tutorials keydrive_details
The telop_twist_keyboard is a convenient way to test motion functionality by manually specifying Twist message contents to be published on the cmd_vel topic. The typical use-case for terrestrial robots is the teleoperation provides velocity setpoint commands (forward speed, yaw-rate, etc.) as Twist commands which are inputs to a low-level feedback controller which regulates the motion control.
For the WAM-V use-case we are using this at an even lower level. We are using the keyboard interface to set the thrust commands provided to the propulsion system. Following the Driving example should generate a ROS graph that looks like this
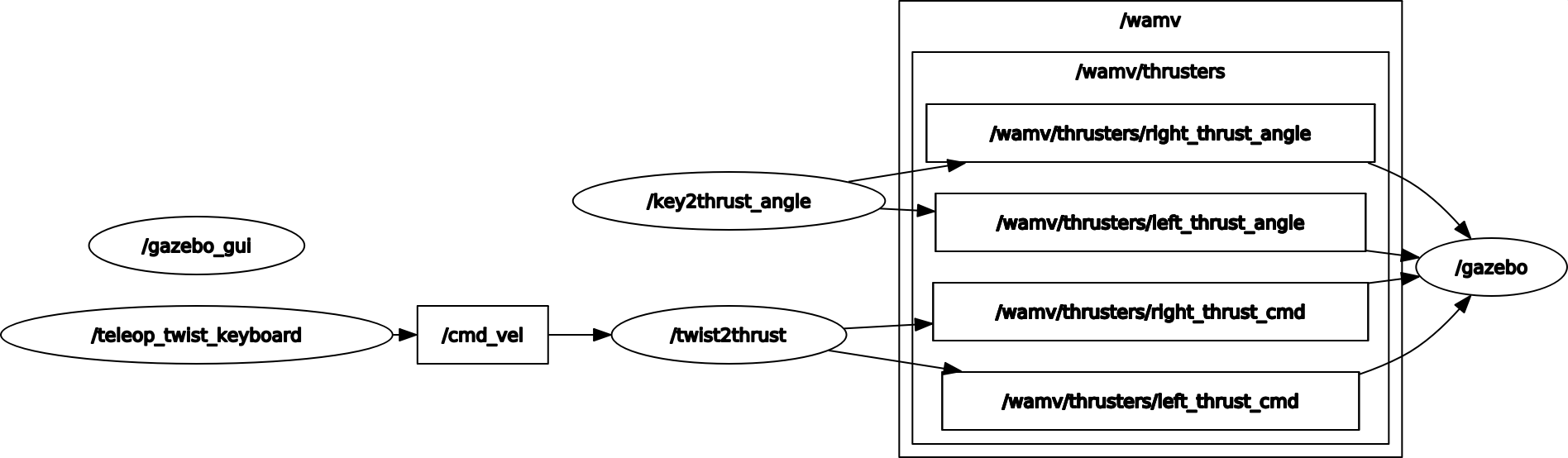 The custom
The custom twist2thrust node translates the published Twist messages as thrust messages for the left and right thrusters. In effect, this is an open-loop velocity controller where
- Commanded forward velocity (Twist.linear.x) maps to the propulsion thrust commands
- Commanded yaw velocity (Twist.angular.z) maps to differential propulsion thrust commands.
In other words:
right_thrust_cmd = Twist.linear.x + Twist.angular.z
left_thrust_cmd = Twist.linear.x - Twist.angular.z
We also include the custom key2thrust_angle node that takes keyboard commands and publishes Thruster Articulation commands. The instructions for using this node are
Reading from the keyboard and Publishing Thrust Angles!
---------------------------
Change Thrust Angle clockwise: h
Change Thrust Angle counter-clockwise: ;
r/v : increase/decrease thruster angle change speed by 10%
The basic setup from the Driving example, and illustrated in the ROS graph above, work for the H and T Propulsion Configurations.
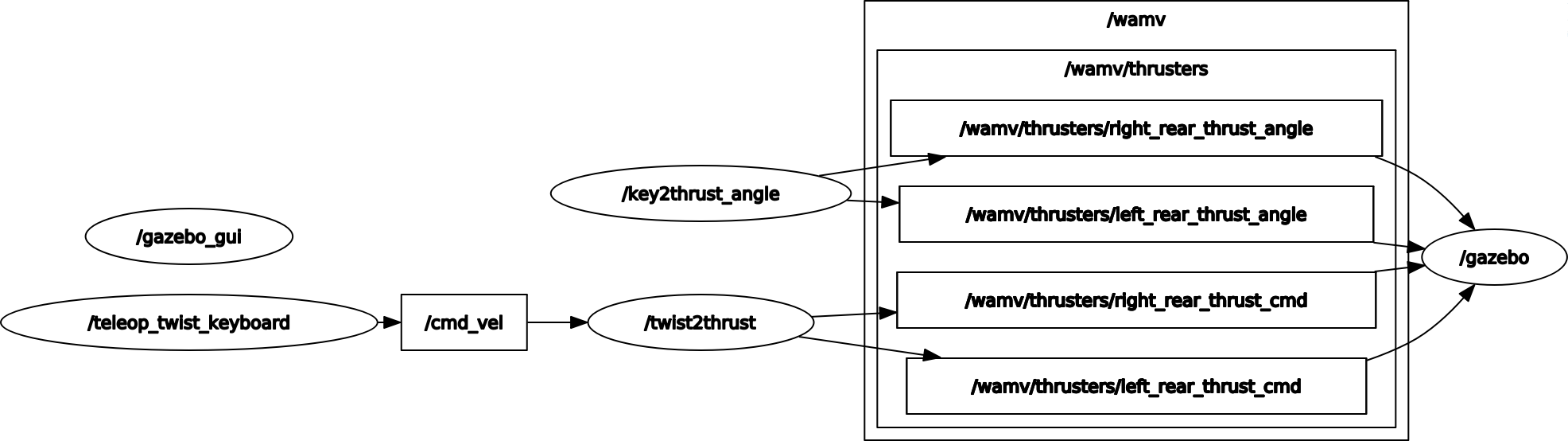
For the holonomic 'X' configuration the topic names for the thrusters is a bit different:
/wamv/thrusters/right_front_thrust_angle
/wamv/thrusters/right_front_thrust_cmd
/wamv/thrusters/right_rear_thrust_angle
/wamv/thrusters/right_rear_thrust_cmd
In this case we need to change the ROS interface between the teleop nodes and the simulated WAMV to include the extra rear modifier. The launch file accepts a command line argument for this case:
roslaunch vrx_gazebo sydneyregatta.launch thrust_config:=X
roslaunch vrx_gazebo usv_keydrive.launch thrust_config:=X