Site Test
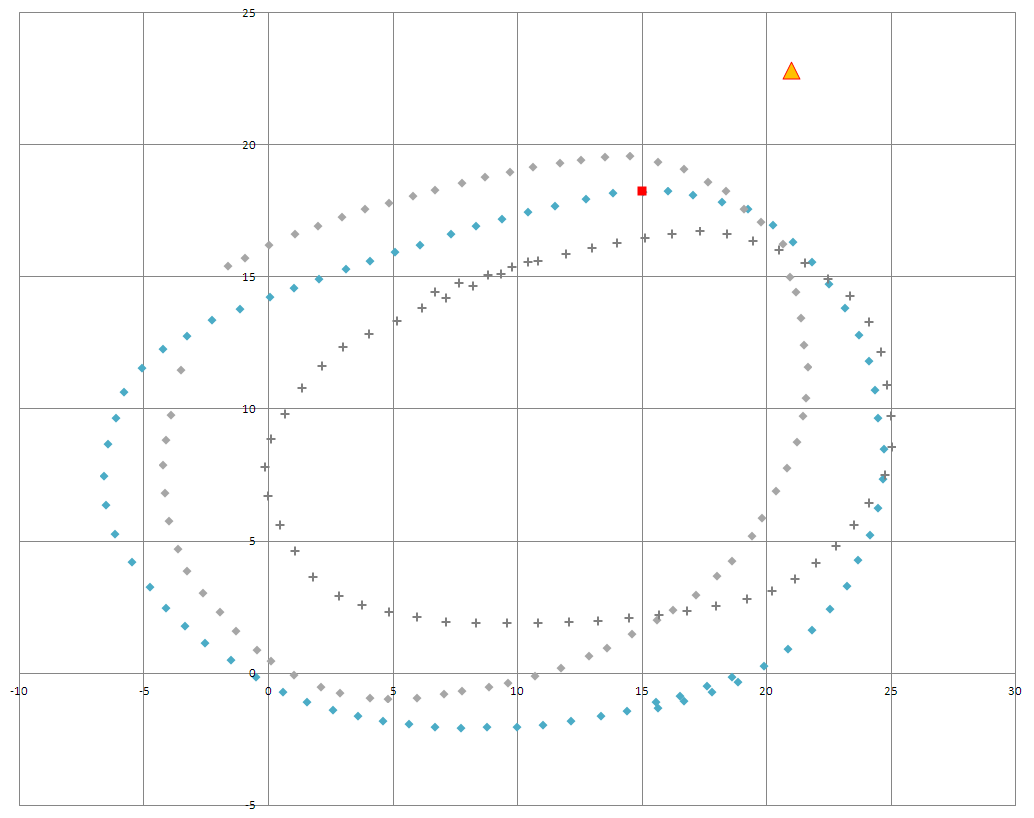
- Blue diamonds are the waypoints proposed by Carlos Galvez's team (EuroBots) and included in Udacity master pr/72 (determined from
udacity_succesful_light_detection.bag). - Gray diamonds are the waypoints identified by John Chen's team (Vulture) possibly determined from
loop_with_traffic_light.bag. - Gray crosses are the existing waypoints (reversed order).
- Orange triangle is the stop light position.
- Red square is proposed stop line.
The test site waypoints from pr/72 have been successfully transformed to the simulator map, corresponding with the first traffic light. Required is a rotation of -0.25 radians (to align to the simulator road) followed by a translation in values of x+1130.5 and y+1170.0. Finally, yaw is computed as the atan2 between coordinate pairs. No scaling is required. The result is that the vehicle approaches the first traffic light in the simulator, halts if red at the stop line, then makes an immediate right into the field and back around. We have the option of a continuous loop, or stopping at the final waypoint (in the field). This transformation and operation in the simulator informs the development of a more robust system architecture.
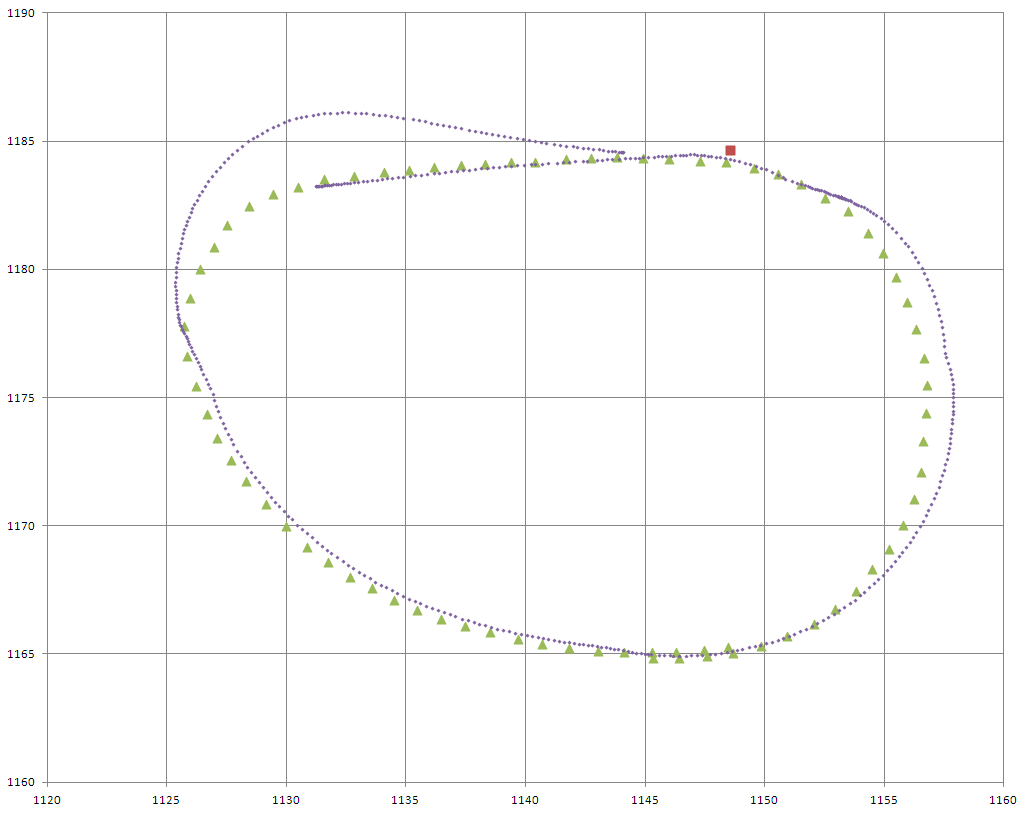
Below is an early test run in the simulator. The green triangles are the transformed waypoints, aligned to the track near the first traffic light. The purple dots are the recorded vehicle positions. The red box is the stop line. The vehicle correctly detects a red traffic light and slows down to the stop line. We can see a waypoint alignment issue at the left-most portion of the oval as the vehicle leaves the field and approaches the road. The car overshoots the middle lane and enters lane 0.
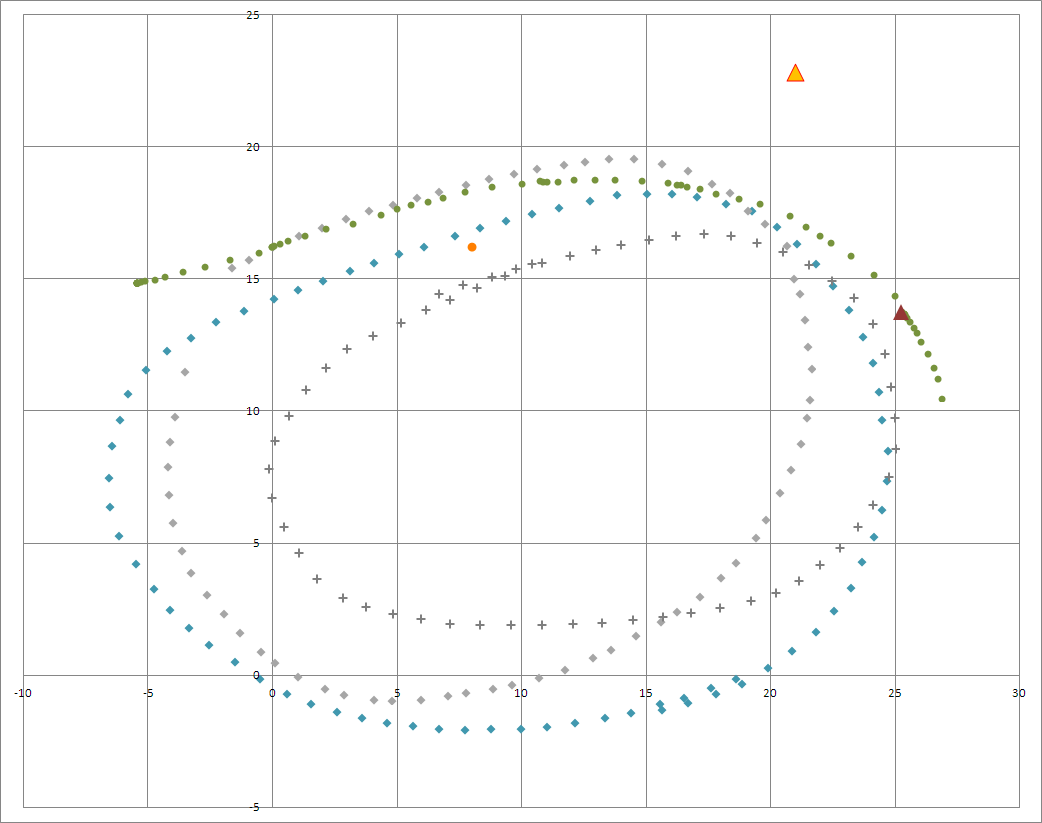
Below is a mapping of the team's first submission at the test site. The green dots are the path which Carla followed. DBW was disabled at the dark red triangle. The code was following the waypoints, but not closely: therefore an alternate method will be employed on the next submission. Here's the video playback captured from the rosbag. Drive-by-wire is engaged at the beginning and was not disengaged until t=0:21s. https://youtu.be/FULa889xIog
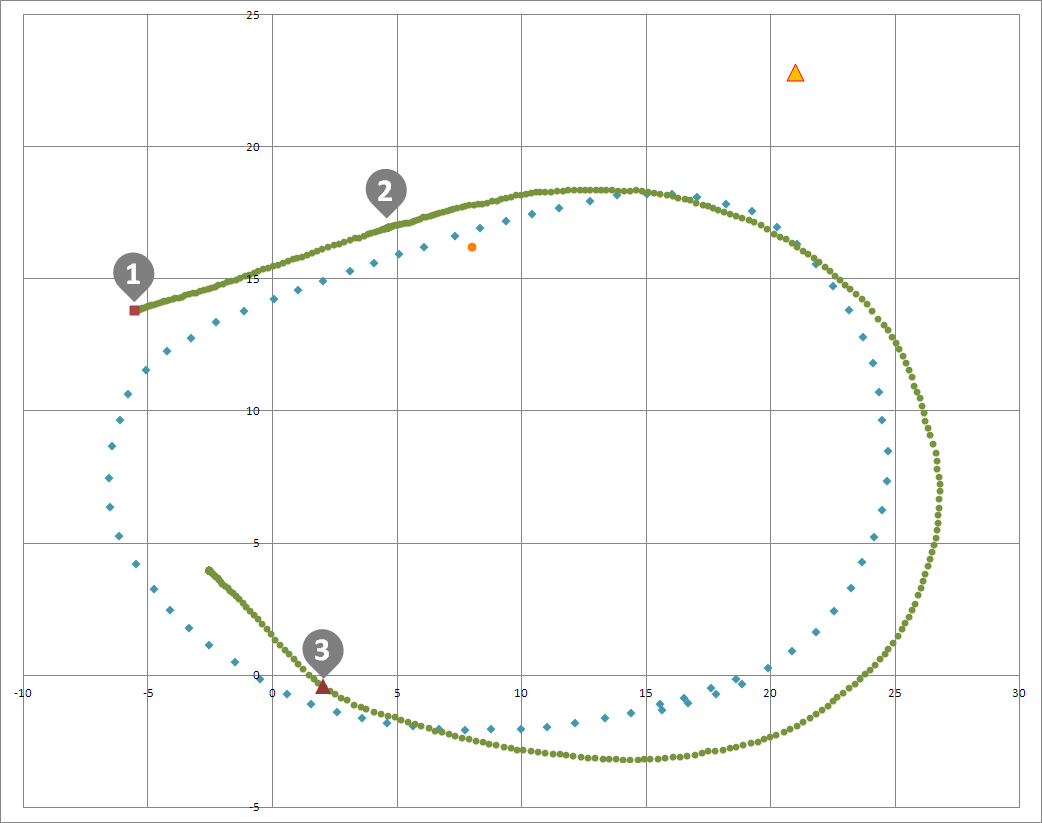
Below is a mapping of the team's second submission for the test site (which is located in Google Maps here). The green dots are the path which Carla followed. The orange triangle is the stop light position and the orange circle is the specified stop point. At marker 1, DBW was enabled. At marker 2, the vehicle stopped successfully for the red light and continued after a change to green. At marker 3, the safety driver disabled DBW using the override on the steering wheel.
Below is a visualization of the lidar point cloud from the team's test run on the autonomous Lincoln.
