It is only the first step - and my first project here.
I would be very happy to see people "testing" or forking this and creating bigger and better versions ;-)
I'm also grateful for any advice, error correction or recommendations how to proceed...
Also look at pictures in a directory images - it was a hard job to explain how easy principle I use ;-)
What do you need for program testing?
For imperfect testing you can use only Raspberry pi 2 and lowcost webcam, without step motor.
set only:
piCamera=0
webCamera=1
But I recommend faster Raspberry pi 3 and Raspberrypi camera (full HD)
piCamera=1 is deafult setting
Program scannStart.py works in Python 2.7 with Pygame module
How setup ramdisk (temporary files)?
sudo mkdir /home/pi/ramdisk
sudo nano /etc/fstab
and add the line
tmpfs /home/pi/ramdisk tmpfs defaults,size=100M 0 0
simple starting on your Raspberry pi:
sudo python scannStart.py [projectName] [numberOfScann] numberOfScann = rotation steps
What more do you need for scanner testing?
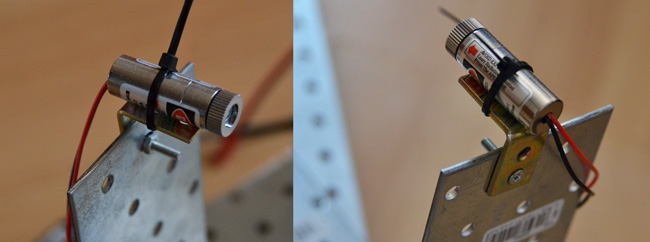
red line laser, voltage source 12V + step motor with driver
I am using Nema and A4988
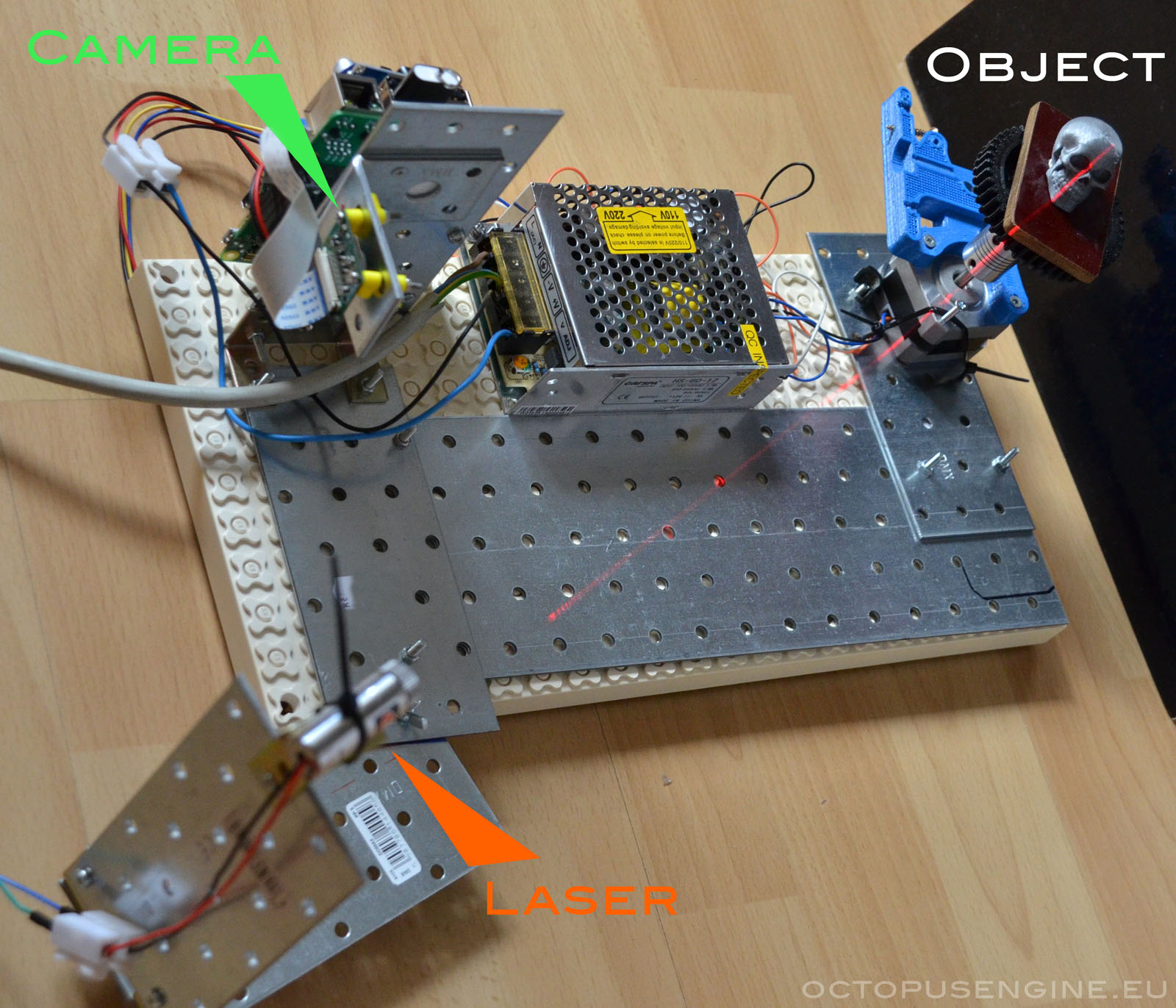
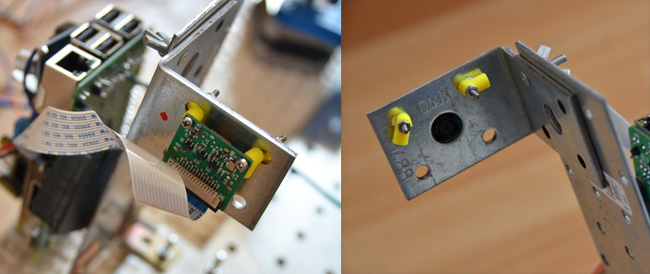
picture of hardware - first alpha edition (with one laser):
schematic:
http://www.octopusengine.eu/2016gal/scanner-schematic.gif
{kind=link}
220V > 12V
Camera and laser detail:
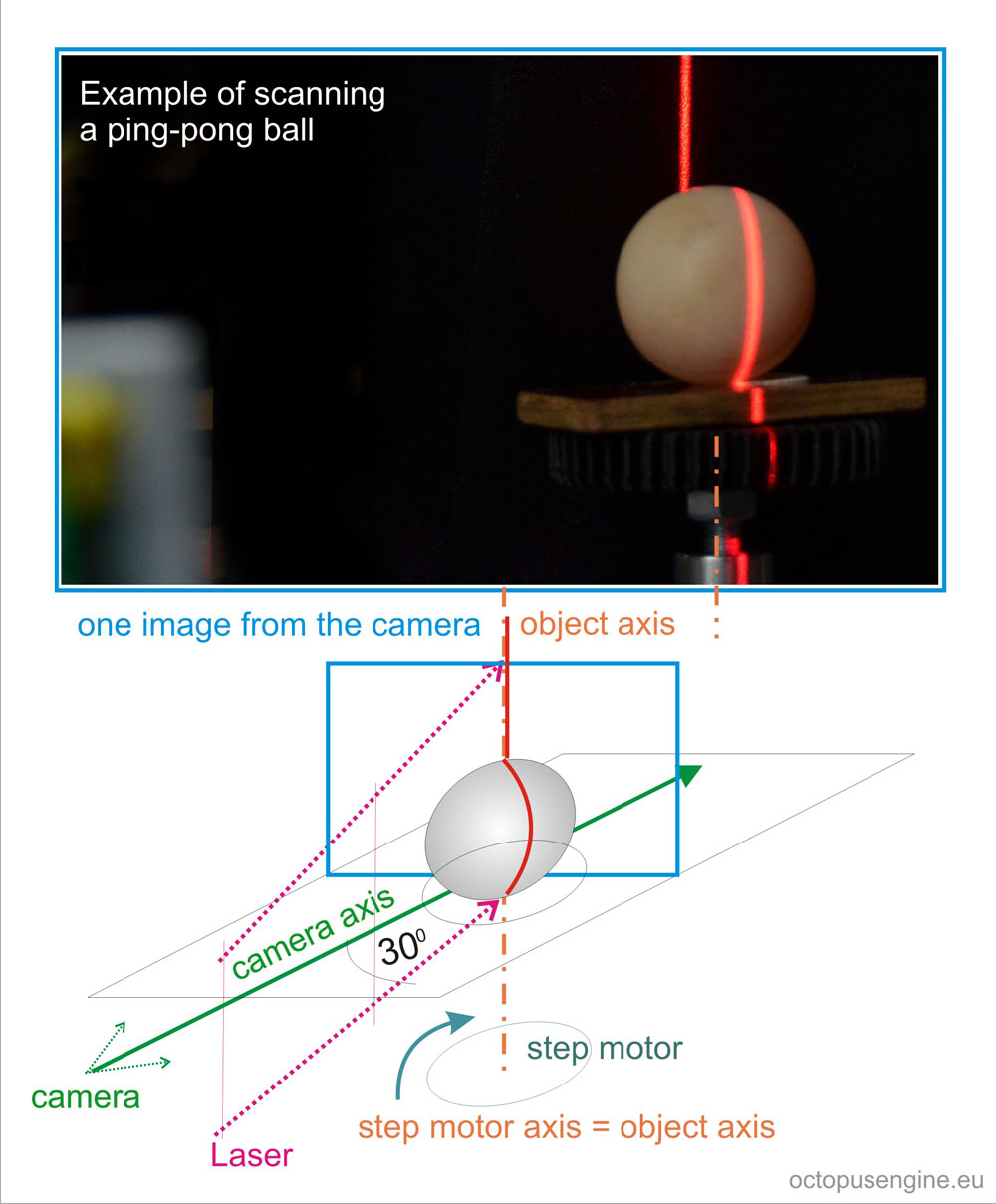
simple idea - how to create points cloud:
loop {
take a picture
recognize red line
transform to xyz
}
example of processing
https://www.instagram.com/p/BEYRg99R7TE/?taken-by=octopusengine
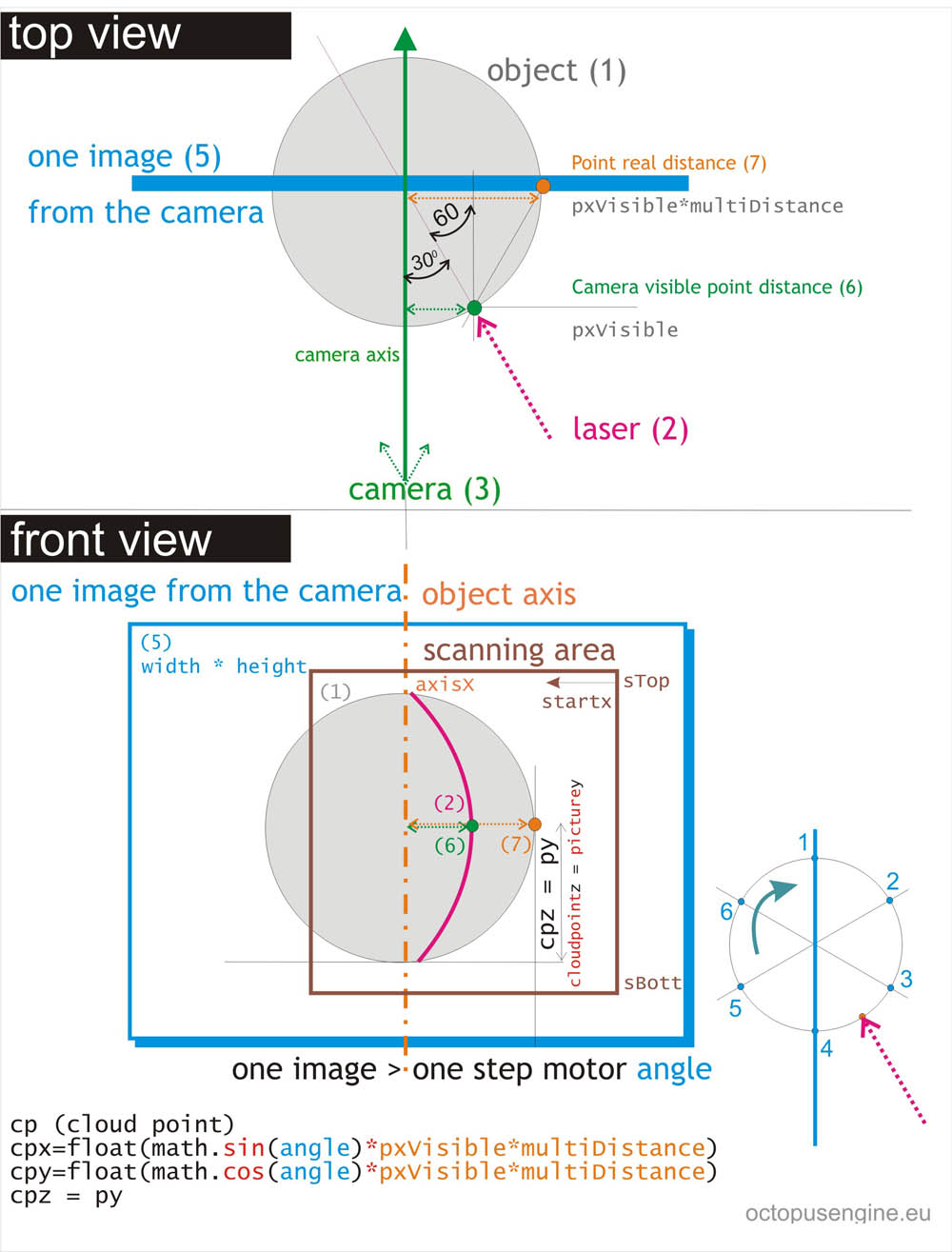
How to convert found a red dot to xyz coordinates?
https://www.mathsisfun.com/polar-cartesian-coordinates.html
When we know a point in Polar Coordinates (r, θ), and we want it in Cartesian Coordinates (x,y) we solve a right triangle with a known long side and angle
Point cloud file xyz is simple "txt" format:
x1 y1 z1
x2 y2 z2
...
xn yn zn
for exaple 5 points:
-14.7657331345 -8.525 177
-10.7387150069 -6.2 178
-1.34233937587 -0.775 179
32.2161450208 18.6 288
41.6125206518 24.025 311
49.666556907 28.675 318
For treatment use program MeshLab
MeshLab is an open source, portable, and extensible system for the processing and editing of unstructured 3D triangular meshes.
The system is aimed to help the processing of the typical not-so-small unstructured models arising in 3D scanning, providing a set of tools for editing, cleaning, healing, inspecting, rendering and converting this kind of meshes.
How import point cloud (yourFile.xyz) to MeshLab software?
Basic step:
File / Import mesh...
2016/04
0.10 first experiment, it works! I was really surprised ;-)
0.20 my first "open source" post for GitHub
0.30 oeHelp, oeGPIO
0.33 filter1 - digital filter Xn=aver(Xn-1,Xn,Xn+1)
2016/08
testing on Raspberry Pi 3
small bug correcting
better user input / GUI (Pygame?)
faster computing / C library or Cython testing
second line laser (FET transistor switching?)
digital filter - RAW data 2D filtering
light detection / daylight.. color of object..
converting to STL
Copyright (c) 2016 Octopusengine.eu