In the following we will provide a quick introduction to working with the code featured in our paper on the "Challenges in High-dimensional Reinforcement Learning with Evolution Strategies".
Although most of the following examples are based on relatively canonical choices of optimization problem and evolution strategy, the steps to follow can have minor differences based on a users pick. Please feel free to check out the documented source code or contact us via the email adresses provided in the paper.
- Start out by cloning the repo.
git clone https://github.com/NiMlr/High-Dim-ES-RL.git
cd High-Dim-ES-RL- Install the requirements.
# required
pip3 install --upgrade matplotlib numpy
# required only for the RL experiments
pip3 install --upgrade tensorflow keras gymContents
Running an evolution strategy on a benchmark
Training an Open-AI Gym controller.
1. Within a python file import everything we need.
from optimizers import *
from uhoptimizers import *
from benchmarkfunctions import *
import numpy as np
import matplotlib.pyplot as plt
import matplotlib as mpl
mpl.style.use('seaborn')2. Pick a problem from the following table:
| Function(object) | Module | Description |
|---|---|---|
| BenignEllipse | benchmarkfunctions.py | A moderately conditioned function. |
| BenignEllipseNoisyThres | benchmarkfunctions.py | A moderately conditioned function with additive noise above a certain (function value) threshold. |
| BenignEllipseAddNoise | benchmarkfunctions.py | A stripped down version of the LMMAES implementation. Featuring no CMA or approximation. ES is reasonable to use in extremely high dimension. |
| BenignEllipseMultNoise | benchmarkfunctions.py | An ES for problems in dimensions >> 100 under uncertainty. |
| Ellipse | benchmarkfunctions.py | A stripped down version of the UHLMMAES implementation. Featuring no CMA or respective approximation. ES is reasonable to use in extremely high dimensions. |
| EllipseAddNoise | benchmarkfunctions.py | A badly conditioned function with additive noise of a specified strength applied. |
| EllipseMultNoise | benchmarkfunctions.py | A badly conditioned function with multiplicative noise of a specified strength applied. |
| sphere | benchmarkfunctions.py | The standard spherical quadratic function. |
| SphereAddNoise | benchmarkfunctions.py | The standard spherical quadratic function with additive noise of a specified streght applied. |
| SphereMultNoise | benchmarkfunctions.py | The standard spherical quadratic function with multiplicative noise of a specified streght applied. |
and initialize relevant constants (in case the benchmark function requires these).
# problem dimension
n = 40
# noise amplitude for stochastic function
noiseamp = 1
# get function object
el = EllipseMultNoise(n, noiseamp)3. Grab some optimizer to test from this table:
| Optimizer | Module | Description |
|---|---|---|
| LMMAES | optimizers.py | An ES for problems in dimensions >> 100. |
| MAES | optimizers.py | An ES for problems in dimensions > 100. |
| ES | optimizers.py | A stripped down version of the LMMAES implementation. Featuring no CMA or approximation. ES is reasonable to use in extremely high dimension. |
| UHLMMAES | uhoptimizers.py | An ES for problems in dimensions >> 100 under uncertainty. |
| UHES | uhoptimizers.py | A stripped down version of the UHLMMAES implementation. Featuring no CMA or respective approximation. UHES is reasonable to use in extremely high dimensions under uncertainty. |
and initialize it along with these needed input parameters (see respective optimizer docstring for a detailed description).
# logging
performance_log = []
# set initial pop mean
y0 = np.random.randn(n)/n
# initial step size
step_size = 1./6
# initialize optimizer object
esop = UHLMMAES(y0, step_size, el, function_budget=1e6, threads=8)4. Now we can start the optimization
# the actual optimization routine
termination = False
while termination is False:
# optimization step
evals, solution, termination = esop.step()
# save some useful values
performance_log.append( [evals,np.mean(esop.fd)] )
# print some useful values
esop.report( 'Appr. fit: %f Sigma: %f F-evals: %d\n' %
(np.mean(esop.fd), esop.sigma, evals) )and print the result when done.
plt.plot(np.array(performance_log)[:,0],
np.log10(np.array(performance_log)[:,1]), linewidth=1)
plt.title('UHLMMAES on ellipse with (multiplicative) noise')
plt.xlabel('function evaluations')
plt.ylabel('$log($population mean fitness$)$')
plt.show()When sampling the performance of each of the algorithms on the ellipse with multiplicative noise you could end up with a plot like this.

1. Within a python file import everything we need.
from optimizers import *
from uhoptimizers import *
from applications.control.gymcontrollers import Controller, Models
import numpy as np
import matplotlib.pyplot as plt
import matplotlib as mpl
mpl.style.use('seaborn')2. Pick a neural network controller model from the following table:
| Model | Module | Description |
|---|---|---|
| Models.smallModel | gymcontrollers.py | Primarily used for testing. Neural Net with layers: {input, 10-elu, output-sigmoid} |
| Models.bipedalModel | gymcontrollers.py | Primarily used in experiments of the bipedal walker. Neural Net with layers: {input, 30-elu, 30-elu, 15-elu, 10-elu, output-sigmoid} |
| Models.robopongModel | gymcontrollers.py | Primarily used in experiments of robopong game. Neural Net with layers: {input, 30-elu, 30-elu, 15-elu, 10-elu, output-sigmoid} |
| Models.acrobotModel | gymcontrollers.py | Primarily used in experiments of acrobot game. Neural Net with layers: {input, 30-elu, 30-elu, 10-elu, output-sigmoid} |
Alternatively you can use your own model (make sure it is a valid implementation in the following steps and by checking
out the gymcontrollers.py module).
3. Initialize the controller. The action space size can not always be determined correctly. Be sure to supply it in these cases.
# gym environment name
env = "Acrobot-v1"
episode_length = 1500
controller = Controller(Models.smallModel, env,
episode_length, device='/cpu:0', render=False, force_action_space=3)In order to run controllers on new environments it is mandatory to implement a ActionTransformations method
that transforms the action from the neural net output to the respective gym interface. In some cases this method
might just return its input. Additionally, a list of thresholds (can be empty, if no interference is needed) can be
supplied in the EarlyStop class that feature premature termination of the episode to save runtime. Regarding the
implemented environments this must not be kept in mind. For further inquiry: Check out ``gymcontrollers.py ``.
4. Run the your favorite Evolution Strategy as introduced in the preceding section.
# logging
performance_log = []
# set initial pop mean
y0 = np.abs(np.random.randn(controller.n))/controller.n
# initial step size
step_size = 0.3
# initialize optimizer object
esop = UHLMMAES(y0, step_size, controller.fitness, function_budget=1e4, threads=1)
# the actual optimization routine
termination = False
while termination is False:
# optimization step
evals, solution, termination = esop.step()
# save some useful values
performance_log.append( [evals,np.mean(esop.fd)])
# print some useful values
esop.report( 'Appr. fit: %f Sigma: %f F-evals: %d\n' %
(np.mean(esop.fd), esop.sigma, evals) )Note, that threading is likely not going to work in the current implementation of the gym-controllers (thus set it to 1).
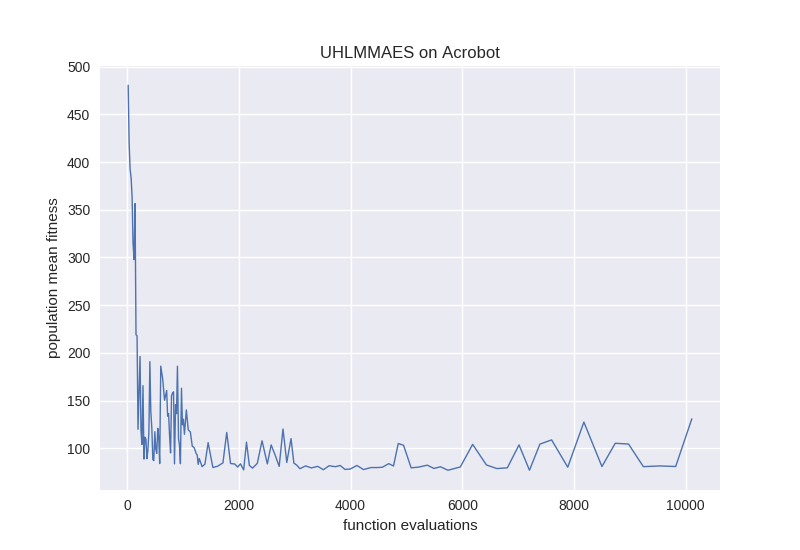
5. Plot and render the result.
controller.render = True
controller.fitness(solution)
plt.plot(np.array(performance_log)[:,0],
np.array(performance_log)[:,1], linewidth=1)
plt.title('UHLMMAES on Acrobot')
plt.xlabel('function evaluations')
plt.ylabel('population mean fitness')
plt.show()