This repository provides code and data to train and evaluate the 3DSmoothNet, compact local feature descriptor for undstructured point clouds. It represents the official implementation of the paper:
Zan Gojcic, Caifa Zhou, Jan D. Wegner, Andreas Wieser
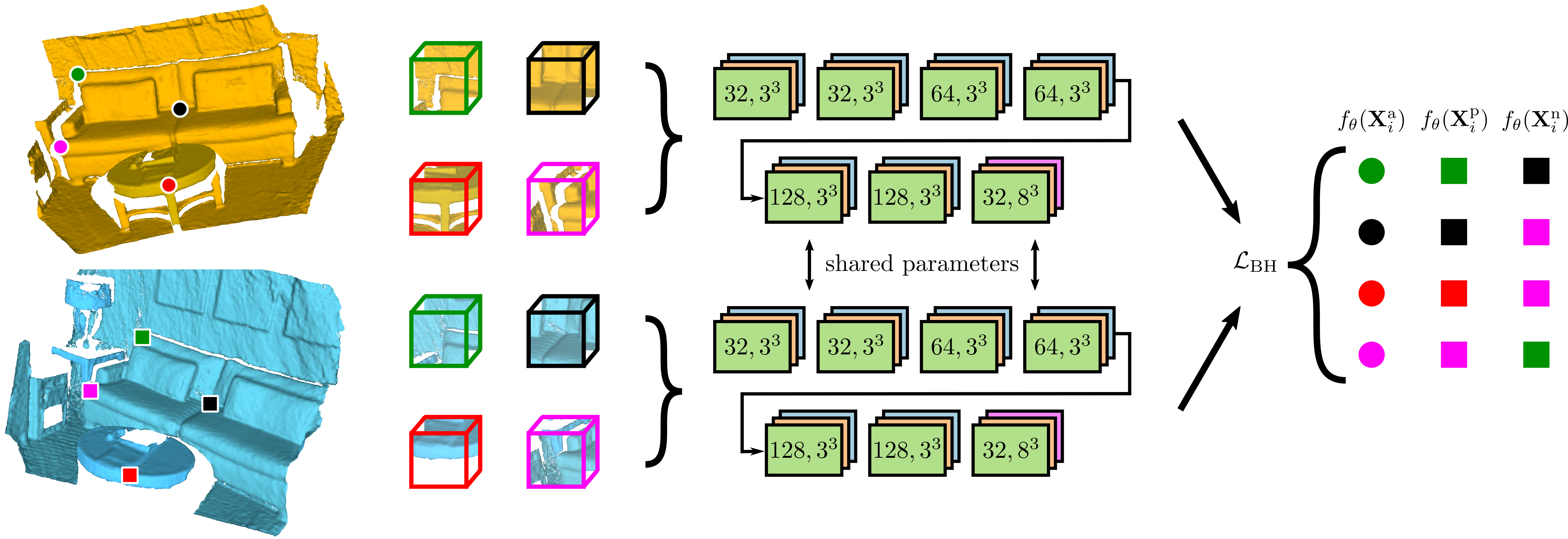
We propose 3DSmoothNet, a full workflow to match 3D point clouds with a siamese deep learning architecture and fully convolutional layers using a voxelized smoothed density value (SDV) representation. The latter is computed per interest point and aligned to the local reference frame (LRF) to achieve rotation invariance. Our compact, learned, rotation invariant 3D point cloud descriptor achieves 94.9% average recall on the 3DMatch benchmark data set, outperforming the state-of-the-art by more than 20 percent points with only 32 output dimensions. This very low output dimension allows for near realtime correspondence search with 0.1 ms per feature point on a standard PC. Our approach is sensor- and sceneagnostic because of SDV, LRF and learning highly descriptive features with fully convolutional layers. We show that 3DSmoothNet trained only on RGB-D indoor scenes of buildings achieves 79.0% average recall on laser scans of outdoor vegetation, more than double the performance of our closest, learning-based competitors.
! Update: We have submitted a revised version of the paper to Arxiv for correcting the typo.
If you find this code useful for your work or use it in your project, please consider citing:
@inproceedings{gojcic20193DSmoothNet,
title={The Perfect Match: 3D Point Cloud Matching with Smoothed Densities},
author={Gojcic, Zan and Zhou, Caifa and Wegner, Jan Dirk and Wieser Andreas},
booktitle={International conference on computer vision and pattern recognition (CVPR)},
year={2019}
}If you have any questions or find any bugs, please let us know: Zan Gojcic, Caifa Zhou {[email protected]}
The pipeline of 3DSmoothNet consits of two steps:
-
main.cpp: computes the smoothed density value (SDV) voxel grid for a point cloud provided in the .ply format. -
main_cnn.py: Inferes the feature descriptors from the SDV voxel grid using the pretrained model. Can also be used to train 3DSmoothNet from scratch or for fine-tuning
Computation of the SDV voxel-grid impelemented in C++ has dependencies on the Point Cloud Library (PCL) and OpenMP. For convinience we include a shell script, which can be used to install PCL as
./install_pcl.shThe CNN part of the pipeline is based on Python3 (specifically 3.5) and is implemented in Tensorflow. The required libraries can be easily installed by runing
pip install -r requirements.txtin a new virtual environment.
To get the correct cuda and cudnn version you can also use the following docker: nvidia/cuda:9.0-cudnn7-devel-ubuntu16.04
We provide a cmake file that can be used to compile main.cpp as:
cmake -DCMAKE_BUILD_TYPE=Release .
makewhich will create an executable 3DSmoothNet that takes the following command line arguments:
-f Path to the Input point cloud file in .ply format
-r Half size of the voxel grid in the unit of the point cloud. Defaults to 0.15.
-n Number of voxels in a side of the grid. Whole grid is nxnxn. Defaults to 16.
-h Width of the Gaussia kernel used for smoothing. Defaults to 1.75.
-k Path to the file with the indices of the interest points. Defults to 0 (i.e. all points are considered).
-o Output folder path. Defaults to "./data/sdv_voxel_grid/".
The testing with the pretrained models ./models/ for 16, 32 and 64 dimensional 3DSmoothNet can be easily done by runing
python ./main_cnn.py --run_mode=test
which will infer the 3DSmoothNet descriptors for all SDV voxel-grid files (*.csv) located in ./data/test/input_data/. For more options in runing the inference please see ./core/config.py
The provided code can also be used to train 3DSmoothNet from scratch using e.g.:
python ./main_cnn.py --run_mode=train --output_dim=32 --batch_size=256
to train a 32 dimensional 3DSmoothNet with mini-batch size 256. By defult, the training data saved in data\train\trainingData3DMatch\ wil be used and the tensorboard log will be saved in ./logs/. For more training options please see ./core/config.py.
The source-code for the performance evaluation on the 3DMatch data set is available in the ./evaluation/.
In order to compute the recall, first run the correspondenceMatching.m and then the evaluate3DMatchDataset.m.
With small changes of the point cloud names and paths, the code can also be used to evaluate the performance on the ETH data set.
- Procedures
- Prepare the dataset (as
.plyformat): collect your own point clouds (for fine-tuning) or download the benchmark dataset (e.g. 3DMatch) - Perform the Input parametrization using the
main.cpp - Save the SDVs into
tfrecordusingsaveDataToTFrecordsExample.py. - Train the model e.g., using
for ouputing a 32-dim featurespython ./main_cnn.py --run_mode=train --output_dim=32 --batch_size=256 - Prepare the dataset (as
- Generate training using
3dmatch- Extract point clouds (
.ply) from RGB-D images according using 3dmatch-toolbox - Sample positive tuples: for each pair of training fragments (e.g.,
$F_i$ and$F_j$ ) which has more than 30% overlap (This is given in3DMatchdataset), arbitrarily sample 300 points wihtin the overlap region from$F_i$ and found their nearest neighbors in the transformed$F_j$ . Positive tuples defined as those whose the distance between the nearest neighbor less than the average resolution (around 6 mm) of3DMatchdataset (can be retrieved from3dmatch-toolbox.) - Compute the SDV for those sampled point pairs and format the SDVs of each pair into one row vector. I.e. each row is one training example.
- Save the SDVs into
tfrecord
- Extract point clouds (
We prepared a small demo which demonstrates the whole pipeline using two fragments from the 3DMatch dataset. To carry out the demo, please run
python ./demo.py
after installing and compiling the necessary source code. It will compute the SDV voxel-grid for the input point clouds, before infering 32 dimensional 3DSmoothNet descriptors using the pretrained model. These descriptors are then used to estimate the rigid-body transformation parameters using RANSAC. Software outputs the results of RANSAC as well as two figures, first showing the inital state and the second the state after the 3DSmoothNet registration

Training data created using the RGB-D data from 3DMatch data set can be downloaded from here (145GB).
It consists of a *.tfreford file for each scene, due to the size of the data several scenes are split into more *.tfreford files (329 files all together). In order to train the model using this data replace the sample_training_file.tfrecord file in ./data/train/trainingData3DMatch/ with the files from this archive. When run in train mode the source code will automatically read all the files from the selected folder.
If you use these data please consider also citing the authors of the data set 3DMatch.
The pointclouds and indices of the interest points for the 3DMatch data set can be downloaded from here (0.27GB)
If you use these data please consider also citing the authors of the data set 3DMatch.
The pointclouds and indices of the interest points for the 3DSparseMatch data set can be downloaded from here (0.83GB)
If you use these data please consider also citing the authors of the original data set 3DMatch.
The pointclouds and indices of the interest points for the ETH data set can be downloaded from here (0.11GB)
If you use these data please consider also citing the authors of the original data set ETH.
The pretrained model of the 3DSmoothNet with 128 dim can be downloaded from here (0.10GB)
To use this model please unpack the archive to ./models/128_dim/.
- Add source code of the descriptors used as baseline
This code is released under the Simplified BSD License (refer to the LICENSE file for details).