ROS package for simulating the AIRLab cage in Gazebo
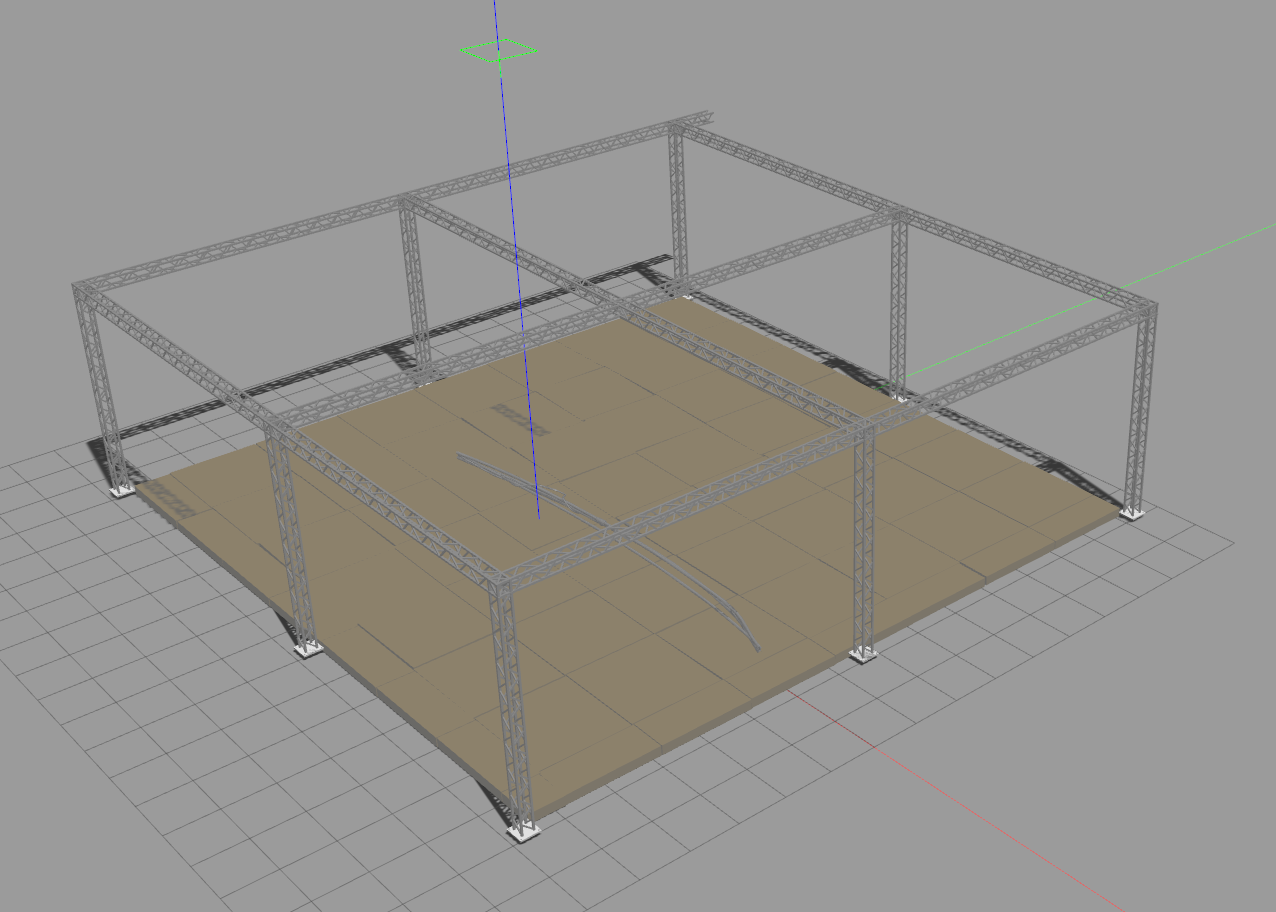
Do you want to have the AIRLab cage in your Gazebo environment? Just launch it as:
roslaunch airlab_gazebo airlab_cage.launch
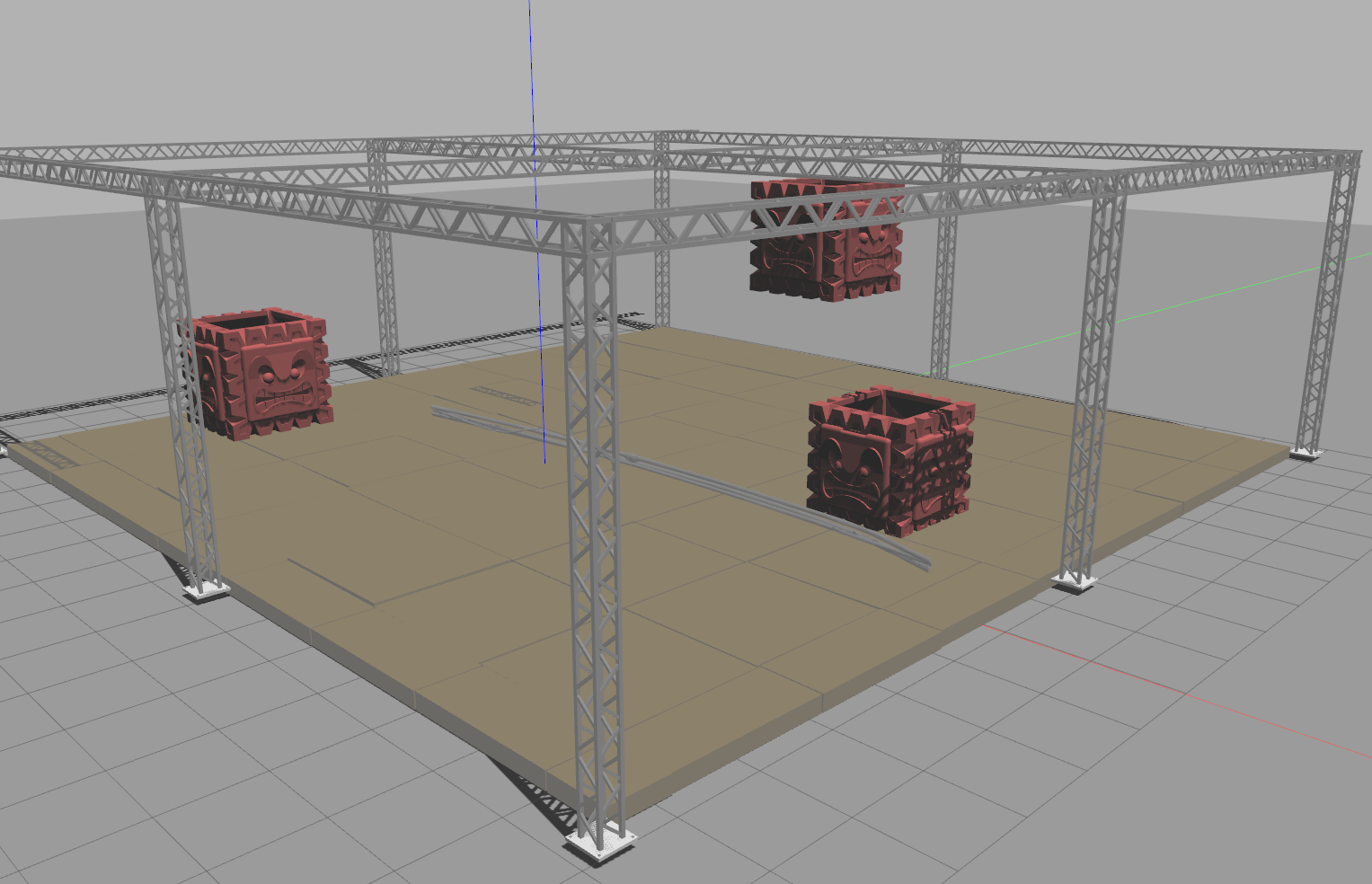
To spawn the obstacles in the cage:
roslaunch airlab_gazebo spawn_obstacles.launch
You can find the proposed waypoints in config/waypoints.yaml