This is a library for LSM9DS1 (accelerometer, gyroscope and magnetometer) sensor with examples that allows you to calibrate, visualize orientation and send messages to ROS via Arduino.
It has embedded madgwick and mahony filter algorithms to get correct orientation from the sensor.
-
Ixmatix_LSM9DS1_ROS - LSM9DS1 sensor communication with ROS and use of Madgwick filter (Not compatible for Arduino Uno due to lack of memory using ROS nodehandler).
- Gets orientation quaternion from filter algorithms.
- Sends sensor_msgs/Imu messages.
- Broadcasts IMU transforms.
-
Ixmatix_LSM9DS1_ROS_no_nodehandler - The same as Ixmatix_LSM9DS1_ROS but it doesn't need ROS nodehandler and reduces memory. Check this imu serial port node to get this arduino example to work.
- Compatible with Arduino Uno
-
Ixmatix_visualise_orientation - Use of OrientationVisualiser software for Processing to check correct orientation and configuration from sensor.
-
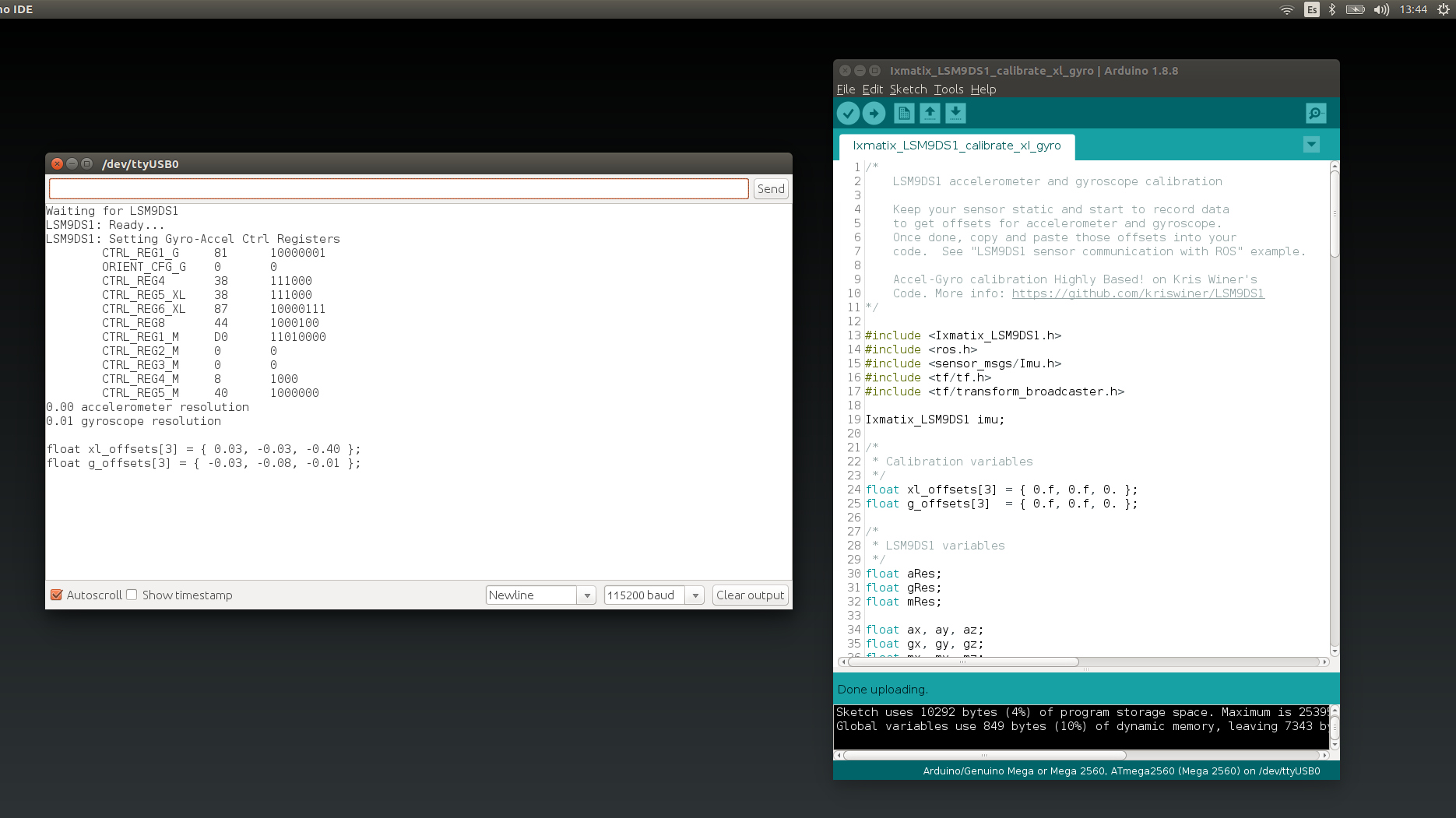
Ixmatix_calibrate_xl_gyro - Example that allows you to get offsets for accelerometer and gyroscope.
-
Ixmatics_calibrate_magnetometer - Magnetometer calibration with Hard-Iron and Soft-Iron corrections.

- LSM9DS1 Datasheet - For reference.
- MotionCal - For magnetometer calibration.
- OrientationVisualiser - Script for Processing.