Projekt obsahuje implementaci knihovny pro softwarové generování pulzně šířkové modulace sw-pwm.c a sw-pwm.h. Ke své činnosti využívá jeden časovač. Je založena na knihovně HAL od STMicroelectronics. Umožnuje generovat jak rychlé, tak i fázově korektní PWM. Dá se snadno portovat i na jiné rodiny STM32. Její využití je zamýšleno hlavně pro ovládání jesu většího množství LED.
Je třeba si vytvořit instanci struktury sw_pwm_channel_t a pojmenovat ji sw_pwm_channel! Tu je třeba inicializovat na GPIO která chce uživatel použít. Předpokládá se, že uživatel si GPIO nastavil jako výstupní za použití nástroje STM32CubeMX.
// inicializace bez komparačních hodnot
volatile sw_pwm_channel_t sw_pwm_channel[] = {
{ PWM0_GPIO_Port, PWM0_Pin },
{ PWM1_GPIO_Port, PWM1_Pin },
{ PWM2_GPIO_Port, PWM2_Pin },
{ PWM3_GPIO_Port, PWM3_Pin }
};Kde:
PWMx_GPIO_Portje ukazatel naGPIO_TypeDeftedy port.PWMx_Pinčíslo odpovídající konkrétnímu pinu.
// inicializace s komparačními hodnotami
volatile sw_pwm_channel_t sw_pwm_channel[] = {
{ PWM0_GPIO_Port, PWM0_Pin, 0x00 },
{ PWM1_GPIO_Port, PWM1_Pin, 0x2A },
{ PWM2_GPIO_Port, PWM2_Pin, 0x7F },
{ PWM3_GPIO_Port, PWM3_Pin, 0x42 }
};Ke kompletnímu ovládání SW PWM slouší singleton sw_pwm, který se nachází v souboru sw_pwm.c a pro korektní funkci je nutné jej inicializovat metodou sw_pwm.init(...)
// hlavička inicializační metody
void sw_pwm.init(
TIM_HandleTypeDef *htim_p,
uint32_t number_of_channels,
uint32_t freq,
sw_pwm_phase_t phase,
sw_pwm_comp_init_t comp
);Kde:
htop_pukazatel na strukturuTIM_HandleTypeDef, kterou vygeneruje STM32CubeMX po nastavení časovače.number_of_channelsnastavuje počet kanálů.freqkmitočet generovaného PWM signálu v Hz.phasetyp fázek PWM má dvě možnosti:SW_PWM_PHASE_CORRECTfázově korektní je založena na čítání nahoru a po dosáhnutí vrcholu čítání zpět do nuly, nemůže tedy vzniknout pulz nekorektní délky při změně komparační hodnoty.SW_PWM_PHASE_INCORRECTfázově nekorektní nekdy zvané rychlé PWM vhodné například pro ovládání LED. Je zalořenou na čítání do vrcholu a následného přetečení na nulu. výhodou této volby je dvakrát vyšší maximální frekvence než u fázově korektní volby.
compnastavení komparační úrovně má tyhle možnosti:SW_PWM_COMP_NOINITneovlivnujě komparační úroveň, umožnuje si nastavit komprarační hodnoty individuálně pro každý kanál externě.SW_PWM_COMP_ZEROnastaví komparační úroveň na nulu, generuje LSW_PWM_COMP_HALFkomparační úroveň na polovinu rozsahu, střída 1:1SW_PWM_COMP_FULLkomparační úroveň na plná rozsah, genuruje H
Časovači je třeba povolit přerušení při dosáhnutí vrcholu. Poté je třeba do příslušného callbacku přidat volání callbacku sw_pwm.config_p->it_callback().
// HAL callback dočítání časovače do stropu
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim_p)
{
// vyhodnoce jestli toto volání způsobil náš čítač
if (htim_p == sw_pwm.config_p->htim_p)
{
sw_pwm.config_p->it_callback();
}
}Po inicializaci můžeme začít generovat PWM. K zahájení generování signálu je nezbytné zavolání metody sw_pwm.run(). Ta vynuluje čítač a spustí časovač.
// zahájení generování PWM signálu
sw_pwm.run()K jednotlivým SW PWM kanálům je snadný přístup díky singletou sw_pwm.
// ukázka změny prahové úrovně kanálu 2
sw_pwm.channel[2] = 127;
// ukázka změny hodnot všech kanálů
for (int i = 0; i < sw_pwm.config->number_of_channels; i++)
sw_pwm.channel[i] = 22;Deaktivuje prerušení od časovače a nastavý všechny SW PWM kanály do logické úrovně L.
// zastavení generování PWM signálu
sw_pwm.stop()pro vyhodnocení knihovny byl využit jeden GPIO pin jehož hodnota byla nastvena na H při vstupu do callbacku obsluhy přerušení a opět nastavena do L před jeho ukončením. Osciloskopem byla měřena střída jakožto informace o zatížení procesoru.
Při všech experimentech byl MCU i timer taktován na 48 MHz.
Test proběl při kmitočtu 100 Hz a 16 aktivních kanálech.
| OPT | POPIS | VYTÍŽENÍ CPU |
|---|---|---|
-O0 |
optimalizace off | 57 % |
-O1 |
optimalizace level 1 | 25 % |
-O2 |
optimalizace level 2 | 24 % |
-O3 |
optimalizace level 3 | 23 % |
-Os |
optimalizace na velikost | 33 % |
Tento test byl prováděn s 18 kanály a optimalizací -O3.
| FREQ | VYTÍŽENÍ CPU |
|---|---|
| 1 Hz | 1 % |
| 10 Hz | 3 % |
| 100 Hz | 26 % |
| 200 Hz | 53 % |
| 300 Hz | 74 % |
Tento test byl prováděn s kmitočtem 200 Hz a optimalizací -O3.
| POČET KANÁLŮ | VYTÍŽENÍ CPU |
|---|---|
| 1 | 7 % |
| 3 | 12 % |
| 7 | 23 % |
| 10 | 31 % |
| 13 | 39 % |
| 17 | 50 % |
| 20 | 57 % |
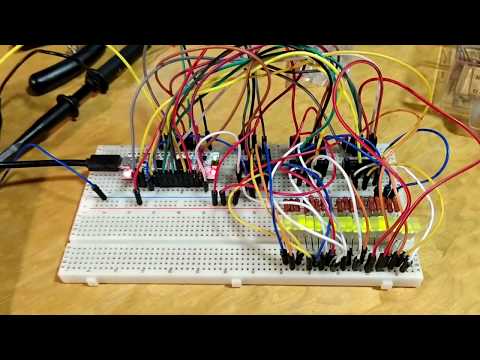
Generování PWM bylo otestování na kontaktním poli s vývojovou deskou nucleo-f021k6. Ta je osazena MCU STM32F031K6, dále obsahuje ST-Link V2, stabilizátor napětí a indikační LED.
Úkolem HW pžípravku je mimo otestovánání funkce PWM i měřit zatížení jádra mikrokontroléru v tomto případě jde o ARM Cortex-M0, taktovaným na 48 MHz s 32 Kib Flash a 4 KiB SRAM. Měření je pováděno na pinu označeném jako MEASUREMENT. Dále přípravek obsahuje integrovaqné obvody TESLA 7404 TTL NOT pro buzení LED.

Projekt byl vytvořes s použitím těchto nástrojů: