Training TrailNet model
TrailNet DNN has two heads, orientation and translation, so it should be trained in two steps:
- Full training of orientation head on orientation dataset (e.g. Forest Trails or user-collected).
- Fine-tuning translation head on translation dataset (user-collected).
The next steps describe how to do it using NVIDIA DIGITS.
To train orientation head:
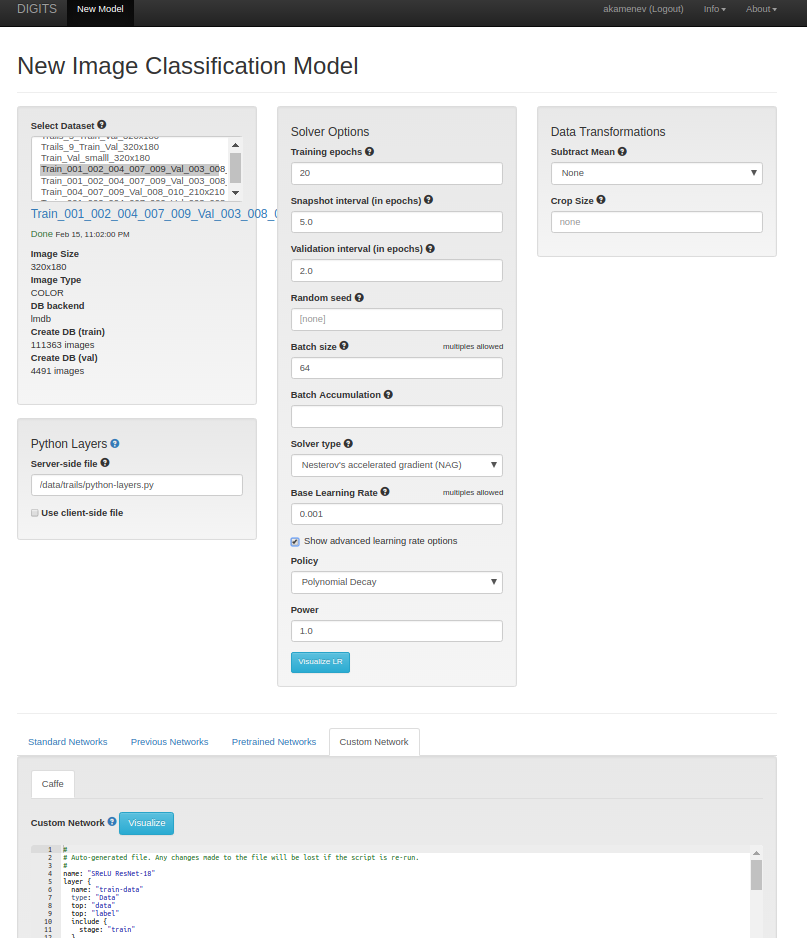
- Create a new Image Classification Model.
- Select proper dataset.
- Set all hyper-parameters values like in the paper (you can experiment with hyper-parameter tuning later).
- Provide full path to Python layers file located at
redtail/models/nets/python-layers.py. - Click on Custom Network tab and paste network definition from
redtail/models/nets/ResNet/srelu-resnet-18.prototxt. - Click Create button and wait until the training is finished.
Example:
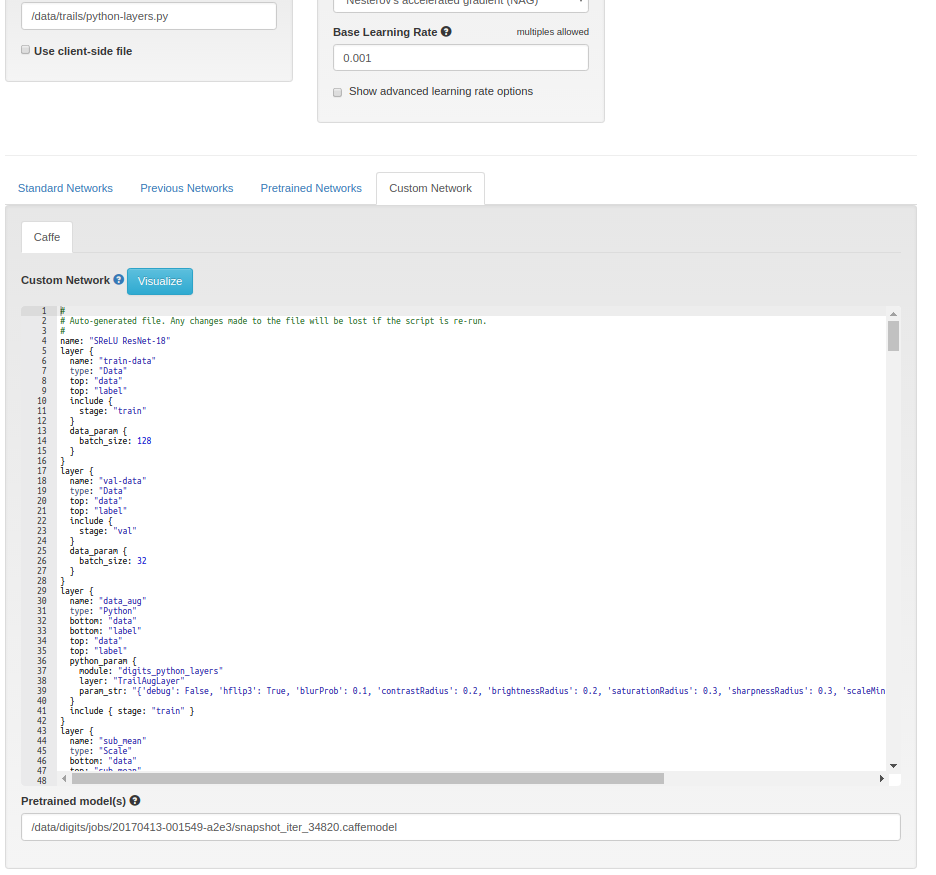
The fine-tuning on translation dataset is very similar to full training with just a couple of differences:
- Use
TrailNet_SResNet-18.prototxtmodel definition file. - Provide full path to pretrained orientation model in Pretrained model(s) field on Custom Network tab.
Example:
Obtaining a good model can be a challenge sometimes. In general, if you train TrailNet with default parameters i.e. those described in the paper and provided Caffe files, you should get a network very similar to the DNN in pretrained directory.
First step is to make sure you get a similar accuracy on validation dataset. Due to entropy term in the TrailNet loss, the validation accuracy will not be very high but it should be at least 82-85%.
To understand what features DNN learns, it is useful to look into activations of various layers in the network. DIGITS provide a simple and convenient way to visualize feature maps via Classify One button on a model page. Make sure to check Show visualizations and statistics checkbox:
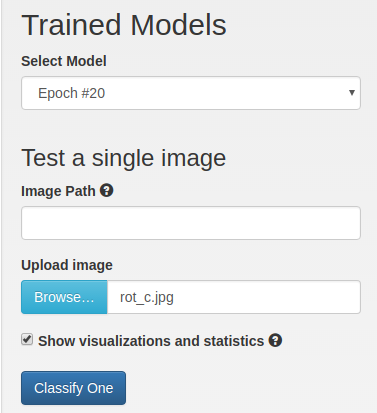
Here is the example of activations from one of the layers of the network:
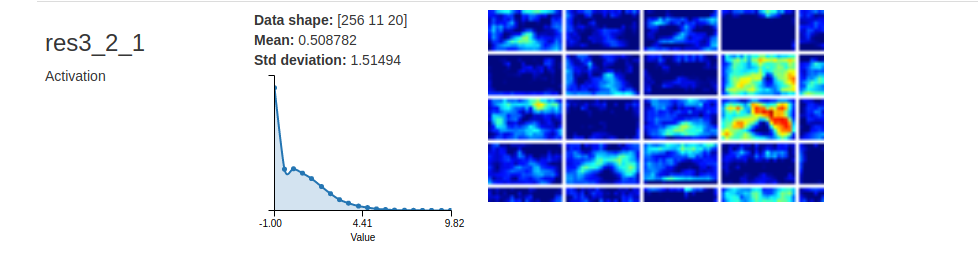
By looking at activations, it is possible to get insight into what network learns (or does not learn) and possibly correct the training process to get a better model.
Another visualization technique is used in our demo videos where the trail is colored in green and surrounding forest in red. Such visualization is based on VisualBackProp paper. For this visualization, we created a deconvolutional neural network which mirrors the TrailNet and back-propagated certain feature maps that represented trail and background features. That is, for every frame in the video, we did a forward pass of the TrailNet and then forward pass of the deconvolutional network which projected activations from TrailNet into original image.