You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
Hi,
I am currently trying to design my own multi-view calibration target. I have a cube (200x200x200) mm with six AprilTag checkerboards attached. Similar to your "ov_cube" example. The detection of the corners is done with the deltille detector. The detection works very well so far.
cube calibration target
corner detection on two sides
About the problem:
I calibrated the intrinsics for my camera with calibrate.m and wanted to solve the poses with get_poses.m afterwards. This works as long as the images only contain one side of the cube. As soon as there are points from two or three sides, the RMS error gets very large (i.e. 30+-30).
I assume that I have defined the pose matrices incorrectly in the .tp file.
I have already tried different pose matrices, but the error does not get smaller.
How exactly did you define the pose matrices of the boards in the .tp file?
And where is the origin of the world coordinate system?
Here is my cube.dsc file and two versions of the .tp file. One .tp file has the 0,0 point of the 0 th coordinate system as orgin and the other the cube edge of the 0 th side.
Hi,
I am currently trying to design my own multi-view calibration target. I have a cube (200x200x200) mm with six AprilTag checkerboards attached. Similar to your "ov_cube" example. The detection of the corners is done with the deltille detector. The detection works very well so far.
cube calibration target
corner detection on two sides
About the problem:
I calibrated the intrinsics for my camera with calibrate.m and wanted to solve the poses with get_poses.m afterwards. This works as long as the images only contain one side of the cube. As soon as there are points from two or three sides, the RMS error gets very large (i.e. 30+-30).
I assume that I have defined the pose matrices incorrectly in the .tp file.
I have already tried different pose matrices, but the error does not get smaller.
How exactly did you define the pose matrices of the boards in the .tp file?
And where is the origin of the world coordinate system?
Here is my cube.dsc file and two versions of the .tp file. One .tp file has the 0,0 point of the 0 th coordinate system as orgin and the other the cube edge of the 0 th side.
cube11x11_v1_tp.txt
cube11x11_v2_tp.txt
cube11x11_dsc.txt
I have tried to visulize your cube and mine. Here are the cubes shown with the corresponding coordinate systems for each board
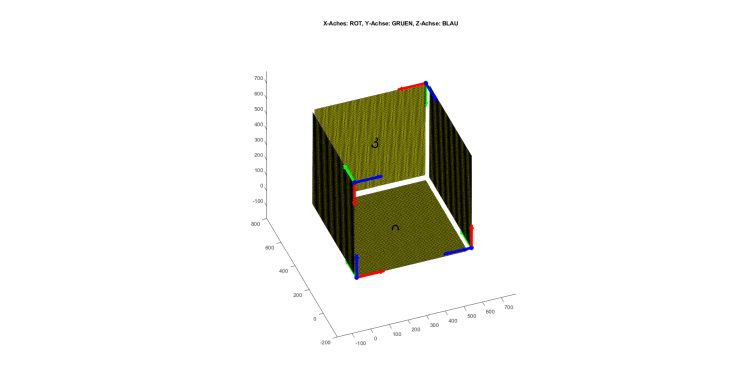
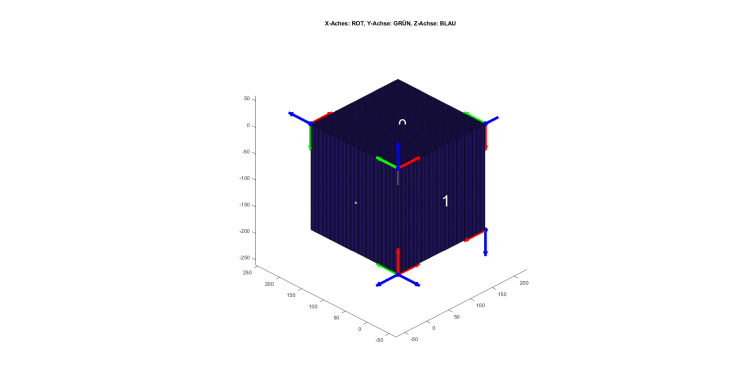
ov_cube
my_cube
I really hope that you can help me. Thank you very much!
The text was updated successfully, but these errors were encountered: