コマンドチートシート
rosaddress server
roslaunch motoman_control sia5_with_dhand_and_multi_kinect_streaming.launch
roslaunch motoman_control sia5_real_control.launch
roslaunch motoman_point_cloud kinect_cloud_merger.launch
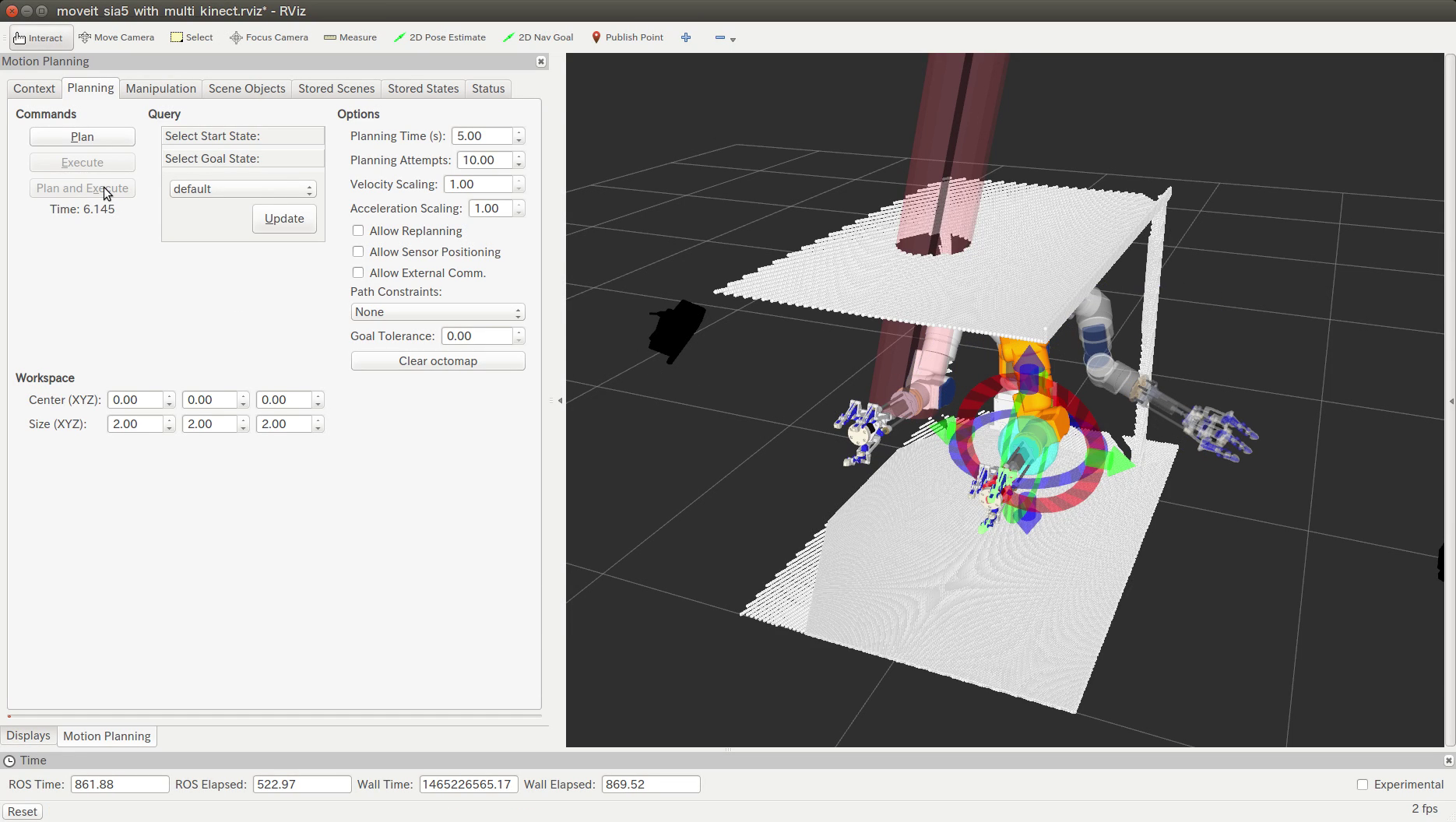
roslaunch motoman_moveit sia5_with_dhand_and_multi_kinect_moveit_planning_execution.launchrosaddress client 192.168.12.100
roslaunch kinect2_bridge kinect2_bridge.launch base_name:=kinect_first
# roslaunch kinect2_bridge kinect2_bridge.launch base_name:=kinect_second
roslaunch motoman_point_cloud kinect_downsampler.launch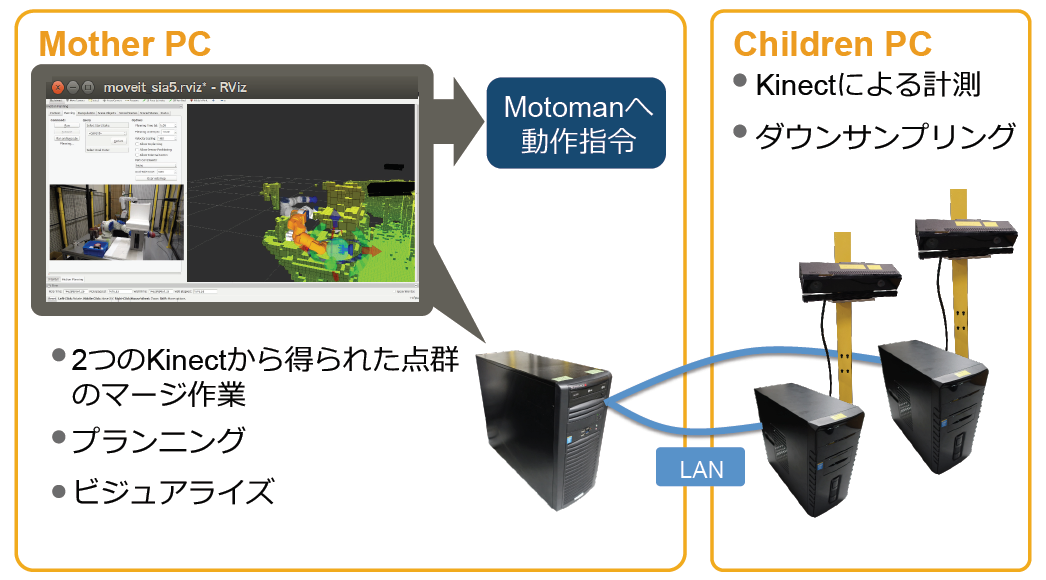
source Workspace/ROS/motoman_ws/src/motoman_project/scripts/rosaddress.bash
rosaddress server
roslaunch motoman_control sia5_with_dhand_streaming.launch
roslaunch motoman_control sia5_real_control.launch
rosrun motoman_point_cloud tf_interactive_marker.py base_link kinect_first 0.8863 -0.7398 0.7912 0.0 0.5061 1.9897
# motoman_description/robots/sia5/sia5_with_dhand_and_multi_kinect.urdf.xacroの16行目からroslaunch kinect2_bridge kinect2_bridge.launch base_name:=kinect_first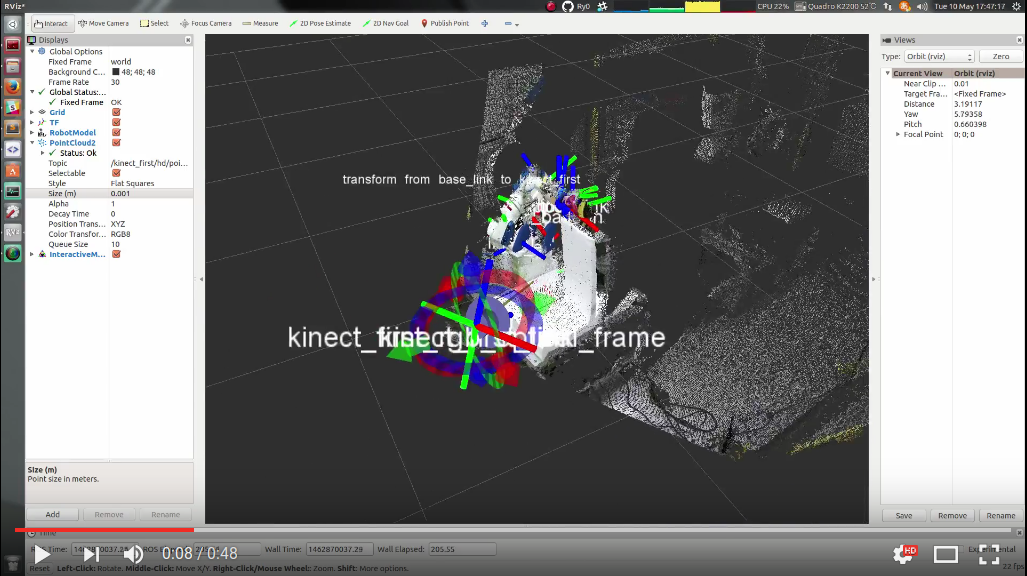
Kinectを立ち上げた状態で
roslaunch motoman_euclidean_cluster euclidean_cluster.launch 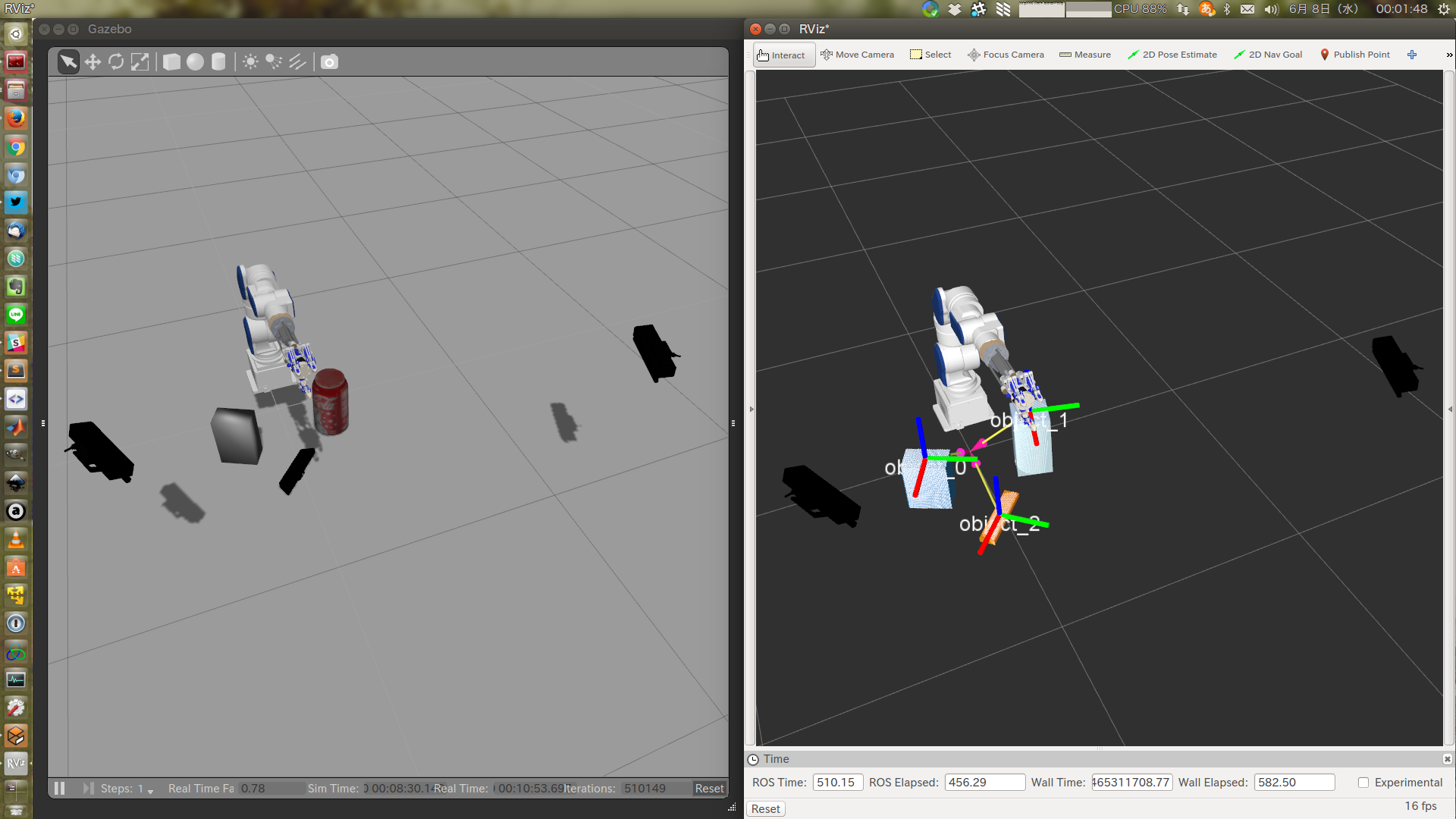
merged_cloudをsubscribe
roslaunch motoman_cable_removal motoman_cable_removal.launch