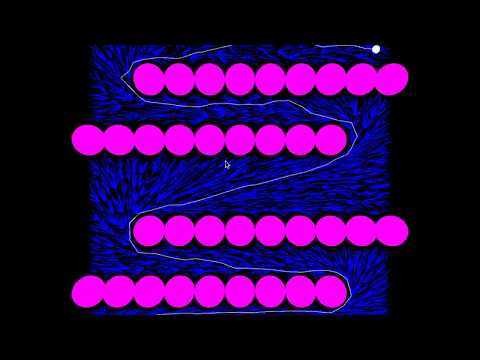
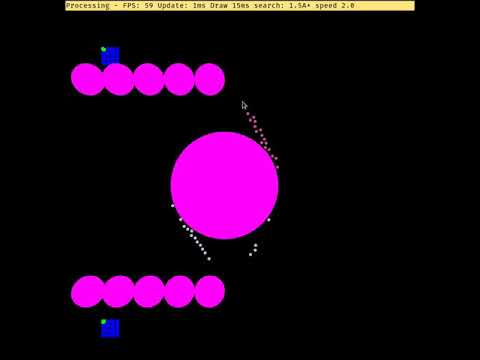
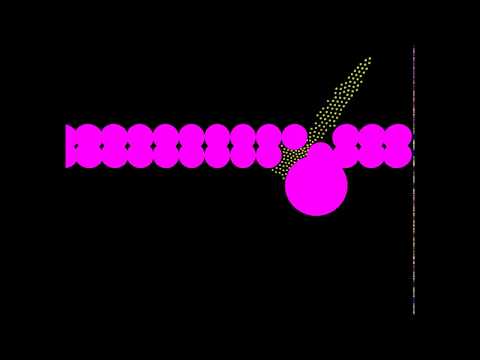
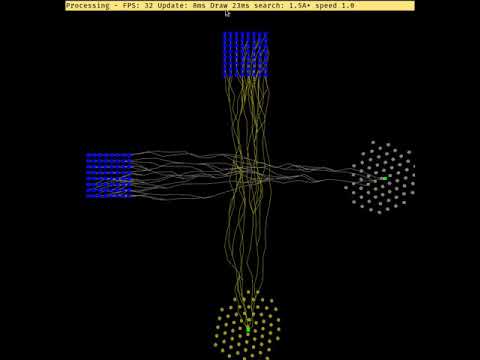
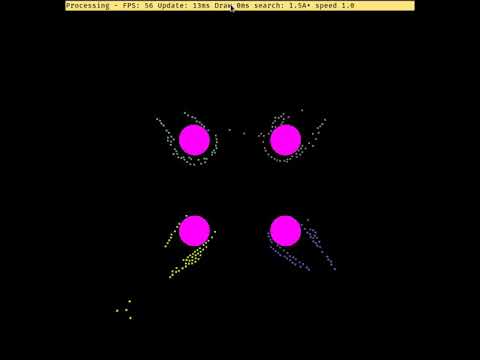
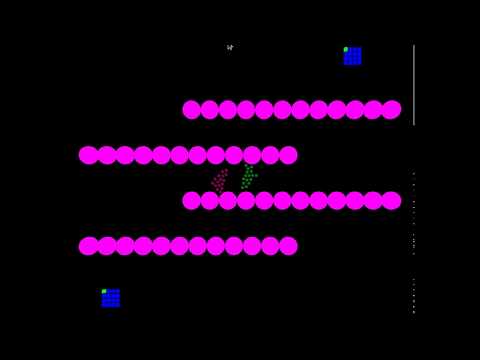
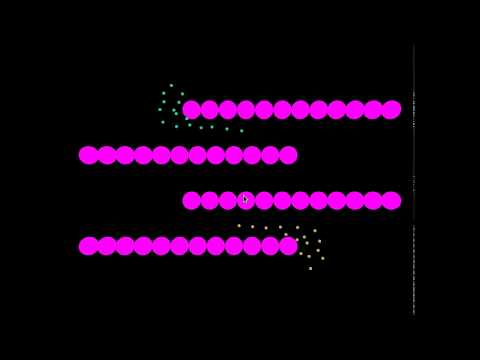
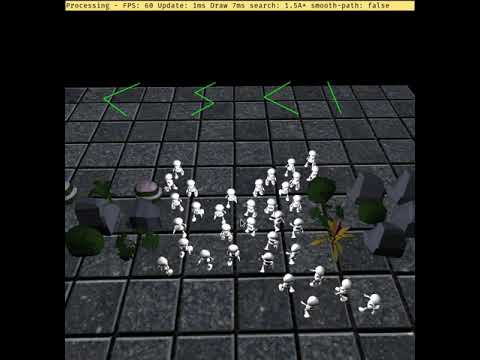
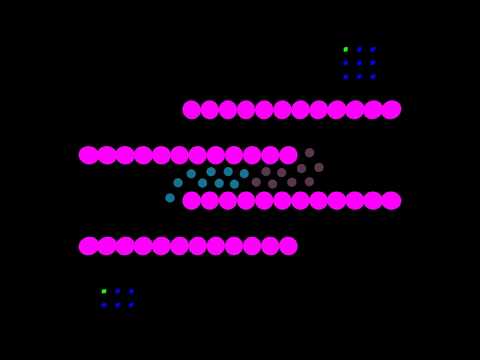
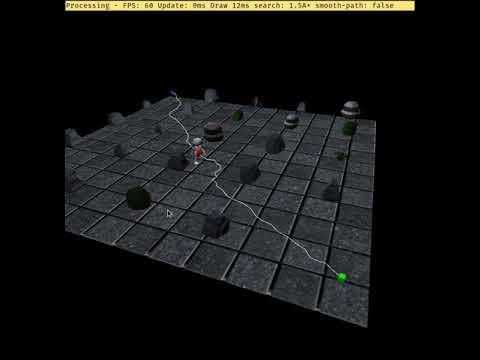
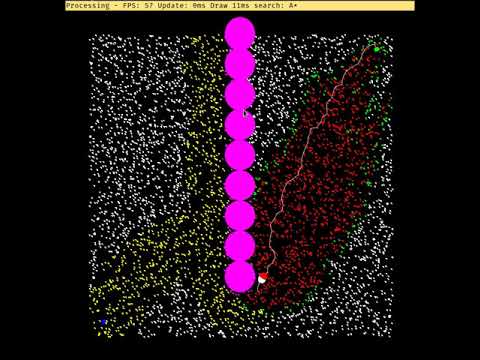
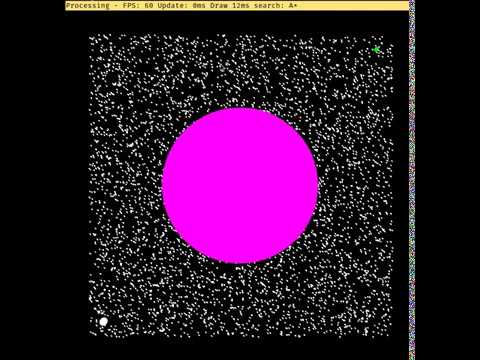
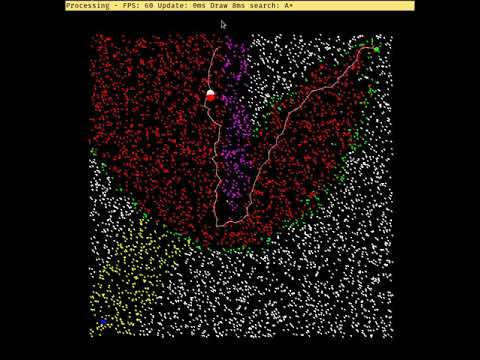
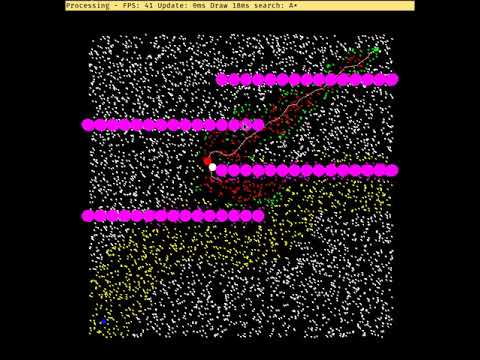
The following color scheme is used in all videos.
Syntax
Description
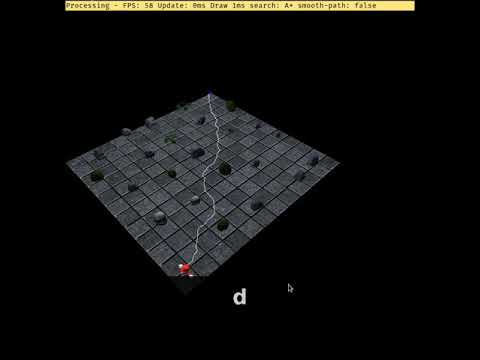
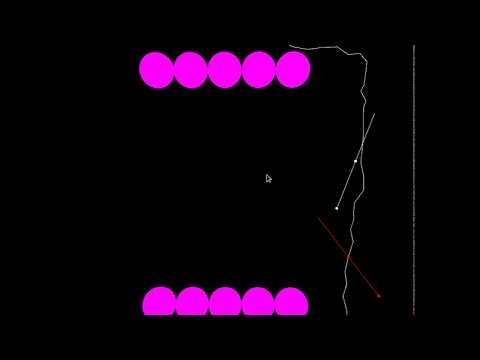
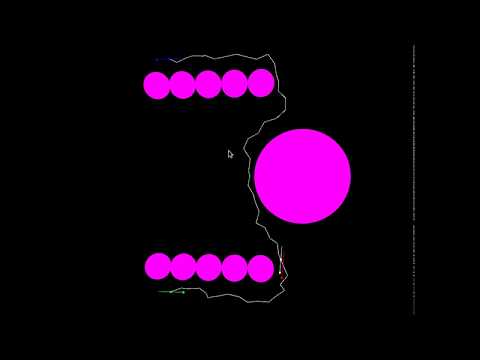
white sphere/line
agent
red sphere/line
agent in the future (useful to visualize how the path is smoothed)
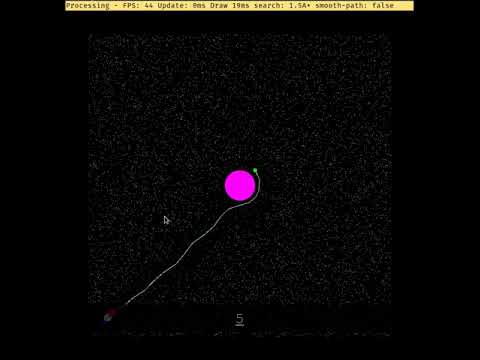
green cube
goal
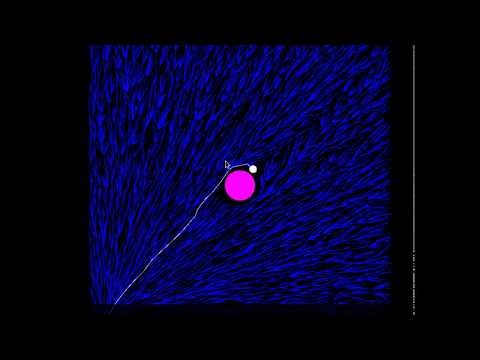
pink circle
obstacle
white point
sampled milestone
pink point
milestone inside obstacle
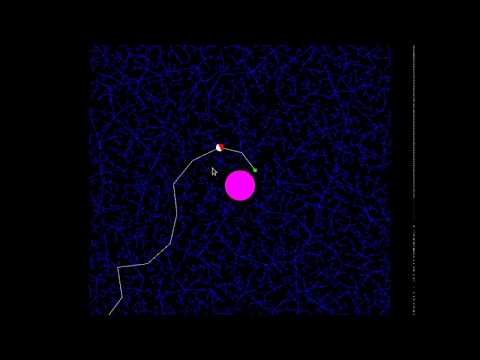
green point
milestone on the fringe during search
red point
explored milestone during search
The title bar shows the state of the system at any instant (current search algorithm, path smoothing on/off ...).