diff --git a/.github/labeler_conf/develop_fetch_labeler.yml b/.github/labeler_conf/develop_fetch_labeler.yml
new file mode 100644
index 0000000000..e0fe1fbe40
--- /dev/null
+++ b/.github/labeler_conf/develop_fetch_labeler.yml
@@ -0,0 +1,2 @@
+develop/fetch:
+ - '**'
diff --git a/.github/workflows/develop_fetch_labeler.yml b/.github/workflows/develop_fetch_labeler.yml
new file mode 100644
index 0000000000..f85a2a913d
--- /dev/null
+++ b/.github/workflows/develop_fetch_labeler.yml
@@ -0,0 +1,16 @@
+name: "Pull Request Labeler for develop/fetch"
+on:
+ pull_request_target:
+ branches:
+ - develop/fetch
+
+jobs:
+ triage:
+ runs-on: ubuntu-latest
+ steps:
+ - uses: actions/labeler@v4.1.0
+ with:
+ configuration-path: ".github/labeler_conf/develop_fetch_labeler.yml"
+ repo-token: "${{ secrets.GITHUB_TOKEN }}"
+ sync-labels: true
+ dot: true
diff --git a/jsk_fetch_robot/README.md b/jsk_fetch_robot/README.md
index 9aab1b786d..51c6144640 100644
--- a/jsk_fetch_robot/README.md
+++ b/jsk_fetch_robot/README.md
@@ -33,26 +33,49 @@
## How to Run
+### Setup Environment (For Remote PC)
-### Setup Environment
-
-First, you need to install ros. For ros indigo, please refer to install guide like [here](http://wiki.ros.org/indigo/Installation/Ubuntu)
+First, you need to install ROS. For ROS melodic, please refer to install guide like [here](http://wiki.ros.org/melodic/Installation/Ubuntu).
+Please make sure your ROS Distribution is indigo, kinetic or melodic.
```bash
mkdir -p catkin_ws/src
cd catkin_ws/src
wstool init .
-wstool set --git jsk-ros-pkg/jsk_robot https://github.com/jsk-ros-pkg/jsk_robot.git -y
-if [[ $ROS_DISTRO =~ ^(indigo|kinetic|melodic)$ ]]; then
- wstool merge -t . https://raw.githubusercontent.com/jsk-ros-pkg/jsk_robot/master/jsk_fetch_robot/jsk_fetch_user.rosinstall.$ROS_DISTRO
-else
- echo "Your ROS distribution $ROS_DISTRO is not supported."
-fi
+wstool set --git jsk-ros-pkg/jsk_robot https://github.com/jsk-ros-pkg/jsk_robot.git -v develop/fetch -y
+wstool merge -t . https://raw.githubusercontent.com/jsk-ros-pkg/jsk_robot/master/jsk_fetch_robot/jsk_fetch_user.rosinstall.$ROS_DISTRO
+
+# (optional): the two lines below are necessary when you want to use roseus_resume
+wstool merge -t . https://gist.githubusercontent.com/Affonso-Gui/25518fef9dc7af0051147bdd2a94b116/raw/e3fcbf4027c876329801a25e32f4a4746200ddae/guiga_system.rosinstall
wstool update -t .
+
+# (optional): the two lines below are necessary when you want to use eus10
+wget https://raw.githubusercontent.com/jsk-ros-pkg/jsk_roseus/master/setup_upstream.sh -O /tmp/setup_upstream.sh
+bash /tmp/setup_upstream.sh -w ../ -p jsk-ros-pkg/geneus -p euslisp/jskeus
+
source /opt/ros/$ROS_DISTRO/setup.bash
rosdep install -y -r --from-paths . --ignore-src
cd ../
+# (optional): if you want to use roseus_resume, build roseus_resume, too.
catkin build fetcheus jsk_fetch_startup
+
+source devel/setup.bash
+```
+
+#### Setup Environment (For Robot Internal PC, only for advanced developer)
+
+```bash
+mkdir -p catkin_ws/src
+cd catkin_ws/src
+wstool init .
+wstool set --git jsk-ros-pkg/jsk_robot https://github.com/jsk-ros-pkg/jsk_robot.git -v develop/fetch -y
+wstool update -t .
+wstool merge -t . jsk-ros-pkg/jsk_robot/jsk_fetch_robot/jsk_fetch.rosinstall.$ROS_DISTRO
+wstool update -t .
+source /opt/ros/$ROS_DISTRO/setup.bash
+rosdep install -y -r --from-paths . --ignore-src
+cd ../
+catkin build
source devel/setup.bash
```
diff --git a/jsk_fetch_robot/fetcheus/fetch-interface.l b/jsk_fetch_robot/fetcheus/fetch-interface.l
index 5dd33840df..238d964a7f 100644
--- a/jsk_fetch_robot/fetcheus/fetch-interface.l
+++ b/jsk_fetch_robot/fetcheus/fetch-interface.l
@@ -22,11 +22,11 @@
(defclass fetch-interface
:super robot-move-base-interface
- :slots (gripper-action moveit-robot fetch-controller-action)
+ :slots (gripper-action moveit-robot fetch-controller-action point-head-action)
)
(defmethod fetch-interface
- (:init (&key (default-collision-object t) &rest args)
+ (:init (&rest args &key (default-collision-object t) &allow-other-keys)
(prog1 (send-super* :init :robot fetch-robot :base-frame-id "base_link" :odom-topic "/odom_combined" :base-controller-action-name nil args)
(send self :add-controller :arm-controller)
(send self :add-controller :torso-controller)
@@ -43,16 +43,18 @@
(setq moveit-robot (instance fetch-robot :init))
(send self :set-moveit-environment (instance fetch-moveit-environment :init :robot moveit-robot))
(when (and (boundp '*co*) default-collision-object)
- (send self :delete-headbox-collision-object)
(send self :delete-keepout-collision-object)
(send self :delete-ground-collision-object)
- (send self :add-headbox-collision-object)
(send self :add-keepout-collision-object)
(send self :add-ground-collision-object))
(setq fetch-controller-action
(instance ros::simple-action-client :init
"/query_controller_states"
robot_controllers_msgs::QueryControllerStatesAction))
+ (setq point-head-action
+ (instance ros::simple-action-client :init
+ "/head_controller/point_head"
+ control_msgs::PointHeadAction))
))
(:state (&rest args)
"We do not have :wait-until-update option for :state :worldcoords.
@@ -131,8 +133,8 @@ Example usage:
(subseq args (+ (position :use-torso args) 2))))))
(return-from :angle-vector (send* self :angle-vector-raw av tm ctype start-time args)))
;;
- (when (not (numberp tm))
- (ros::warn ":angle-vector tm is not a number, use :angle-vector av tm args"))
+ (when (and (not (numberp tm)) (not (eql tm :fast)))
+ (ros::warn ":angle-vector tm is not a number, use :angle-vector av tm args~%"))
(send* self :angle-vector-motion-plan av :ctype ctype :move-arm :rarm :total-time tm
:start-offset-time (if start-offset-time start-offset-time start-time)
:clear-velocities clear-velocities :use-torso use-torso args)))
@@ -205,6 +207,17 @@ Example usage:
(:stop-grasp
(&rest args &key &allow-other-keys)
(send* self :go-grasp :pos 0.1 args))
+ (:point-head (pos &key (frame-id "base_link") (wait t))
+ (let ((goal (instance control_msgs::PointHeadGoal :init)))
+ (send goal :target :header :stamp (ros::time-now))
+ (send goal :target :header :frame_id frame-id)
+ (send goal :target :point (ros::pos->tf-point pos))
+ (if wait
+ (send point-head-action :send-goal goal)
+ (send point-head-action :send-goal-and-wait goal)
+ )
+ )
+ )
(:go-grasp
(&key (pos 0) (effort 50) (wait t))
(when (send self :simulation-modep)
@@ -257,18 +270,6 @@ Example: (send self :gripper :position) => 0.00"
(:delete-workspace ()
(send *co* :delete-attached-object-by-id "workspace")
(send *co* :delete-object-by-id "workspace"))
- (:add-headbox-collision-object ()
- (let ()
- ;; fetch must be :reset-pose when we run this method
- (setq *fetch-headbox* (make-cube 100 201 120))
- (send *fetch-headbox* :move-coords (send robot :head_pan_link_lk :worldcoords)
- (send robot :base_link_lk :worldcoords))
- (send *fetch-headbox* :translate #f(33.75 0 150) (send robot :head_pan_link_lk :worldcoords))
- (send *co* :add-attached-object *fetch-headbox* "head_pan_link"
- :frame_id "head_pan_link"
- :object_id "fetchheadbox")))
- (:delete-headbox-collision-object ()
- (send *co* :delete-attached-object-by-id "fetchheadbox"))
(:add-keepout-collision-object ()
(let ((cube (make-cube 200 350 10))
(keepout (make-cylinder 300 10)))
diff --git a/jsk_fetch_robot/fetcheus/fetch-utils.l b/jsk_fetch_robot/fetcheus/fetch-utils.l
index ea4a1d27e2..67932a47fe 100644
--- a/jsk_fetch_robot/fetcheus/fetch-utils.l
+++ b/jsk_fetch_robot/fetcheus/fetch-utils.l
@@ -5,16 +5,40 @@
(defmethod fetch-robot
(:inverse-kinematics
- (target-coords &rest args &key link-list move-arm (use-torso t) move-target &allow-other-keys)
+ (target-coords &rest args &key link-list move-arm (use-torso t)
+ use-base (start-coords (send self :copy-worldcoords))
+ (base-range (list :min #f(-30 -30 -30)
+ :max #f( 30 30 30)))
+ move-target &allow-other-keys)
(unless move-arm (setq move-arm :rarm))
(unless move-target (setq move-target (send self :rarm :end-coords)))
(unless link-list
(setq link-list (send self :link-list (send move-target :parent)
(unless use-torso (car (send self :rarm))))))
- (send-super* :inverse-kinematics target-coords
- :move-target move-target
- :link-list link-list
- args))
+ (cond
+ (use-base
+ (let ((diff-pos-rot
+ (concatenate float-vector
+ (send start-coords :difference-position self)
+ (send start-coords :difference-rotation self))))
+ (send self :move-to start-coords :world)
+ (with-append-root-joint
+ (ll self link-list
+ :joint-class omniwheel-joint
+ :joint-args base-range)
+ (send (caar ll) :joint :joint-angle
+ (float-vector (elt diff-pos-rot 0)
+ (elt diff-pos-rot 1)
+ (rad2deg (elt diff-pos-rot 5))))
+ (send-super* :inverse-kinematics target-coords
+ :move-target move-target
+ :link-list ll ;; link-list
+ args))))
+ (t
+ (send-super* :inverse-kinematics target-coords
+ :move-target move-target
+ :link-list link-list
+ args))))
(:go-grasp
(&key (pos 0)) ;; pos is between 0.0 and 0.1
(send self :l_gripper_finger_joint :joint-angle (/ (* pos 1000) 2)) ;; m -> mm
diff --git a/jsk_fetch_robot/jsk_fetch.rosinstall.melodic b/jsk_fetch_robot/jsk_fetch.rosinstall.melodic
index 2ecfc0bdfb..5f505796b3 100644
--- a/jsk_fetch_robot/jsk_fetch.rosinstall.melodic
+++ b/jsk_fetch_robot/jsk_fetch.rosinstall.melodic
@@ -5,10 +5,12 @@
# https://github.com/PR2/app_manager/pull/50
# In order to run multiple app_managers in one master, we need this PR
# https://github.com/PR2/app_manager/pull/54
+# This PR add run_name entry to specif node name when we use run entry
+# https://github.com/PR2/app_manager/pull/64
- git:
local-name: PR2/app_manager
- uri: https://github.com/knorth55/app_manager.git
- version: fetch15
+ uri: https://github.com/tkmtnt7000/app_manager.git
+ version: add-run-name-entry-fetch15
# we need this for proximity sensors
- git:
local-name: RoboticMaterials/FA-I-sensor
@@ -70,7 +72,7 @@
local-name: jsk-ros-pkg/jsk_recognition
uri: https://github.com/jsk-ros-pkg/jsk_recognition.git
version: master
-# we need to use the development branch (fetch15 branch in knorth55's fork)
+# we need to use the development branch (develop/fetch branch in jsk-ros-pkg)
# until it is merged to master
- git:
local-name: jsk-ros-pkg/jsk_robot
@@ -185,3 +187,15 @@
local-name: BehaviorTree/BehaviorTree.ROS
uri: https://github.com/BehaviorTree/BehaviorTree.ROS
version: master
+# we need this for smart device ros system
+- git:
+ local-name: sktometometo/smart_device_protocol
+ uri: https://github.com/sktometometo/smart_device_protocol.git
+ version: v0.5.1
+# melodic version of robot_localization causes TF_REPEATED_DATA Errors to noetic client
+# So we have to adopt https://github.com/cra-ros-pkg/robot_localization/pull/595 (Using noetic-devel causes some localization trouble)
+# After https://github.com/cra-ros-pkg/robot_localization/pull/840 has been merged, we can use upstream melodic-devel branch
+- git:
+ local-name: cra-ros-pkg/robot_localization
+ uri: https://github.com/mqcmd196/robot_localization.git
+ version: 2.6.9-suppress
diff --git a/jsk_fetch_robot/jsk_fetch_accessories/finger_tip_collision/finger_tip_collision.STL b/jsk_fetch_robot/jsk_fetch_accessories/finger_tip_collision/finger_tip_collision.STL
new file mode 100644
index 0000000000..ff1925fd32
Binary files /dev/null and b/jsk_fetch_robot/jsk_fetch_accessories/finger_tip_collision/finger_tip_collision.STL differ
diff --git a/jsk_fetch_robot/jsk_fetch_startup/CMakeLists.txt b/jsk_fetch_robot/jsk_fetch_startup/CMakeLists.txt
index be9259dac6..41d435037b 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/CMakeLists.txt
+++ b/jsk_fetch_robot/jsk_fetch_startup/CMakeLists.txt
@@ -10,16 +10,47 @@ endif()
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
-find_package(catkin)
+find_package(catkin REQUIRED COMPONENTS
+ dynamic_reconfigure
+ roscpp
+ std_msgs
+ sensor_msgs
+ geometry_msgs
+ tf
+ tf2
+ tf2_geometry_msgs
+ tf2_ros
+ tf2_eigen
+ tf2_msgs
+)
+find_package(Boost REQUIRED COMPONENTS)
+
+generate_dynamic_reconfigure_options(
+ cfg/TimeSignal.cfg
+)
###################################
## catkin specific configuration ##
###################################
-catkin_package()
+catkin_package(
+ CATKIN_DEPENDS dynamic_reconfigure
+)
catkin_add_env_hooks(99.jsk_fetch_startup SHELLS bash zsh sh
DIRECTORY ${CMAKE_CURRENT_SOURCE_DIR}/env-hooks)
+###########
+## Build ##
+###########
+include_directories(
+ ${catkin_INCLUDE_DIRS}
+ ${Boost_INCLUDE_DIRS}
+)
+add_executable(trashbins_pose_estimator src/trashbins_pose_estimator.cpp)
+target_link_libraries(trashbins_pose_estimator
+ ${catkin_LIBRARIES}
+)
+
#############
## Install ##
#############
@@ -51,8 +82,38 @@ macro(configure_icon_files icol iname)
endif()
endmacro(configure_icon_files)
+macro(configure_dialogflow_hotword_yaml dname)
+ set(FETCH_NAME ${dname})
+ if (${FETCH_NAME} STREQUAL "fetch15")
+ set(ROBOT_NICKNAME_KANA "ヘンゼル")
+ set(ROBOT_NICKNAME_HIRA "へんぜる")
+ configure_file(${CMAKE_CURRENT_SOURCE_DIR}/config/dialogflow_hotword.yaml.in
+ ${CMAKE_CURRENT_SOURCE_DIR}/config/${FETCH_NAME}_dialogflow_hotword.yaml)
+ elseif (${FETCH_NAME} STREQUAL "fetch1075")
+ set(ROBOT_NICKNAME_KANA "グレーテル")
+ set(ROBOT_NICKNAME_HIRA "ぐれーてる")
+ configure_file(${CMAKE_CURRENT_SOURCE_DIR}/config/dialogflow_hotword.yaml.in
+ ${CMAKE_CURRENT_SOURCE_DIR}/config/${FETCH_NAME}_dialogflow_hotword.yaml)
+ endif()
+endmacro(configure_dialogflow_hotword_yaml)
+
+macro(configure_email_topic_yaml rname)
+ cmake_host_system_information(RESULT FETCH_NAME QUERY HOSTNAME)
+ if (${FETCH_NAME} MATCHES ^${rname})
+ set(RECEIVER_MAIL ${rname})
+ set(EMAIL_SENDER_ADDRESS ${FETCH_NAME}@jsk.imi.i.u-tokyo.ac.jp)
+ set(EMAIL_RECEIVER_ADDRESS ${RECEIVER_MAIL}@jsk.imi.i.u-tokyo.ac.jp)
+ configure_file(${CMAKE_CURRENT_SOURCE_DIR}/config/email_topic.yaml.in
+ ${CMAKE_CURRENT_SOURCE_DIR}/config/${FETCH_NAME}_email_topic.yaml)
+ endif()
+endmacro(configure_email_topic_yaml)
+
+
configure_icon_files(blue fetch15)
configure_icon_files(red fetch1075)
+configure_dialogflow_hotword_yaml(fetch15)
+configure_dialogflow_hotword_yaml(fetch1075)
+configure_email_topic_yaml(fetch)
#############
diff --git a/jsk_fetch_robot/jsk_fetch_startup/README.md b/jsk_fetch_robot/jsk_fetch_startup/README.md
index a509050a34..d23cac2634 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/README.md
+++ b/jsk_fetch_robot/jsk_fetch_startup/README.md
@@ -1,5 +1,28 @@
# jsk_fetch_startup
+- [jsk_fetch_startup](#jsk_fetch_startup)
+ - [SetUp (Running following commands in the first time)](#setup-running-following-commands-in-the-first-time)
+ - [Install a udev rule](#install-a-udev-rule)
+ - [For realsense](#for-realsense)
+ - [supervisor](#supervisor)
+ - [cron](#cron)
+ - [mongodb](#mongodb)
+ - [Teleoperation](#teleoperation)
+ - [Maintenance](#maintenance)
+ - [re-roslaunch jsk_fetch_startup fetch_bringup.launch](#re-roslaunch-jsk_fetch_startup-fetch_bringuplaunch)
+ - [re-roslaunch fetch_bringup fetch.launch](#re-roslaunch-fetch_bringup-fetchlaunch)
+ - [Clock Synchronization](#clock-synchronization)
+ - [Network](#network)
+ - [General description](#general-description)
+ - [Case description](#case-description)
+ - [Access point](#access-point)
+ - [Log](#log)
+ - [Apps](#apps)
+ - [Note](#note)
+ - [Add fetch to rwt_app_chooser](#add-fetch-to-rwt_app_chooser)
+ - [Execute demos](#execute-demos)
+ - [Administration](#administration)
+
## SetUp (Running following commands in the first time)
### Install a udev rule
@@ -7,80 +30,137 @@
rosrun jsk_fetch_startup install_udev.sh
```
-#### For realsense
-udev rule have to be manually installed according to [this issue](https://github.com/IntelRealSense/realsense-ros/issues/1426) when using realsense-ros from ROS repository.
+### For realsense
+
+Before start this, remove `librealsense2` and `realsense2-ros` from ROS repository and set not to be installed.
+
+```bash
+sudo apt purge ros-melodic-librealsense2* ros-melodic-realsense*
+sudo apt-mark hold ros-melodic-librealsense2 ros-melodic-realsense2-camera
+```
+
+After that, please add Intel repository and install `librealsense2` packages. (see [this page](https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md#installing-the-packages))
+
+```bash
+sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
+sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
+sudo apt install librealsense2=2.45.0-0~realsense0.4551
+sudo apt install librealsense2-dev=2.45.0-0~realsense0.4551
+sudo apt-mark hold librealsense2 librealsense2-dev
+```
+
+### Install config.bash
+
+JSK fetch system uses some enviroment variables. To set them, copy `config.bash` to `/var/lib/robot/config.bash` and modify it.
+
+```bash
+roscd jsk_fetch_startup
+sudo cp config/config.bash /var/lib/robot/config.bash
+```
+
+descriptions of each variable are below.
+
+- `USE_BASE_CAMERA_MOUNT`
+ + Flag for robot model
+- `USE_HEAD_BOX`
+ + Flag for robot model
+- `USE_HEAD_L515`
+ + Flag for robot model
+- `USE_INSTA360_STAND`
+ + Flag for robot model
+- `RS_SERIAL_NO_T265`
+ + Serial number of Realsense T265 for visual odometry.
+ + realsense will not be launched when this is blank.
+- `RS_SERIAL_NO_D435_FRONTRIGHT`
+ + Serial number of Realsense D435 on the base
+ + realsense will not be launched when this is blank.
+- `RS_SERIAL_NO_D435_FRONTLEFT`
+ + Serial number of Realsense D435 on the base
+ + realsense will not be launched when this is blank.
+- `RS_SERIAL_NO_L515_HEAD`
+ + Serial number of Realsense L515 on the head
+ + realsense will not be launched when this is blank.
+- `NETWORK_DEFAULT_WIFI_INTERFACE`
+ + Wi-Fi network interface for network management scripts (e.g. `network_monitor.py` and `network-log-wifi.sh`)
+- `NETWORK_DEFAULT_PROFILE_ID`
+ + Network manager profile ID for network management scripts (`network_monitor.py`)
++ `NETWORK_DEFAULT_ROS_INTERFACE`
+ + Network interface or IP address or hostname which is used for ROS connection.
+ + `rossetclient $NETWORK_DEFAULT_ROS_INTERFACE` is executed to set `ROS_IP` or `ROS_HOSTNAME`.
+
+It is also recommended to add lines below to each users's bashrc in the robot PC.
```bash
-wget https://github.com/IntelRealSense/librealsense/raw/master/config/99-realsense-libusb.rules
-sudo mv 99-realsense-libusb.rules /etc/udev/rules.d/
-sudo udevadm control --reload-rules && sudo udevadm trigger
+source /var/lib/robot/config.bash
+rossetmaster localhost
+rossetip $NETWORK_DEFAULT_ROS_INTERFACE
```
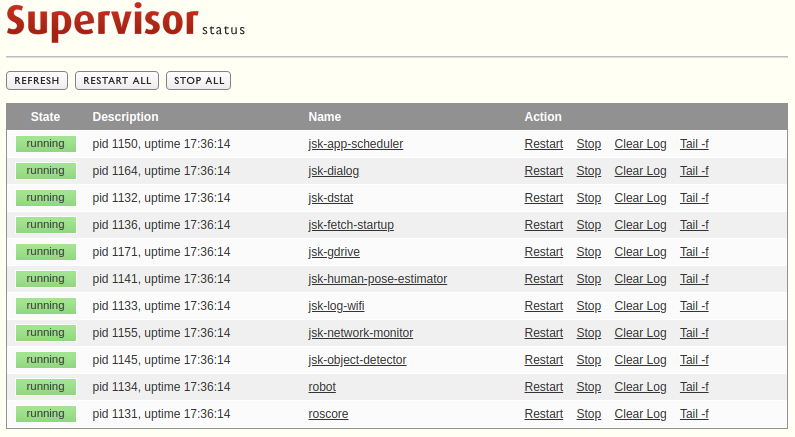
### supervisor
+
Important jobs for fetch operation are managed by supervisor.
Here is a list of jobs that are managed by supervisor.
- - roscore
+- roscore
Start roscore
- - robot
+- robot
Launch Minimum ROS programs to run fetch
- - jsk-fetch-startup
+- jsk-fetch-startup
Launch ROS programs extended by JSK
- - jsk-network-monitor
+- jsk-network-monitor
Restart the network manager automatically if ping does not work.
- - jsk-log-wifi
+- jsk-log-wifi
Monitor network condition
- - jsk-app-scheduler
+- jsk-app-scheduler
Scheduler to launch [app](https://github.com/knorth55/app_manager_utils/tree/master/app_scheduler) at a fixed time
- - jsk-object-detector
+- jsk-object-detector
Object detection using fetch's head camera and [coral_usb_ros](https://github.com/knorth55/coral_usb_ros)
- - jsk-panorama-object-detector:
+- jsk-panorama-object-detector:
Object detection using fetch's 360 camera and [coral_usb_ros](https://github.com/knorth55/coral_usb_ros)
- - jsk-human-pose-estimator
+- jsk-human-pose-estimator
Human pose estimation using fetch's head camera and [coral_usb_ros](https://github.com/knorth55/coral_usb_ros)
- - jsk-panorama-human-pose-estimator
+- jsk-panorama-human-pose-estimator
Human pose estimation using fetch's 360 camera and [coral_usb_ros](https://github.com/knorth55/coral_usb_ros)
- - jsk-dialog
+- jsk-dialog
Launch [dialogflow_task_exective](https://github.com/jsk-ros-pkg/jsk_3rdparty/tree/master/dialogflow_task_executive)
- - jsk-gdrive
+- jsk-gdrive
Launch [app](https://github.com/knorth55/app_manager_utils/tree/master/app_uploader) to upload data to Goole Drive
- - jsk-dstat
+- jsk-dstat
Monitor fetch's resource using dstat command
- - jsk-lifelog
+- jsk-lifelog
Launch program to save fetch's [lifelog](https://github.com/jsk-ros-pkg/jsk_robot/tree/master/jsk_robot_common/jsk_robot_startup/lifelog)
-
Install supervisor config files. e.g. `robot.conf`, `jsk_fetch_startup.conf` ...
-```
+```bash
su -c 'rosrun jsk_fetch_startup install_supervisor.sh'
```
@@ -90,17 +170,17 @@ Previously, upstart was used, but it has been moved to supervisor. This is becau
-
### cron
+
Install cron jobs for root user and fetch user. e.g. `shutdown`, `update_workspace`.
-```
+```bash
su -c 'rosrun jsk_fetch_startup install_cron.sh'
```
### mongodb
-```
+```bash
sudo mkdir -p /var/lib/robot/mongodb_store/
# to see the db items from http://lcoalhost/rockmongo
@@ -112,11 +192,7 @@ sudo mv rockmongo-1.1.7 /var/www/html/rockmongo
# $MONGO["servers"][$i]["control_auth"] = false; // true;//enable control users, works only if mongo_auth=false
```
-### Coral Edge TPU
-Create ROS workspace for Coral Edge TPU. Please see:
-https://github.com/knorth55/coral_usb_ros
-
-### Teleoperation
+## Teleoperation
For the JSK safe teleop system, please see [data flow diagram of safe_teleop.launch](https://github.com/jsk-ros-pkg/jsk_robot/tree/master/jsk_robot_common/jsk_robot_startup#launchsafe_teleoplaunch)
@@ -128,19 +204,22 @@ The numbers assigned to the joystick are as follows.
## Maintenance
### re-roslaunch jsk_fetch_startup fetch_bringup.launch
-```
+
+```bash
sudo supervisorctl restart jsk-fetch-startup
```
### re-roslaunch fetch_bringup fetch.launch
-```
+
+```bash
sudo supervisorctl restart robot
```
### [Clock Synchronization](https://github.com/fetchrobotics/docs/blob/0c1c63ab47952063bf60280e74b4ff3ae07fd914/source/computer.rst)
install `chrony` and add ```server `gethostip -d fetch15` offline minpoll 8``` to /etc/chrony/chrony.conf, restart chronyd by `sudo /etc/init.d/chrony restart` and wait for few seconds, if you get
-```
+
+```bash
$ chronyc tracking
Reference ID : 133.11.216.145 (fetch15.jsk.imi.i.u-tokyo.ac.jp)
Stratum : 4
@@ -156,21 +235,22 @@ Root dispersion : 0.018803 seconds
Update interval : 2.1 seconds
Leap status : Normal
```
-it works, if you get `127.127.1.1` for `Reference ID`, something wrong
+it works, if you get `127.127.1.1` for `Reference ID`, something wrong
## Network
+
### General description
+
Fetch has wired and wireless network connections.
If we use both of wired and wireless connections as DHCP, DNS holds two IP addresses for same hostname (fetch15 in this case).
This cause problems in network such as ROS communication or ssh connection.
-The solution we take now (2016/11/01) is using wired connection as static IP.
-By doing so, DNS holds only one IP adress (for wireless connection) for fetch hostname.
-
### Case description
+
If you see the following result, it is OK.
-```
+
+```bash
$ nslookup fetch15.jsk.imi.i.u-tokyo.ac.jp
Server: 127.0.1.1
Address: 127.0.1.1#53
@@ -180,24 +260,70 @@ Address: 133.11.216.145
```
If two or more IP addresses apper, something is wrong.
-Please connect display, open a window of network manager, and check that wired connection uses static IP.
+Please connect display, open a window of network manager.
-### Access point
-Define access point setting, such as ssid:
-```
+### Network configuration
+
+Ubuntu 18.04 uses [NetworkManager](https://wiki.archlinux.jp/index.php/NetworkManager) for network configuration.
+Network manager's profiles are in `/etc/NetworkManager/system-connections`.
+
+```bash
cd /etc/NetworkManager/system-connections
```
-### Log
+You can also see profiles with `nmcli`, `nmtui` or `nm-connection-editor` (GUI) command.
+
+To see available connection profiles.
+
+```bash
+fetch@fetch1075:~$ nmcli connection
+NAME UUID TYPE DEVICE
+netplan-eth1 433e484b-3493-3640-9368-395c0c752304 ethernet eth1
+sanshiro-73B2 1f0f9db6-e448-41ef-9d27-e1ed4e48a4f5 wifi wlan1
+Wired connection 1 eb557bda-e1bf-3ab7-89e9-1f839cd6b88a ethernet --
+fetch1075-hotspot b85c6a8f-9d28-4cf3-95a0-6dc37229863d wifi --
+sanshiro-outside d7ee2165-c93a-4050-862d-d0c381a546ab wifi --
+fetch@fetch1075:~$ nmcli c show sanshiro-73B2
+```
+
+To activate some connection.
+
+```bash
+fetch@fetch1075:~$ sudo nmcli c up sanshiro-outside
+[sudo] password for fetch:
+Connection successfully activated (D-Bus active path: /org/freedesktop/NetworkManager/ActiveConnection/5)
+fetch@fetch1075:~$ sudo nmcli c up sanshiro-73B2
+Connection successfully activated (D-Bus active path: /org/freedesktop/NetworkManager/ActiveConnection/6)
+```
+
+To edit connection profiles, use `nmtui` or `nm-connection-editor`
+
+### Default connection profiles
+
+fetch15 and fetch1075 has `sanshiro-73B2` and `sanshiro-outside` connections by default. (If not, please make them)
+
+- `sanshiro-73B2` (Connect `sanshiro` with fixed BSSID)
+- `sanshiro-outside` (Connect `sanshiro` without fixed BSSID)
+
+By default, `sanshiro-73B2` is activated for stable connection in 73B2.
+If you want to use fetch outside of 73B2, it is recommended to activate `sanshiro-outside`.
+
+```bash
+sudo nmcli c up sanshiro-outside
+```
+
+## Log
tmuxinator makes it easy to check the important logs of fetch from command line. Currently, it shows the logs of the supervisor jobs.
Install tmuxinator config.
+
```bash
rosrun jsk_fetch_startup install_tmuxinator.sh
```
Show logs
+
```bash
tmuxinator log
```
@@ -234,6 +360,7 @@ tmuxinator log
You can not run this on Firefox. Please use Google Chrome.
### Add fetch to rwt_app_chooser
+
1. Access [http://tork-a.github.io/visualization_rwt/rwt_app_chooser](http://tork-a.github.io/visualization_rwt/rwt_app_chooser "website").
- Be careful to access the site via http, not https, to to enable websocket communication.
- Modern browsers may automatically redirect from http to https.
@@ -244,7 +371,27 @@ You can not run this on Firefox. Please use Google Chrome.
1. Click `ADD ROBOT` button
### Execute demos
+
1. Click `fetch15` at `Select Robot` window
1. Select task which are shown with icons.
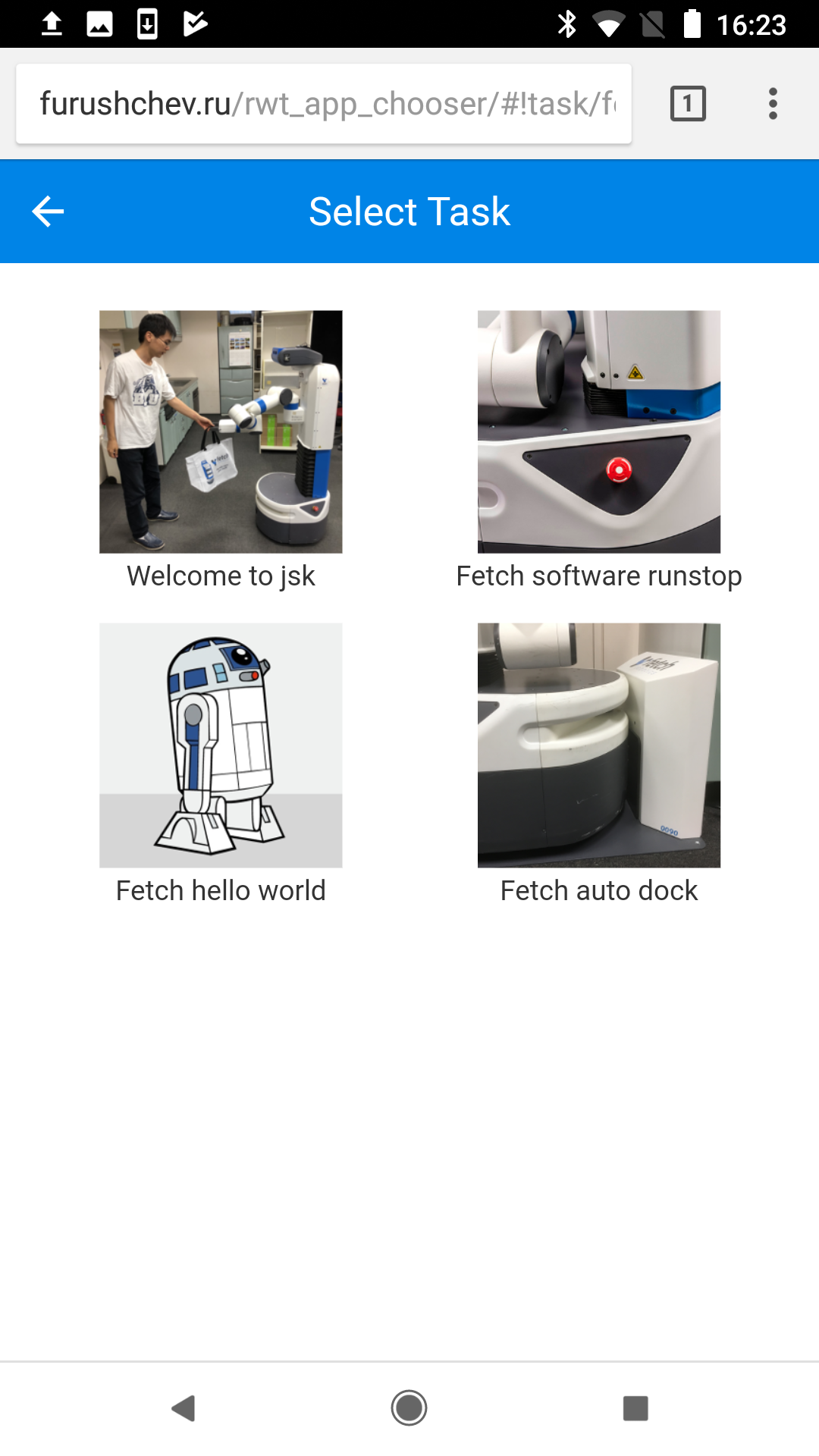
+
+## Administration
+
+- 2016/10/26 add `allow 133.11.216/8` to /etc/chrony/chrony.conf
+- 2018/08/26 add `0 10 * * 1-5 /home/fetch/ros/indigo_robot/devel/env.sh rosservice call /fetch15/start_app "name: 'jsk_fetch_startup/go_to_kitchen'"` to crontab
+ - `fetch` goes to 73B2 kitchen at 10:00 AM from Monday to Friday.
+- 2019/04/19: add `fetch` user in `pulse-access` group.
+- 2019/04/19: set `start on runlevel [2345]` in `/etc/init/pulseaudio.conf`.
+ - this modification is needed for starting `pulseaudio` in boot.
+ - `pulseaudio` is required to register USB speaker on head in boot.
+- 2019/04/19: set `env DISALLOW_MODULE_LOADING=0` in `/etc/init/pulseaudio.conf`.
+ - this modification is needed for overriding default speaker setting in `/etc/init/jsk-fetch-startup.conf`
+ - overriding default speaker setting to use USB speaker on head is done with `pactl set-default-sink $AUDIO_DEVICE` in `/etc/init/jsk-fetch-startup.conf`
+- 2019/04/19: launch `jsk_fetch_startup/fetch_bringup.launch` by `fetch` user in `/etc/init/jsk-fetch-startup.conf`
+ - some nodes save files by `fetch` user
+- 2019/04/19: add arg `launch_teleop` in `/etc/ros/indigo/robot.launch`.
+ - We sent PR to upstream [fetchrobotics/fetch_robots PR#40](https://github.com/fetchrobotics/fetch_robots/pull/40).
+- 2019/04/19: run `/etc/ros/indigo/robot.launch` with `arg` `launch_teleop:=false`.
+ - `teleop` in `/etc/ros/indigo/robot.launch` nodes were conflicted with `teleop` nodes in [jsk_fetch_startup/launch/fetch_teleop.xml](https://github.com/jsk-ros-pkg/jsk_robot/blob/master/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_teleop.xml)
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/auto_dock/auto_dock.app b/jsk_fetch_robot/jsk_fetch_startup/apps/auto_dock/auto_dock.app
index d628e8e57a..fd09baa3eb 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/apps/auto_dock/auto_dock.app
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/auto_dock/auto_dock.app
@@ -1,5 +1,5 @@
display: Fetch auto dock
platform: fetch
-launch: jsk_fetch_startup/auto_dock.xml
+run: jsk_fetch_startup/auto-dock.l
interface: jsk_fetch_startup/auto_dock.interface
icon: jsk_fetch_startup/auto_dock.png
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/call_k_okada/call_k_okada.app b/jsk_fetch_robot/jsk_fetch_startup/apps/call_k_okada/call_k_okada.app
index acfcb25162..4577ac55ae 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/apps/call_k_okada/call_k_okada.app
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/call_k_okada/call_k_okada.app
@@ -1,5 +1,5 @@
display: Call k-okada
platform: fetch
-launch: jsk_fetch_startup/call_k_okada.xml
+run: jsk_fetch_startup/call-k-okada.l
interface: jsk_fetch_startup/call_k_okada.interface
icon: jsk_fetch_startup/call_k_okada.png
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/dock/dock.app b/jsk_fetch_robot/jsk_fetch_startup/apps/dock/dock.app
index 916d8fb34c..6c034bd9aa 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/apps/dock/dock.app
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/dock/dock.app
@@ -1,5 +1,5 @@
display: Fetch dock
platform: fetch
-launch: jsk_fetch_startup/dock.xml
+run: jsk_fetch_startup/dock.l
interface: jsk_fetch_startup/dock.interface
icon: jsk_fetch_startup/dock.png
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/fetch_apps.installed b/jsk_fetch_robot/jsk_fetch_startup/apps/fetch_apps.installed
index e47207b282..c1bad9ee46 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/apps/fetch_apps.installed
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/fetch_apps.installed
@@ -29,3 +29,9 @@ apps:
display: light on
- app: jsk_fetch_startup/light_off
display: light off
+ - app: jsk_fetch_startup/upload_notification
+ display: Upload notification
+ - app: jsk_fetch_startup/plug_spot_power_connector
+ display: Plug Spot Power Connector
+ - app: jsk_fetch_startup/unplug_spot_power_connector
+ display: Unplug Spot Power Connector
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/go_to_kitchen/go_to_kitchen.app b/jsk_fetch_robot/jsk_fetch_startup/apps/go_to_kitchen/go_to_kitchen.app
index e81df30945..b5a69c054e 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/apps/go_to_kitchen/go_to_kitchen.app
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/go_to_kitchen/go_to_kitchen.app
@@ -3,53 +3,18 @@ platform: fetch
launch: jsk_fetch_startup/go_to_kitchen.xml
interface: jsk_fetch_startup/go_to_kitchen.interface
icon: jsk_fetch_startup/go_to_kitchen.png
+timeout: 1200
plugins:
- name: service_notification_saver_plugin
type: app_notification_saver/service_notification_saver
- name: smach_notification_saver_plugin
type: app_notification_saver/smach_notification_saver
- - name: head_camera_video_recorder_plugin
- type: app_recorder/audio_video_recorder_plugin
- launch_args:
- video_path: /tmp
- video_title: go_to_kitchen_head_camera.avi
- audio_topic_name: /audio
- audio_channels: 1
- audio_sample_rate: 16000
- audio_format: wave
- audio_sample_format: S16LE
- video_topic_name: /head_camera/rgb/image_rect_color
- video_height: 480
- video_width: 640
- video_framerate: 30
- video_encoding: RGB
- - name: object_detection_video_recorder_plugin
- type: app_recorder/video_recorder_plugin
- launch_args:
- video_path: /tmp
- video_title: go_to_kitchen_object_detection.avi
- video_topic_name: /edgetpu_object_detector_visualization/output
- video_fps: 5.0
- - name: panorama_video_recorder_plugin
- type: app_recorder/video_recorder_plugin
- launch_args:
- video_path: /tmp
- video_title: go_to_kitchen_panorama.avi
- video_topic_name: /dual_fisheye_to_panorama/output
- video_fps: 1.0
- - name: respeaker_audio_recorder_plugin
- type: app_recorder/audio_recorder_plugin
- launch_args:
- audio_path: /tmp
- audio_title: go_to_kitchen_audio.wav
- audio_topic_name: /audio
- audio_format: wave
- name: rosbag_recorder_plugin
type: app_recorder/rosbag_recorder_plugin
launch_args:
rosbag_path: /tmp
rosbag_title: go_to_kitchen_rosbag.bag
- compress: true
+ compress: false
rosbag_topic_names:
- /rosout
- /tf
@@ -70,16 +35,74 @@ plugins:
- /move_base/global_costmap/costmap
- /particlecloud
- /base_scan/throttled
+ - /dual_fisheye_to_panorama/quater/output/compressed
+ - /edgetpu_object_detector/output/image/compressed
- /head_camera/rgb/throttled/camera_info
- /head_camera/depth_registered/throttled/camera_info
- /head_camera/rgb/throttled/image_rect_color/compressed
- - /head_camera/depth_registered/throttled/image_rect/compressedDepth
+ - /head_camera/depth_registered/throttled/image_rect/zdepth
- /photo_taken
- /server_name/smach/container_init
- /server_name/smach/container_status
- /server_name/smach/container_structure
- /audio
- /rviz/throttled/image/compressed
+ - /smach_image_publisher/image/compressed
+ - name: head_camera_converter_plugin
+ type: app_recorder/rosbag_video_converter_plugin
+ plugin_args:
+ rosbag_path: /tmp
+ rosbag_title: go_to_kitchen_rosbag.bag
+ image_topic_name: /head_camera/rgb/throttled/image_rect_color/compressed
+ image_fps: 5
+ audio_topic_name: /audio
+ audio_sample_rate: 16000
+ audio_channels: 1
+ video_path: /tmp/go_to_kitchen_head_camera.mp4
+ - name: object_detection_converter_plugin
+ type: app_recorder/rosbag_video_converter_plugin
+ plugin_args:
+ rosbag_path: /tmp
+ rosbag_title: go_to_kitchen_rosbag.bag
+ image_topic_name: /edgetpu_object_detector/output/image/compressed
+ image_fps: 5
+ audio_topic_name: /audio
+ audio_sample_rate: 16000
+ audio_channels: 1
+ video_path: /tmp/go_to_kitchen_object_detection.mp4
+ - name: panorama_converter_plugin
+ type: app_recorder/rosbag_video_converter_plugin
+ plugin_args:
+ rosbag_path: /tmp
+ rosbag_title: go_to_kitchen_rosbag.bag
+ image_topic_name: /dual_fisheye_to_panorama/quater/output/compressed
+ image_fps: 1
+ video_path: /tmp/go_to_kitchen_panorama.mp4
+ - name: rviz_converter_plugin
+ type: app_recorder/rosbag_video_converter_plugin
+ plugin_args:
+ rosbag_path: /tmp
+ rosbag_title: go_to_kitchen_rosbag.bag
+ image_topic_name: /rviz/throttled/image/compressed
+ image_fps: 5
+ video_path: /tmp/go_to_kitchen_rviz.mp4
+ - name: smach_converter_plugin
+ type: app_recorder/rosbag_video_converter_plugin
+ plugin_args:
+ rosbag_path: /tmp
+ rosbag_title: go_to_kitchen_rosbag.bag
+ image_topic_name: /smach_image_publisher/image/compressed
+ image_fps: 2
+ video_path: /tmp/go_to_kitchen_smach.mp4
+ - name: respeaker_audio_converter_plugin
+ type: app_recorder/rosbag_audio_converter_plugin
+ plugin_args:
+ rosbag_path: /tmp
+ rosbag_title: go_to_kitchen_rosbag.bag
+ audio_topic_name: /audio
+ audio_sample_rate: 16000
+ audio_channels: 1
+ audio_path: /tmp/go_to_kitchen_audio.wav
- name: result_recorder_plugin
type: app_recorder/result_recorder_plugin
plugin_args:
@@ -90,20 +113,33 @@ plugins:
plugin_args:
upload_file_paths:
- /tmp/go_to_kitchen_result.yaml
- - /tmp/go_to_kitchen_head_camera.avi
- - /tmp/go_to_kitchen_object_detection.avi
- - /tmp/go_to_kitchen_panorama.avi
+ - /tmp/go_to_kitchen_head_camera.mp4
+ - /tmp/go_to_kitchen_object_detection.mp4
+ - /tmp/go_to_kitchen_panorama.mp4
+ - /tmp/go_to_kitchen_rviz.mp4
+ - /tmp/go_to_kitchen_smach.mp4
- /tmp/go_to_kitchen_audio.wav
- /tmp/go_to_kitchen_rosbag.bag
+ - /tmp/trashcan_inside.jpg
upload_file_titles:
- go_to_kitchen_result.yaml
- - go_to_kitchen_head_camera.avi
- - go_to_kitchen_object_detection.avi
- - go_to_kitchen_panorama.avi
+ - go_to_kitchen_head_camera.mp4
+ - go_to_kitchen_object_detection.mp4
+ - go_to_kitchen_panorama.mp4
+ - go_to_kitchen_rviz.mp4
+ - go_to_kitchen_smach.mp4
- go_to_kitchen_audio.wav
- go_to_kitchen_rosbag.bag
+ - trashcan_inside.jpg
upload_parents_path: fetch_go_to_kitchen
upload_server_name: /gdrive_server
+ - name: tweet_notifier_plugin
+ type: app_notifier/tweet_notifier_plugin
+ plugin_args:
+ client_name: /tweet_image_server/tweet
+ image: true
+ image_topic_name: /edgetpu_object_detector/output/image
+ warning: false
- name: speech_notifier_plugin
type: app_notifier/speech_notifier_plugin
plugin_args:
@@ -113,6 +149,7 @@ plugins:
plugin_args:
mail_title: Fetch kitchen patrol demo
use_timestamp_title: true
+ use_app_start_time: true
plugin_arg_yaml: /var/lib/robot/fetch_mail_notifier_plugin.yaml
- name: move_base_cancel_plugin
type: app_publisher/rostopic_publisher_plugin
@@ -136,13 +173,16 @@ plugin_order:
- move_base_cancel_plugin
- service_notification_saver_plugin
- smach_notification_saver_plugin
- - head_camera_video_recorder_plugin
- - object_detection_video_recorder_plugin
- - panorama_video_recorder_plugin
- - respeaker_audio_recorder_plugin
- rosbag_recorder_plugin
+ - head_camera_converter_plugin
+ - object_detection_converter_plugin
+ - panorama_converter_plugin
+ - rviz_converter_plugin
+ - smach_converter_plugin
+ - respeaker_audio_converter_plugin
- result_recorder_plugin
- gdrive_uploader_plugin
+ - tweet_notifier_plugin
- speech_notifier_plugin
- mail_notifier_plugin
- shutdown_plugin
@@ -150,13 +190,16 @@ plugin_order:
- move_base_cancel_plugin
- service_notification_saver_plugin
- smach_notification_saver_plugin
- - head_camera_video_recorder_plugin
- - object_detection_video_recorder_plugin
- - panorama_video_recorder_plugin
- - respeaker_audio_recorder_plugin
- rosbag_recorder_plugin
+ - head_camera_converter_plugin
+ - object_detection_converter_plugin
+ - panorama_converter_plugin
+ - rviz_converter_plugin
+ - smach_converter_plugin
+ - respeaker_audio_converter_plugin
- result_recorder_plugin
- gdrive_uploader_plugin
+ - tweet_notifier_plugin
- speech_notifier_plugin
- mail_notifier_plugin
- shutdown_plugin
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/go_to_kitchen/go_to_kitchen.xml b/jsk_fetch_robot/jsk_fetch_startup/apps/go_to_kitchen/go_to_kitchen.xml
index 81c75095b2..095dd2a6cb 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/apps/go_to_kitchen/go_to_kitchen.xml
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/go_to_kitchen/go_to_kitchen.xml
@@ -1,6 +1,6 @@
-
+
@@ -14,4 +14,57 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ topics:
+ - /sound_play/goal
+ - /speech_to_text
+
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/hello_world/hello_world.app b/jsk_fetch_robot/jsk_fetch_startup/apps/hello_world/hello_world.app
index 7b9b90ea81..a2dc73bd13 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/apps/hello_world/hello_world.app
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/hello_world/hello_world.app
@@ -1,5 +1,5 @@
display: Fetch hello world
platform: fetch
-launch: jsk_fetch_startup/hello_world.xml
+run: jsk_robot_startup/boot_sound.py
interface: jsk_fetch_startup/hello_world.interface
icon: jsk_fetch_startup/hello_world.png
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/light_off/light_off.app b/jsk_fetch_robot/jsk_fetch_startup/apps/light_off/light_off.app
index daf7f86708..f8aeb69c3c 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/apps/light_off/light_off.app
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/light_off/light_off.app
@@ -1,6 +1,6 @@
display: Fetch light off
platform: fetch
-launch: jsk_fetch_startup/light_off.xml
+run: jsk_fetch_startup/light-off.l
interface: jsk_fetch_startup/light_off.interface
icon: jsk_fetch_startup/light_off.png
plugins:
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/light_on/light_on.app b/jsk_fetch_robot/jsk_fetch_startup/apps/light_on/light_on.app
index ef63123502..eb66297f74 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/apps/light_on/light_on.app
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/light_on/light_on.app
@@ -1,6 +1,6 @@
display: Fetch light on
platform: fetch
-launch: jsk_fetch_startup/light_on.xml
+run: jsk_fetch_startup/light-on.l
interface: jsk_fetch_startup/light_on.interface
icon: jsk_fetch_startup/light_on.png
plugins:
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/plug_spot_power_connector/plug_spot_power_connector.app b/jsk_fetch_robot/jsk_fetch_startup/apps/plug_spot_power_connector/plug_spot_power_connector.app
new file mode 100644
index 0000000000..10982ad16c
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/plug_spot_power_connector/plug_spot_power_connector.app
@@ -0,0 +1,75 @@
+display: Plug Spot Power Connector
+platform: fetch
+launch: jsk_fetch_startup/plug_spot_power_connector.xml
+interface: jsk_fetch_startup/plug_spot_power_connector.interface
+icon: jsk_fetch_startup/plug_spot_power_connector.png
+plugins:
+ - name: service_notification_saver_plugin
+ type: app_notification_saver/service_notification_saver
+ - name: head_camera_video_recorder_plugin
+ type: app_recorder/audio_video_recorder_plugin
+ launch_args:
+ video_path: /tmp
+ video_title: plug_spot_power_connector_head_camera.avi
+ audio_topic_name: /audio
+ audio_channels: 1
+ audio_sample_rate: 16000
+ audio_format: wave
+ audio_sample_format: S16LE
+ video_topic_name: /l515_head/color/image_raw
+ video_height: 1080
+ video_width: 1920
+ video_framerate: 30
+ video_encoding: RGB
+ - name: panorama_video_recorder_plugin
+ type: app_recorder/video_recorder_plugin
+ launch_args:
+ video_path: /tmp
+ video_title: plug_spot_power_connector_panorama.avi
+ video_topic_name: /dual_fisheye_to_panorama/output
+ video_fps: 1.0
+ - name: result_recorder_plugin
+ type: app_recorder/result_recorder_plugin
+ plugin_args:
+ result_path: /tmp
+ result_title: plug_spot_power_connector_result.yaml
+ - name: gdrive_uploader_plugin
+ type: app_uploader/gdrive_uploader_plugin
+ plugin_args:
+ upload_file_paths:
+ - /tmp/plug_spot_power_connector_result.yaml
+ - /tmp/plug_spot_power_connector_head_camera.avi
+ - /tmp/plug_spot_power_connector_panorama.avi
+ upload_file_titles:
+ - plug_spot_power_connector_result.yaml
+ - plug_spot_power_connector_head_camera.avi
+ - plug_spot_power_connector_panorama.avi
+ upload_parents_path: fetch_plug_spot_power_connector
+ upload_server_name: /gdrive_server
+ - name: speech_notifier_plugin
+ type: app_notifier/speech_notifier_plugin
+ plugin_args:
+ client_name: /sound_play
+ - name: mail_notifier_plugin
+ type: app_notifier/mail_notifier_plugin
+ plugin_args:
+ mail_title: Fetch Plug Spot Power Connector Demo
+ use_timestamp_title: true
+ plugin_arg_yaml: /var/lib/robot/fetch_mail_notifier_plugin.yaml
+plugin_order:
+ start_plugin_order:
+ - service_notification_saver_plugin
+ - head_camera_video_recorder_plugin
+ - panorama_video_recorder_plugin
+ - result_recorder_plugin
+ - gdrive_uploader_plugin
+ - speech_notifier_plugin
+ - mail_notifier_plugin
+ stop_plugin_order:
+ - service_notification_saver_plugin
+ - head_camera_video_recorder_plugin
+ - panorama_video_recorder_plugin
+ - result_recorder_plugin
+ - gdrive_uploader_plugin
+ - speech_notifier_plugin
+ - mail_notifier_plugin
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/plug_spot_power_connector/plug_spot_power_connector.interface b/jsk_fetch_robot/jsk_fetch_startup/apps/plug_spot_power_connector/plug_spot_power_connector.interface
new file mode 100644
index 0000000000..044105d644
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/plug_spot_power_connector/plug_spot_power_connector.interface
@@ -0,0 +1,2 @@
+published_topics: {}
+subscribed_topics: {}
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/plug_spot_power_connector/plug_spot_power_connector.png b/jsk_fetch_robot/jsk_fetch_startup/apps/plug_spot_power_connector/plug_spot_power_connector.png
new file mode 100644
index 0000000000..d1b1329d2f
Binary files /dev/null and b/jsk_fetch_robot/jsk_fetch_startup/apps/plug_spot_power_connector/plug_spot_power_connector.png differ
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/plug_spot_power_connector/plug_spot_power_connector.xml b/jsk_fetch_robot/jsk_fetch_startup/apps/plug_spot_power_connector/plug_spot_power_connector.xml
new file mode 100644
index 0000000000..ad05e91977
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/plug_spot_power_connector/plug_spot_power_connector.xml
@@ -0,0 +1,3 @@
+
+
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/software_runstop/software_runstop.app b/jsk_fetch_robot/jsk_fetch_startup/apps/software_runstop/software_runstop.app
index 6c86c77347..ed4a25c745 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/apps/software_runstop/software_runstop.app
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/software_runstop/software_runstop.app
@@ -1,5 +1,6 @@
display: Fetch software runstop
platform: fetch
-launch: jsk_fetch_startup/software_runstop.xml
+run: rostopic/rostopic
+run_args: "pub -1 /enable_software_runstop std_msgs/Bool 'data: true'"
interface: jsk_fetch_startup/software_runstop.interface
icon: jsk_fetch_startup/software_runstop.png
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/speak_battery/speak_battery.app b/jsk_fetch_robot/jsk_fetch_startup/apps/speak_battery/speak_battery.app
index 0a48645098..2dc162d470 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/apps/speak_battery/speak_battery.app
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/speak_battery/speak_battery.app
@@ -1,6 +1,6 @@
display: Speak battery
platform: fetch
-launch: jsk_fetch_startup/speak_battery.xml
+run: jsk_fetch_startup/speak-battery.l
interface: jsk_fetch_startup/speak_battery.interface
icon: jsk_fetch_startup/speak_battery.png
plugins:
@@ -8,6 +8,7 @@ plugins:
type: app_notifier/user_speech_notifier_plugin
plugin_args:
client_name: /sound_play
+ warning: true
plugin_order:
start_plugin_order:
- user_speech_notifier_plugin
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/time_signal/time_signal.app b/jsk_fetch_robot/jsk_fetch_startup/apps/time_signal/time_signal.app
index d1c5e17227..e82fe5629f 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/apps/time_signal/time_signal.app
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/time_signal/time_signal.app
@@ -1,10 +1,19 @@
display: Speak time signal
platform: fetch
-launch: jsk_fetch_startup/time_signal.xml
+run: jsk_fetch_startup/time_signal.py
+run_name: "time_signal"
+# run_name needs https://github.com/PR2/app_manager/pull/64
interface: jsk_fetch_startup/time_signal.interface
icon: jsk_fetch_startup/time_signal.png
-timeout: 10
+timeout: 120
plugins:
+ - name: tweet_notifier_plugin
+ type: app_notifier/tweet_notifier_plugin
+ plugin_args:
+ client_name: /tweet_image_server/tweet
+ image: true
+ image_topic_name: /edgetpu_object_detector/output/image
+ warning: false
- name: user_speech_notifier_plugin
type: app_notifier/user_speech_notifier_plugin
plugin_args:
@@ -12,6 +21,8 @@ plugins:
warning: false
plugin_order:
start_plugin_order:
+ - tweet_notifier_plugin
- user_speech_notifier_plugin
stop_plugin_order:
+ - tweet_notifier_plugin
- user_speech_notifier_plugin
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/tweet/tweet.app b/jsk_fetch_robot/jsk_fetch_startup/apps/tweet/tweet.app
index da0197d1b9..28d7cc4bf1 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/apps/tweet/tweet.app
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/tweet/tweet.app
@@ -1,6 +1,6 @@
display: Fetch tweet
platform: fetch
-launch: jsk_fetch_startup/tweet.xml
+run: jsk_fetch_startup/tweet.l
interface: jsk_fetch_startup/tweet.interface
icon: jsk_fetch_startup/tweet.png
plugins:
@@ -8,6 +8,7 @@ plugins:
type: app_notifier/user_speech_notifier_plugin
plugin_args:
client_name: /sound_play
+ warning: true
plugin_order:
start_plugin_order:
- user_speech_notifier_plugin
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/undock/undock.app b/jsk_fetch_robot/jsk_fetch_startup/apps/undock/undock.app
index da845f0a25..78a4b30891 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/apps/undock/undock.app
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/undock/undock.app
@@ -1,5 +1,5 @@
display: Fetch undock
platform: fetch
-launch: jsk_fetch_startup/undock.xml
+run: jsk_fetch_startup/undock.l
interface: jsk_fetch_startup/undock.interface
icon: jsk_fetch_startup/undock.png
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/unplug_spot_power_connector/unplug_spot_power_connector.app b/jsk_fetch_robot/jsk_fetch_startup/apps/unplug_spot_power_connector/unplug_spot_power_connector.app
new file mode 100644
index 0000000000..680166f454
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/unplug_spot_power_connector/unplug_spot_power_connector.app
@@ -0,0 +1,75 @@
+display: Unplug Spot Power Connector
+platform: fetch
+launch: jsk_fetch_startup/unplug_spot_power_connector.xml
+interface: jsk_fetch_startup/unplug_spot_power_connector.interface
+icon: jsk_fetch_startup/unplug_spot_power_connector.png
+plugins:
+ - name: service_notification_saver_plugin
+ type: app_notification_saver/service_notification_saver
+ - name: head_camera_video_recorder_plugin
+ type: app_recorder/audio_video_recorder_plugin
+ launch_args:
+ video_path: /tmp
+ video_title: unplug_spot_power_connector_head_camera.avi
+ audio_topic_name: /audio
+ audio_channels: 1
+ audio_sample_rate: 16000
+ audio_format: wave
+ audio_sample_format: S16LE
+ video_topic_name: /l515_head/color/image_raw
+ video_height: 1080
+ video_width: 1920
+ video_framerate: 30
+ video_encoding: RGB
+ - name: panorama_video_recorder_plugin
+ type: app_recorder/video_recorder_plugin
+ launch_args:
+ video_path: /tmp
+ video_title: unplug_spot_power_connector_panorama.avi
+ video_topic_name: /dual_fisheye_to_panorama/output
+ video_fps: 1.0
+ - name: result_recorder_plugin
+ type: app_recorder/result_recorder_plugin
+ plugin_args:
+ result_path: /tmp
+ result_title: unplug_spot_power_connector_result.yaml
+ - name: gdrive_uploader_plugin
+ type: app_uploader/gdrive_uploader_plugin
+ plugin_args:
+ upload_file_paths:
+ - /tmp/unplug_spot_power_connector_result.yaml
+ - /tmp/unplug_spot_power_connector_head_camera.avi
+ - /tmp/unplug_spot_power_connector_panorama.avi
+ upload_file_titles:
+ - unplug_spot_power_connector_result.yaml
+ - unplug_spot_power_connector_head_camera.avi
+ - unplug_spot_power_connector_panorama.avi
+ upload_parents_path: fetch_unplug_spot_power_connector
+ upload_server_name: /gdrive_server
+ - name: speech_notifier_plugin
+ type: app_notifier/speech_notifier_plugin
+ plugin_args:
+ client_name: /sound_play
+ - name: mail_notifier_plugin
+ type: app_notifier/mail_notifier_plugin
+ plugin_args:
+ mail_title: Fetch Unplug Spot Power Connector Demo
+ use_timestamp_title: true
+ plugin_arg_yaml: /var/lib/robot/fetch_mail_notifier_plugin.yaml
+plugin_order:
+ start_plugin_order:
+ - service_notification_saver_plugin
+ - head_camera_video_recorder_plugin
+ - panorama_video_recorder_plugin
+ - result_recorder_plugin
+ - gdrive_uploader_plugin
+ - speech_notifier_plugin
+ - mail_notifier_plugin
+ stop_plugin_order:
+ - service_notification_saver_plugin
+ - head_camera_video_recorder_plugin
+ - panorama_video_recorder_plugin
+ - result_recorder_plugin
+ - gdrive_uploader_plugin
+ - speech_notifier_plugin
+ - mail_notifier_plugin
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/unplug_spot_power_connector/unplug_spot_power_connector.interface b/jsk_fetch_robot/jsk_fetch_startup/apps/unplug_spot_power_connector/unplug_spot_power_connector.interface
new file mode 100644
index 0000000000..044105d644
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/unplug_spot_power_connector/unplug_spot_power_connector.interface
@@ -0,0 +1,2 @@
+published_topics: {}
+subscribed_topics: {}
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/unplug_spot_power_connector/unplug_spot_power_connector.png b/jsk_fetch_robot/jsk_fetch_startup/apps/unplug_spot_power_connector/unplug_spot_power_connector.png
new file mode 100644
index 0000000000..3098183bc3
Binary files /dev/null and b/jsk_fetch_robot/jsk_fetch_startup/apps/unplug_spot_power_connector/unplug_spot_power_connector.png differ
diff --git a/jsk_fetch_robot/jsk_fetch_startup/apps/unplug_spot_power_connector/unplug_spot_power_connector.xml b/jsk_fetch_robot/jsk_fetch_startup/apps/unplug_spot_power_connector/unplug_spot_power_connector.xml
new file mode 100644
index 0000000000..d61fc63f62
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/apps/unplug_spot_power_connector/unplug_spot_power_connector.xml
@@ -0,0 +1,3 @@
+
+
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/cfg/TimeSignal.cfg b/jsk_fetch_robot/jsk_fetch_startup/cfg/TimeSignal.cfg
new file mode 100644
index 0000000000..e22d48bc1e
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/cfg/TimeSignal.cfg
@@ -0,0 +1,11 @@
+#! /usr/bin/env python
+
+
+from dynamic_reconfigure.parameter_generator_catkin import *
+
+PACKAGE = 'jsk_fetch_startup'
+
+gen = ParameterGenerator()
+gen.add("volume", double_t, 0, "Volume of sound.", 1.0, 0.0, 1.0)
+
+exit(gen.generate(PACKAGE, PACKAGE, "TimeSignal"))
diff --git a/jsk_fetch_robot/jsk_fetch_startup/config/.gitignore b/jsk_fetch_robot/jsk_fetch_startup/config/.gitignore
new file mode 100644
index 0000000000..dd8bb6cb6a
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/config/.gitignore
@@ -0,0 +1,2 @@
+fetch*_dialogflow_hotword.yaml
+fetch*_email_topic.yaml
diff --git a/jsk_fetch_robot/jsk_fetch_startup/config/config.bash b/jsk_fetch_robot/jsk_fetch_startup/config/config.bash
index ea364d3b12..1ce371abbf 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/config/config.bash
+++ b/jsk_fetch_robot/jsk_fetch_startup/config/config.bash
@@ -1,7 +1,52 @@
# This file is bash configuration for robot.conf
# This file must be at /var/lib/robot/config.bash
-export RS_SERIAL_NO_T265=""
-export RS_SERIAL_NO_D435_FRONTRIGHT=""
-export RS_SERIAL_NO_D435_FRONTLEFT=""
-export RS_SERIAL_NO_L515_HEAD=""
+if [ $(hostname) = 'fetch15' ]; then
+ export DEFAULT_SPEAKER=13;
+ export DEFAULT_ENGLISH_SPEAKER=cmu_us_bdl.flitevox;
+ export DEFAULT_WARNING_SPEAKER=cmu_us_fem.flitevox;
+
+ export USE_BASE_CAMERA_MOUNT=true;
+ export USE_HEAD_BOX=false;
+ export USE_HEAD_L515=true;
+ export USE_INSTA360_STAND=true;
+
+ export RS_SERIAL_NO_T265="925122110450";
+ export RS_SERIAL_NO_D435_FRONTRIGHT="";
+ export RS_SERIAL_NO_D435_FRONTLEFT="";
+ # Disable L515 to reduce fetch's CPU usage
+ # Use L515 after finding a way to reduce L515 CPU usage like ConnectionBasedTransport
+ # export RS_SERIAL_NO_L515_HEAD="f0211890";
+ export RS_SERIAL_NO_L515_HEAD="";
+
+ export NETWORK_DEFAULT_WIFI_INTERFACE="wlan0";
+ export NETWORK_DEFAULT_ROS_INTERFACE="fetch15";
+ export NETWORK_DEFAULT_PROFILE_ID="sanshiro-73B2";
+
+ export AUDIO_DEVICE="alsa_output.usb-1130_USB_AUDIO-00.analog-stereo"
+elif [ $(hostname) = 'fetch1075' ]; then
+ export DEFAULT_SPEAKER=2;
+ export DEFAULT_ENGLISH_SPEAKER=cmu_us_slt.flitevox;
+ export DEFAULT_WARNING_SPEAKER=cmu_us_lnh.flitevox;
+
+ export USE_BASE_CAMERA_MOUNT=false;
+ export USE_HEAD_BOX=false;
+ export USE_HEAD_L515=true;
+ export USE_INSTA360_STAND=true;
+
+ export RS_SERIAL_NO_T265="";
+ export RS_SERIAL_NO_D435_FRONTRIGHT="";
+ export RS_SERIAL_NO_D435_FRONTLEFT="";
+ # Disable L515 to reduce fetch's CPU usage
+ # Use L515 after finding a way to reduce L515 CPU usage like ConnectionBasedTransport
+ export RS_SERIAL_NO_L515_HEAD="f0232270";
+ #export RS_SERIAL_NO_L515_HEAD="";
+
+ export NETWORK_DEFAULT_WIFI_INTERFACE="wlan0";
+ export NETWORK_DEFAULT_ROS_INTERFACE="fetch1075";
+ export NETWORK_DEFAULT_PROFILE_ID="sanshiro-73B2";
+
+ export AUDIO_DEVICE="alsa_output.usb-SEEED_ReSpeaker_4_Mic_Array__UAC1.0_-00.analog-stereo"
+
+ export SMART_DEVICE_PORT=/dev/ttyACM0
+fi
diff --git a/jsk_fetch_robot/jsk_fetch_startup/config/config_outside.bash b/jsk_fetch_robot/jsk_fetch_startup/config/config_outside.bash
new file mode 100644
index 0000000000..007560b460
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/config/config_outside.bash
@@ -0,0 +1,12 @@
+# This file is bash configuration for robot.conf
+# This file must be at /var/lib/robot/config.bash
+
+SCRIPT_DIR="$( cd -- "$( dirname -- "${BASH_SOURCE[0]:-$0}"; )" &> /dev/null && pwd 2> /dev/null; )";
+. $SCRIPT_DIR/config.bash
+
+if [ $(hostname) = 'fetch15' ]; then
+ export NETWORK_DEFAULT_PROFILE_ID="sanshiro-outside";
+elif [ $(hostname) = 'fetch1075' ]; then
+ export NETWORK_DEFAULT_ROS_INTERFACE="fetch1075.local";
+ export NETWORK_DEFAULT_PROFILE_ID="sanshiro-outside";
+fi
diff --git a/jsk_fetch_robot/jsk_fetch_startup/config/dialogflow_hotword.yaml.in b/jsk_fetch_robot/jsk_fetch_startup/config/dialogflow_hotword.yaml.in
new file mode 100644
index 0000000000..73714a65a9
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/config/dialogflow_hotword.yaml.in
@@ -0,0 +1,5 @@
+- ねえねえ
+- こんにちわ
+- やあ
+- @ROBOT_NICKNAME_KANA@
+- @ROBOT_NICKNAME_HIRA@
diff --git a/jsk_fetch_robot/jsk_fetch_startup/config/email_topic.yaml.in b/jsk_fetch_robot/jsk_fetch_startup/config/email_topic.yaml.in
new file mode 100644
index 0000000000..a087a38abb
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/config/email_topic.yaml.in
@@ -0,0 +1,2 @@
+sender_address: @EMAIL_SENDER_ADDRESS@
+receiver_address: @EMAIL_RECEIVER_ADDRESS@
diff --git a/jsk_fetch_robot/jsk_fetch_startup/config/fetch1075_app_schedule.yaml b/jsk_fetch_robot/jsk_fetch_startup/config/fetch1075_app_schedule.yaml
new file mode 100644
index 0000000000..b15d843c4b
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/config/fetch1075_app_schedule.yaml
@@ -0,0 +1,52 @@
+# 'go to kitchen' launch time is temporary changed to 9:30 AM by yamaguchi, 2022/05/20.
+# Recently fetch1075 freezes at 9:00 AM.
+# I think the reason may be the simultaneous launch of 'go to kitchen' and 'time signal'
+- name: go_to_kitchen_morning
+ app_name: jsk_fetch_startup/go_to_kitchen
+ app_schedule:
+ start: every(1).day.at("09:30")
+- name: go_to_kitchen_noon
+ app_name: jsk_fetch_startup/go_to_kitchen
+ app_schedule:
+ start: every(1).day.at("13:30")
+- name: go_to_kitchen_evening
+ app_name: jsk_fetch_startup/go_to_kitchen
+ app_schedule:
+ start: every(1).day.at("17:30")
+- name: go_to_kitchen_night
+ app_name: jsk_fetch_startup/go_to_kitchen
+ app_schedule:
+ start: every(1).day.at("21:30")
+# time singnal
+- name: time_signal
+ app_name: jsk_fetch_startup/time_signal
+ app_schedule:
+ start: every(1).hour.at(":00")
+# upload notification
+- name: upload_notification
+ app_name: jsk_fetch_startup/upload_notification
+ app_schedule:
+ start: every(1).day.at("03:50")
+# check use_sim_time
+- name: check_use_sim_time
+ app_name: jsk_robot_startup/check_use_sim_time
+ app_schedule:
+ start: every().hour.at(":00")
+# volume for monday meeting
+- name: volume_zero_monday
+ app_name: jsk_robot_startup/volume_zero
+ app_schedule:
+ start: every().monday.at("12:00")
+- name: volume_reset_monday
+ app_name: jsk_robot_startup/volume_reset
+ app_schedule:
+ start: every().monday.at("16:00")
+# volume for tuesday meeting
+- name: volume_zero_tuesday
+ app_name: jsk_robot_startup/volume_zero
+ app_schedule:
+ start: every().tuesday.at("12:00")
+- name: volume_reset_tuesday
+ app_name: jsk_robot_startup/volume_reset
+ app_schedule:
+ start: every().tuesday.at("16:00")
diff --git a/jsk_fetch_robot/jsk_fetch_startup/config/fetch15_app_schedule.yaml b/jsk_fetch_robot/jsk_fetch_startup/config/fetch15_app_schedule.yaml
new file mode 100644
index 0000000000..6fd9e0c702
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/config/fetch15_app_schedule.yaml
@@ -0,0 +1,33 @@
+# time signal
+- name: time_signal
+ app_name: jsk_fetch_startup/time_signal
+ app_schedule:
+ start: every(1).hour.at(":00")
+# upload notification
+- name: upload_notification
+ app_name: jsk_fetch_startup/upload_notification
+ app_schedule:
+ start: every(1).day.at("03:50")
+# check use_sim_time
+- name: check_use_sim_time
+ app_name: jsk_robot_startup/check_use_sim_time
+ app_schedule:
+ start: every().hour.at(":00")
+# volume for monday meeting
+- name: volume_zero_monday
+ app_name: jsk_robot_startup/volume_zero
+ app_schedule:
+ start: every().monday.at("12:00")
+- name: volume_reset_monday
+ app_name: jsk_robot_startup/volume_reset
+ app_schedule:
+ start: every().monday.at("16:00")
+# volume for tuesday meeting
+- name: volume_zero_tuesday
+ app_name: jsk_robot_startup/volume_zero
+ app_schedule:
+ start: every().tuesday.at("12:00")
+- name: volume_reset_tuesday
+ app_name: jsk_robot_startup/volume_reset
+ app_schedule:
+ start: every().tuesday.at("16:00")
diff --git a/jsk_fetch_robot/jsk_fetch_startup/config/fetch_analyzers.yaml b/jsk_fetch_robot/jsk_fetch_startup/config/fetch_analyzers.yaml
index f4847a4cba..d6b18c8111 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/config/fetch_analyzers.yaml
+++ b/jsk_fetch_robot/jsk_fetch_startup/config/fetch_analyzers.yaml
@@ -102,7 +102,7 @@ analyzers:
path: Head Camera
timeout: 5.0
startswith: 'head_camera'
- num_items: 2
+ num_items: 4
imu:
type: diagnostic_aggregator/GenericAnalyzer
path: IMU
@@ -154,18 +154,6 @@ analyzers:
contains: '/audio'
timeout: 100
discard_stale: true
- head_depth_image:
- type: diagnostic_aggregator/GenericAnalyzer
- path: HeadDepthImage
- contains: '/head_camera/depth/image_raw'
- timeout: 100
- discard_stale: true
- head_rgb_image:
- type: diagnostic_aggregator/GenericAnalyzer
- path: HeadRGBImage
- contains: '/head_camera/rgb/image_raw'
- timeout: 100
- discard_stale: true
nodes:
type: diagnostic_aggregator/AnalyzerGroup
path: Nodes
diff --git a/jsk_fetch_robot/jsk_fetch_startup/config/install_cron.sh b/jsk_fetch_robot/jsk_fetch_startup/config/install_cron.sh
new file mode 100755
index 0000000000..186b8dc4cc
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/config/install_cron.sh
@@ -0,0 +1,15 @@
+#!/bin/bash
+
+jsk_fetch_startup=$(builtin cd "`dirname "${BASH_SOURCE[0]}"`"/.. > /dev/null && pwd)
+
+IFS=':' read -r -a prefix_paths <<< "$CMAKE_PREFIX_PATH"
+current_prefix_path="${prefix_paths[0]}"
+
+set -x
+
+cd $jsk_fetch_startup/cron_scripts
+sudo -u fetch crontab cron_fetch.conf
+echo "Set cron jobs for fetch user"
+sudo -u root crontab cron_root.conf
+echo "Set cron jobs for root user"
+set +x
diff --git a/jsk_fetch_robot/jsk_fetch_startup/config/install_supervisor.sh b/jsk_fetch_robot/jsk_fetch_startup/config/install_supervisor.sh
index d07fbfb529..6a35d559c0 100755
--- a/jsk_fetch_robot/jsk_fetch_startup/config/install_supervisor.sh
+++ b/jsk_fetch_robot/jsk_fetch_startup/config/install_supervisor.sh
@@ -8,16 +8,14 @@ current_prefix_path="${prefix_paths[0]}"
set -x
cd $jsk_fetch_startup/supervisor_scripts
-for file in $(ls ./*.conf); do
- sudo cp $file /etc/supervisor/conf.d/
- sudo chown root:root /etc/supervisor/conf.d/$file
- sudo chmod 644 /etc/supervisor/conf.d/$file
- echo "copied $file to /etc/supervisor/conf.d"
+for file in $(ls *.conf); do
+ sudo ln -sf $jsk_fetch_startup/supervisor_scripts/$file /etc/supervisor/conf.d/$file
done
+sudo supervisorctl reread
+# Enable jsk_dstat job to save the csv log under /var/log
+sudo ln -sf /home/fetch/Documents/jsk_dstat.csv /var/log/ros/jsk-dstat.csv
-# copy config.bash to /var/lib/robo if not exists
-if [ ! -e /var/lib/robot/config.bash ]; then
- sudo cp $jsk_fetch_startup/config/config.bash /var/lib/robot/config.bash
-fi
+sudo ln -sf $jsk_fetch_startup/config/config.bash /var/lib/robot/config.bash
+sudo ln -sf $jsk_fetch_startup/config/config_outside.bash /var/lib/robot/config_outside.bash
set +x
diff --git a/jsk_fetch_robot/jsk_fetch_startup/config/install_udev.sh b/jsk_fetch_robot/jsk_fetch_startup/config/install_udev.sh
index b079e114a4..5e8e1cec43 100755
--- a/jsk_fetch_robot/jsk_fetch_startup/config/install_udev.sh
+++ b/jsk_fetch_robot/jsk_fetch_startup/config/install_udev.sh
@@ -1,17 +1,12 @@
#!/bin/bash
+# 99-edgetpu-accelerator.rules and 99-realsense-libusb.rules are not tracked in jsk_fetch_startup
+# because they are installed by apt
+
jsk_fetch_startup=$(builtin cd "`dirname "${BASH_SOURCE[0]}"`"/.. > /dev/null && pwd)
cd $jsk_fetch_startup/udev_rules
for file in $(ls *.rules); do
- if [ -e /etc/udev/rules.d/$file ]; then
- file_bk=$file.$(date "+%Y%m%d_%H%M%S")
- sudo cp /etc/udev/rules.d/$file /etc/udev/rules.d/$file_bk
- echo "backup /etc/udev/rules.d/$file to /etc/udev/rules.d/$file_bk"
- fi
-
- sudo cp $file /etc/udev/rules.d/
- sudo chown root:root /etc/udev/rules.d/$file
- sudo chmod 644 /etc/udev/rules.d/$file
- echo -e "copied jsk_fetch_startup/udev_rules/$file to /etc/udev/rules.d/$file\n"
+ sudo ln -sf $jsk_fetch_startup/udev_rules/$file /etc/udev/rules.d/$file
+ echo -e "Create symbolic link from jsk_fetch_startup/udev_rules/$file to /etc/udev/rules.d/$file\n"
done
diff --git a/jsk_fetch_robot/jsk_fetch_startup/config/jsk_startup.rviz b/jsk_fetch_robot/jsk_fetch_startup/config/jsk_startup.rviz
index 6cb1fffa48..c8dd4f9418 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/config/jsk_startup.rviz
+++ b/jsk_fetch_robot/jsk_fetch_startup/config/jsk_startup.rviz
@@ -5,7 +5,7 @@ Panels:
Property Tree Widget:
Expanded: ~
Splitter Ratio: 0.4187380373477936
- Tree Height: 1319
+ Tree Height: 477
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
@@ -65,11 +65,6 @@ Visualization Manager:
Expand Link Details: false
Expand Tree: false
Link Tree Style: Links in Alphabetic Order
- base_camera_mount:
- Alpha: 1
- Show Axes: false
- Show Trail: false
- Value: true
base_link:
Alpha: 1
Show Axes: false
@@ -143,6 +138,10 @@ Visualization Manager:
Show Axes: false
Show Trail: false
Value: true
+ head_l515_virtual_mount_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
head_pan_link:
Alpha: 1
Show Axes: false
@@ -153,6 +152,10 @@ Visualization Manager:
Show Axes: false
Show Trail: false
Value: true
+ insta360_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
l515_head_link:
Alpha: 1
Show Axes: false
@@ -344,12 +347,12 @@ Visualization Manager:
Class: rviz/Map
Color Scheme: costmap
Draw Behind: false
- Enabled: false
+ Enabled: true
Name: SafeCostMap
Topic: /safe_teleop_base/local_costmap/costmap
Unreliable: false
Use Timestamp: false
- Value: false
+ Value: true
- Alpha: 0.3499999940395355
Class: rviz/Map
Color Scheme: costmap
@@ -401,9 +404,7 @@ Visualization Manager:
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
- Max Intensity: 4096
Min Color: 0; 0; 0
- Min Intensity: 0
Name: BaseScan
Position Transformer: XYZ
Queue Size: 10
@@ -431,9 +432,7 @@ Visualization Manager:
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
- Max Intensity: 4096
Min Color: 0; 0; 0
- Min Intensity: 0
Name: XtionPointCloud
Position Transformer: XYZ
Queue Size: 10
@@ -446,19 +445,6 @@ Visualization Manager:
Use Fixed Frame: true
Use rainbow: true
Value: true
- - Class: jsk_rviz_plugin/OverlayImage
- Enabled: true
- Name: XtionRGB
- Topic: /head_camera/rgb/quater/image_rect_color
- Value: true
- alpha: 0.800000011920929
- height: 128
- keep aspect ratio: true
- left: 10
- overwrite alpha value: false
- top: 10
- transport hint: raw
- width: 320
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
@@ -471,12 +457,10 @@ Visualization Manager:
Color: 255; 255; 255
Color Transformer: RGB8
Decay Time: 0
- Enabled: true
+ Enabled: false
Invert Rainbow: false
Max Color: 255; 255; 255
- Max Intensity: 4096
Min Color: 0; 0; 0
- Min Intensity: 0
Name: HeadL515PointCloud
Position Transformer: XYZ
Queue Size: 10
@@ -488,7 +472,93 @@ Visualization Manager:
Unreliable: false
Use Fixed Frame: true
Use rainbow: true
- Value: true
+ Value: false
+ - Class: rviz/Group
+ Displays:
+ - Class: jsk_rviz_plugin/OverlayImage
+ Enabled: true
+ Name: XtionRGB
+ Topic: /head_camera/rgb/quater/image_rect_color
+ Value: true
+ alpha: 0.800000011920929
+ height: 128
+ keep aspect ratio: true
+ left: 10
+ overwrite alpha value: false
+ top: 10
+ transport hint: raw
+ width: 320
+ - Class: jsk_rviz_plugin/OverlayImage
+ Enabled: false
+ Name: XtionRGBHumanPoseEstimator
+ Topic: /edgetpu_human_pose_estimator/output/image
+ Value: false
+ alpha: 0.800000011920929
+ height: 128
+ keep aspect ratio: true
+ left: 10
+ overwrite alpha value: false
+ top: 10
+ transport hint: raw
+ width: 320
+ - Class: jsk_rviz_plugin/OverlayImage
+ Enabled: false
+ Name: XtionRGBObjectDetector
+ Topic: /edgetpu_human_pose_estimator/output/image
+ Value: false
+ alpha: 0.800000011920929
+ height: 128
+ keep aspect ratio: true
+ left: 10
+ overwrite alpha value: false
+ top: 10
+ transport hint: raw
+ width: 320
+ Enabled: true
+ Name: XtionRGB
+ - Class: rviz/Group
+ Displays:
+ - Class: jsk_rviz_plugin/OverlayImage
+ Enabled: true
+ Name: PanoramaImage
+ Topic: /dual_fisheye_to_panorama/quater/output
+ Value: true
+ alpha: 0.800000011920929
+ height: 128
+ keep aspect ratio: true
+ left: 340
+ overwrite alpha value: false
+ top: 10
+ transport hint: raw
+ width: 480
+ - Class: jsk_rviz_plugin/OverlayImage
+ Enabled: false
+ Name: PanoramaHumanPoseEstimator
+ Topic: /edgetpu_panorama_human_pose_estimator/output/image
+ Value: false
+ alpha: 0.800000011920929
+ height: 128
+ keep aspect ratio: true
+ left: 340
+ overwrite alpha value: false
+ top: 10
+ transport hint: raw
+ width: 480
+ - Class: jsk_rviz_plugin/OverlayImage
+ Enabled: false
+ Name: PanoramaObjectDetector
+ Topic: /edgetpu_panorama_object_detector/output/image
+ Value: false
+ alpha: 0.800000011920929
+ height: 128
+ keep aspect ratio: true
+ left: 340
+ overwrite alpha value: false
+ top: 10
+ transport hint: raw
+ width: 480
+ Enabled: true
+ Name: PanoramaImage
Enabled: true
Global Options:
Background Color: 48; 48; 48
@@ -519,35 +589,35 @@ Visualization Manager:
Views:
Current:
Class: rviz/Orbit
- Distance: 10.471776962280273
+ Distance: 10
Enable Stereo Rendering:
Stereo Eye Separation: 0.05999999865889549
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Focal Point:
- X: -0.00829183217138052
- Y: 0.022624600678682327
- Z: -0.003759089857339859
- Focal Shape Fixed Size: true
+ X: 0
+ Y: 0
+ Z: 0
+ Focal Shape Fixed Size: false
Focal Shape Size: 0.05000000074505806
Invert Z Axis: false
Name: Current View
Near Clip Distance: 0.009999999776482582
- Pitch: 0.5747973322868347
+ Pitch: 0.7853981852531433
Target Frame: base_link
Value: Orbit (rviz)
- Yaw: 1.745403528213501
+ Yaw: 0.7853981852531433
Saved: ~
Window Geometry:
CancelAction:
- collapsed: true
+ collapsed: false
Displays:
- collapsed: true
- Height: 1865
- Hide Left Dock: true
+ collapsed: false
+ Height: 1025
+ Hide Left Dock: false
Hide Right Dock: true
- QMainWindow State: 000000ff00000000fd0000000400000000000001f8000006abfc020000000bfb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f0070006500720074006900650073020000019b000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073000000003d000005b2000000c900fffffffb00000018004b0069006e00650063007400430061006d0065007200610000000373000000160000000000000000fb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261fb00000018004e006100720072006f007700430061006d0065007200610000000244000001460000000000000000fb0000001800430061006e00630065006c0041006300740069006f006e00000005f5000000f30000007f00ffffff000000010000010f00000463fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073000000002800000463000000a400fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000780000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000003f50000003efc0100000002fb0000000800540069006d00650100000000000003f5000002eb00fffffffb0000000800540069006d00650100000000000004500000000000000000000003f5000006ab00000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
+ QMainWindow State: 000000ff00000000fd0000000400000000000001f800000361fc020000000bfb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f0070006500720074006900650073020000019b000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000003e00000269000000ca00fffffffb00000018004b0069006e00650063007400430061006d0065007200610000000373000000160000000000000000fb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261fb00000018004e006100720072006f007700430061006d0065007200610000000244000001460000000000000000fb0000001800430061006e00630065006c0041006300740069006f006e01000002ad000000f20000008200ffffff000000010000010f00000463fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073000000002800000463000000a600fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000780000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000007800000003efc0100000002fb0000000800540069006d00650100000000000007800000026200fffffffb0000000800540069006d00650100000000000004500000000000000000000005820000036100000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Time:
@@ -556,6 +626,6 @@ Window Geometry:
collapsed: false
Views:
collapsed: true
- Width: 1013
- X: 67
+ Width: 1920
+ X: 0
Y: 27
diff --git a/jsk_fetch_robot/jsk_fetch_startup/config/jsk_startup_record.rviz b/jsk_fetch_robot/jsk_fetch_startup/config/jsk_startup_record.rviz
index 8b162425f0..6ab7883d78 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/config/jsk_startup_record.rviz
+++ b/jsk_fetch_robot/jsk_fetch_startup/config/jsk_startup_record.rviz
@@ -3,9 +3,10 @@ Panels:
Help Height: 78
Name: Displays
Property Tree Widget:
- Expanded: ~
+ Expanded:
+ - /OverlayImage1
Splitter Ratio: 0.4187380373477936
- Tree Height: 624
+ Tree Height: 618
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
@@ -65,11 +66,6 @@ Visualization Manager:
Expand Link Details: false
Expand Tree: false
Link Tree Style: Links in Alphabetic Order
- base_camera_mount:
- Alpha: 1
- Show Axes: false
- Show Trail: false
- Value: true
base_link:
Alpha: 1
Show Axes: false
@@ -85,14 +81,6 @@ Visualization Manager:
Show Axes: false
Show Trail: false
Value: true
- d435_front_left_link:
- Alpha: 1
- Show Axes: false
- Show Trail: false
- d435_front_right_link:
- Alpha: 1
- Show Axes: false
- Show Trail: false
elbow_flex_link:
Alpha: 1
Show Axes: false
@@ -113,11 +101,6 @@ Visualization Manager:
Show Axes: false
Show Trail: false
Value: true
- head_box_link:
- Alpha: 1
- Show Axes: false
- Show Trail: false
- Value: true
head_camera_depth_frame:
Alpha: 1
Show Axes: false
@@ -138,6 +121,15 @@ Visualization Manager:
Alpha: 1
Show Axes: false
Show Trail: false
+ head_l515_mount_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ head_l515_virtual_mount_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
head_pan_link:
Alpha: 1
Show Axes: false
@@ -148,6 +140,14 @@ Visualization Manager:
Show Axes: false
Show Trail: false
Value: true
+ insta360_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ l515_head_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
l_gripper_finger_link:
Alpha: 1
Show Axes: false
@@ -455,6 +455,19 @@ Visualization Manager:
Name: RvizScenePublisher
Value: true
topic_name: /rviz/image
+ - Class: jsk_rviz_plugin/OverlayImage
+ Enabled: true
+ Name: OverlayImage
+ Topic: /smach_image_publisher/image
+ Value: true
+ alpha: 0.800000011920929
+ height: 128
+ keep aspect ratio: true
+ left: 650
+ overwrite alpha value: false
+ top: 10
+ transport hint: compressed
+ width: 300
Enabled: true
Global Options:
Background Color: 48; 48; 48
@@ -513,7 +526,7 @@ Window Geometry:
Height: 1052
Hide Left Dock: true
Hide Right Dock: true
- QMainWindow State: 000000ff00000000fd0000000400000000000001f800000382fc020000000bfb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f0070006500720074006900650073020000019b000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073000000003b000002f9000000c700fffffffb00000018004b0069006e00650063007400430061006d0065007200610000000373000000160000000000000000fb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261fb00000018004e006100720072006f007700430061006d0065007200610000000244000001460000000000000000fb0000001800430061006e00630065006c0041006300740069006f006e000000033a000000830000007900ffffff000000010000010f00000382fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073000000003b00000382000000a000fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000780000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000003f50000003efc0100000002fb0000000800540069006d00650100000000000003f50000024400fffffffb0000000800540069006d00650100000000000004500000000000000000000003f50000038200000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
+ QMainWindow State: 000000ff00000000fd0000000400000000000001f80000037efc020000000bfb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f0070006500720074006900650073020000019b000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073000000003d000002f5000000c900fffffffb00000018004b0069006e00650063007400430061006d0065007200610000000373000000160000000000000000fb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261fb00000018004e006100720072006f007700430061006d0065007200610000000244000001460000000000000000fb0000001800430061006e00630065006c0041006300740069006f006e0000000338000000830000007f00ffffff000000010000010f00000382fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073000000003b00000382000000a400fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000780000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000003f50000003efc0100000002fb0000000800540069006d00650100000000000003f5000002eb00fffffffb0000000800540069006d00650100000000000004500000000000000000000003f50000037e00000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Time:
@@ -524,4 +537,4 @@ Window Geometry:
collapsed: true
Width: 1013
X: 67
- Y: 180
+ Y: 134
diff --git a/jsk_fetch_robot/jsk_fetch_startup/config/sanity_targets.yaml b/jsk_fetch_robot/jsk_fetch_startup/config/sanity_targets.yaml
index 6b8ce4ff93..24a3521055 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/config/sanity_targets.yaml
+++ b/jsk_fetch_robot/jsk_fetch_startup/config/sanity_targets.yaml
@@ -2,8 +2,6 @@ topics:
- /audio
- /edgetpu_human_pose_estimator/output/image/compressed
- /edgetpu_object_detector/output/image/compressed
- - /head_camera/depth/image_raw
- - /head_camera/rgb/image_raw
nodes:
- /head_camera/head_camera_nodelet_manager
diff --git a/jsk_fetch_robot/jsk_fetch_startup/config/view_model.rviz b/jsk_fetch_robot/jsk_fetch_startup/config/view_model.rviz
new file mode 100644
index 0000000000..e8978465a4
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/config/view_model.rviz
@@ -0,0 +1,426 @@
+Panels:
+ - Class: rviz/Displays
+ Help Height: 78
+ Name: Displays
+ Property Tree Widget:
+ Expanded: ~
+ Splitter Ratio: 0.5
+ Tree Height: 728
+ - Class: rviz/Selection
+ Name: Selection
+ - Class: rviz/Tool Properties
+ Expanded:
+ - /2D Pose Estimate1
+ - /2D Nav Goal1
+ - /Publish Point1
+ Name: Tool Properties
+ Splitter Ratio: 0.5886790156364441
+ - Class: rviz/Views
+ Expanded:
+ - /Current View1
+ Name: Views
+ Splitter Ratio: 0.5
+ - Class: rviz/Time
+ Experimental: false
+ Name: Time
+ SyncMode: 0
+ SyncSource: ""
+Preferences:
+ PromptSaveOnExit: true
+Toolbars:
+ toolButtonStyle: 2
+Visualization Manager:
+ Class: ""
+ Displays:
+ - Alpha: 0.5
+ Cell Size: 1
+ Class: rviz/Grid
+ Color: 160; 160; 164
+ Enabled: true
+ Line Style:
+ Line Width: 0.029999999329447746
+ Value: Lines
+ Name: Grid
+ Normal Cell Count: 0
+ Offset:
+ X: 0
+ Y: 0
+ Z: 0
+ Plane: XY
+ Plane Cell Count: 10
+ Reference Frame:
+ Value: true
+ - Alpha: 0.5
+ Class: rviz/RobotModel
+ Collision Enabled: false
+ Enabled: true
+ Links:
+ All Links Enabled: true
+ Expand Joint Details: false
+ Expand Link Details: false
+ Expand Tree: false
+ Link Tree Style: Links in Alphabetic Order
+ base_camera_mount:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ base_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ bellows_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ bellows_link2:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ d435_front_left_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ d435_front_right_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ elbow_flex_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ estop_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ forearm_roll_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ gripper_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ head_box_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ head_camera_depth_frame:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ head_camera_depth_optical_frame:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ head_camera_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ head_camera_rgb_frame:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ head_camera_rgb_optical_frame:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ head_l515_mount_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ head_l515_virtual_mount_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ head_pan_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ head_tilt_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ insta360_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ l515_head_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ l_gripper_finger_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ l_wheel_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ laser_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ r_gripper_finger_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ r_wheel_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ shoulder_lift_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ shoulder_pan_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ torso_fixed_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ torso_lift_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ upperarm_roll_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ wrist_flex_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ wrist_roll_link:
+ Alpha: 1
+ Show Axes: false
+ Show Trail: false
+ Value: true
+ Name: RobotModel
+ Robot Description: robot_description
+ TF Prefix: ""
+ Update Interval: 0
+ Value: true
+ Visual Enabled: true
+ - Class: rviz/TF
+ Enabled: true
+ Frame Timeout: 15
+ Frames:
+ All Enabled: true
+ base_camera_mount:
+ Value: true
+ base_link:
+ Value: true
+ bellows_link:
+ Value: true
+ bellows_link2:
+ Value: true
+ d435_front_left_link:
+ Value: true
+ d435_front_right_link:
+ Value: true
+ elbow_flex_link:
+ Value: true
+ estop_link:
+ Value: true
+ forearm_roll_link:
+ Value: true
+ gripper_link:
+ Value: true
+ head_box_link:
+ Value: true
+ head_camera_depth_frame:
+ Value: true
+ head_camera_depth_optical_frame:
+ Value: true
+ head_camera_link:
+ Value: true
+ head_camera_rgb_frame:
+ Value: true
+ head_camera_rgb_optical_frame:
+ Value: true
+ head_l515_mount_link:
+ Value: true
+ head_l515_virtual_mount_link:
+ Value: true
+ head_pan_link:
+ Value: true
+ head_tilt_link:
+ Value: true
+ insta360_link:
+ Value: true
+ l515_head_link:
+ Value: true
+ l_gripper_finger_link:
+ Value: true
+ l_wheel_link:
+ Value: true
+ laser_link:
+ Value: true
+ r_gripper_finger_link:
+ Value: true
+ r_wheel_link:
+ Value: true
+ shoulder_lift_link:
+ Value: true
+ shoulder_pan_link:
+ Value: true
+ torso_fixed_link:
+ Value: true
+ torso_lift_link:
+ Value: true
+ upperarm_roll_link:
+ Value: true
+ wrist_flex_link:
+ Value: true
+ wrist_roll_link:
+ Value: true
+ Marker Scale: 0.5
+ Name: TF
+ Show Arrows: true
+ Show Axes: true
+ Show Names: true
+ Tree:
+ base_link:
+ base_camera_mount:
+ {}
+ d435_front_left_link:
+ {}
+ d435_front_right_link:
+ {}
+ estop_link:
+ {}
+ l_wheel_link:
+ {}
+ laser_link:
+ {}
+ r_wheel_link:
+ {}
+ torso_fixed_link:
+ {}
+ torso_lift_link:
+ bellows_link:
+ {}
+ bellows_link2:
+ {}
+ head_pan_link:
+ head_box_link:
+ {}
+ head_tilt_link:
+ head_camera_link:
+ head_camera_depth_frame:
+ head_camera_depth_optical_frame:
+ {}
+ head_camera_rgb_frame:
+ head_camera_rgb_optical_frame:
+ {}
+ head_l515_virtual_mount_link:
+ head_l515_mount_link:
+ l515_head_link:
+ {}
+ insta360_link:
+ {}
+ shoulder_pan_link:
+ shoulder_lift_link:
+ upperarm_roll_link:
+ elbow_flex_link:
+ forearm_roll_link:
+ wrist_flex_link:
+ wrist_roll_link:
+ gripper_link:
+ l_gripper_finger_link:
+ {}
+ r_gripper_finger_link:
+ {}
+ Update Interval: 0
+ Value: true
+ Enabled: true
+ Global Options:
+ Background Color: 48; 48; 48
+ Default Light: true
+ Fixed Frame: base_link
+ Frame Rate: 30
+ Name: root
+ Tools:
+ - Class: rviz/Interact
+ Hide Inactive Objects: true
+ - Class: rviz/MoveCamera
+ - Class: rviz/Select
+ - Class: rviz/FocusCamera
+ - Class: rviz/Measure
+ - Class: rviz/SetInitialPose
+ Theta std deviation: 0.2617993950843811
+ Topic: /initialpose
+ X std deviation: 0.5
+ Y std deviation: 0.5
+ - Class: rviz/SetGoal
+ Topic: /move_base_simple/goal
+ - Class: rviz/PublishPoint
+ Single click: true
+ Topic: /clicked_point
+ Value: true
+ Views:
+ Current:
+ Class: rviz/Orbit
+ Distance: 4.618305206298828
+ Enable Stereo Rendering:
+ Stereo Eye Separation: 0.05999999865889549
+ Stereo Focal Distance: 1
+ Swap Stereo Eyes: false
+ Value: false
+ Focal Point:
+ X: 0
+ Y: 0
+ Z: 0
+ Focal Shape Fixed Size: true
+ Focal Shape Size: 0.05000000074505806
+ Invert Z Axis: false
+ Name: Current View
+ Near Clip Distance: 0.009999999776482582
+ Pitch: 0.564796507358551
+ Target Frame:
+ Value: Orbit (rviz)
+ Yaw: 1.5854246616363525
+ Saved: ~
+Window Geometry:
+ Displays:
+ collapsed: false
+ Height: 1025
+ Hide Left Dock: false
+ Hide Right Dock: false
+ QMainWindow State: 000000ff00000000fd00000004000000000000015600000363fc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000003d00000363000000c900fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f00000363fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073010000003d00000363000000a400fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000007800000003efc0100000002fb0000000800540069006d0065010000000000000780000002eb00fffffffb0000000800540069006d006501000000000000045000000000000000000000050f0000036300000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
+ Selection:
+ collapsed: false
+ Time:
+ collapsed: false
+ Tool Properties:
+ collapsed: false
+ Views:
+ collapsed: false
+ Width: 1920
+ X: 0
+ Y: 27
diff --git a/jsk_fetch_robot/jsk_fetch_startup/config/warning_blacklist.yaml b/jsk_fetch_robot/jsk_fetch_startup/config/warning_blacklist.yaml
new file mode 100644
index 0000000000..54dc6a28f6
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/config/warning_blacklist.yaml
@@ -0,0 +1,15 @@
+blacklist:
+ - name: "/CPU/CPU Usage/my_machine CPU Usage"
+ - name: "/Other/amcl: Standard deviation"
+ - name: "/Other/jsk_joy_node: Joystick Driver Status"
+ - name: "/Other/l515_head .*realsense2_camera_.*: Frequency Status"
+ - name: "/Other/rosserial_python"
+ - name: "/Peripherals/PS3 Controller"
+ - name: "/Sensors/IMU/IMU.*"
+ - name: "/SoundPlay/sound_play.*"
+run_stop_blacklist:
+ - name: "/Motor Control Boards/.*_(mcb|breaker)"
+ - name: "/System/Mainboard/Mainboard"
+ message: "Runstop pressed"
+ - name: "/Breakers/.*"
+ message: "Disabled."
diff --git a/jsk_fetch_robot/jsk_fetch_startup/cron_scripts/cron_certbot.conf b/jsk_fetch_robot/jsk_fetch_startup/cron_scripts/cron_certbot.conf
new file mode 100644
index 0000000000..8c7cc3ea3b
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/cron_scripts/cron_certbot.conf
@@ -0,0 +1 @@
+0 0 1 Jan,Apr,Jul,Oct * bash -c ". /home/fetch/ros/melodic/devel/setup.bash && systemctl stop haproxy && certbot renew -v --standalone --renew-hook \"$(rospack find jsk_fetch_startup)/scripts/certbot_renewhook.sh\" >> /var/log/certbot_renewal.log"
diff --git a/jsk_fetch_robot/jsk_fetch_startup/cron_scripts/cron_fetch.conf b/jsk_fetch_robot/jsk_fetch_startup/cron_scripts/cron_fetch.conf
new file mode 100644
index 0000000000..03fadaf878
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/cron_scripts/cron_fetch.conf
@@ -0,0 +1,2 @@
+0 3 * * * bash -c ". /home/fetch/ros/melodic/devel/setup.bash && rosrun jsk_fetch_startup update_workspace.sh &> /home/fetch/ros/melodic/update_workspace.log"
+0 5 * * * bash -c ". /home/fetch/ros/melodic/devel/setup.bash && rosrun jsk_fetch_startup storage_warning.sh &> /home/fetch/ros/melodic/storage_warning.log"
diff --git a/jsk_fetch_robot/jsk_fetch_startup/cron_scripts/cron_root.conf b/jsk_fetch_robot/jsk_fetch_startup/cron_scripts/cron_root.conf
new file mode 100644
index 0000000000..da33972f7e
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/cron_scripts/cron_root.conf
@@ -0,0 +1 @@
+0 4 * * * /sbin/shutdown -r now
diff --git a/jsk_fetch_robot/jsk_fetch_startup/data/burnable.png b/jsk_fetch_robot/jsk_fetch_startup/data/burnable.png
new file mode 100644
index 0000000000..6b00521962
Binary files /dev/null and b/jsk_fetch_robot/jsk_fetch_startup/data/burnable.png differ
diff --git a/jsk_fetch_robot/jsk_fetch_startup/data/icmark.png b/jsk_fetch_robot/jsk_fetch_startup/data/icmark.png
new file mode 100644
index 0000000000..125b739436
Binary files /dev/null and b/jsk_fetch_robot/jsk_fetch_startup/data/icmark.png differ
diff --git a/jsk_fetch_robot/jsk_fetch_startup/data/plastic.png b/jsk_fetch_robot/jsk_fetch_startup/data/plastic.png
new file mode 100644
index 0000000000..e1df1b97aa
Binary files /dev/null and b/jsk_fetch_robot/jsk_fetch_startup/data/plastic.png differ
diff --git a/jsk_fetch_robot/jsk_fetch_startup/euslisp/go-to-kitchen.l b/jsk_fetch_robot/jsk_fetch_startup/euslisp/go-to-kitchen.l
index d610d09c00..1f53a3d8bb 100755
--- a/jsk_fetch_robot/jsk_fetch_startup/euslisp/go-to-kitchen.l
+++ b/jsk_fetch_robot/jsk_fetch_startup/euslisp/go-to-kitchen.l
@@ -1,8 +1,481 @@
#!/usr/bin/env roseus
(require :fetch-interface "package://fetcheus/fetch-interface.l")
+(require :state-machine "package://roseus_smach/src/state-machine.l")
+(require :state-machine-ros "package://roseus_smach/src/state-machine-ros.l")
+(require :state-machine-utils "package://roseus_smach/src/state-machine-utils.l")
+(require :base64 "lib/llib/base64.l")
+
(load "package://jsk_fetch_startup/euslisp/navigation-utils.l")
+(ros::advertise "/tweet" std_msgs::String 1)
+(ros::advertise "/photo_taken" sensor_msgs::Image 1)
+(setq *image* nil)
+
+(defun image-cb (msg)
+ (setq *image* msg))
+
+(defun go-to-kitchen (&key (tweet t) (n-dock-trial 1) (n-kitchen-trial 1)
+ (control-switchbot :api))
+ ;; go to kitchen
+ (unless (boundp '*ri*)
+ (require :fetch-interface "package://fetcheus/fetch-interface.l")
+ (fetch-init))
+ (report-start-go-to-kitchen)
+ ;; Check if the lights are on in the room
+ (let ((initial-light-on (get-light-on))
+ (success-go-to-kitchen nil)
+ (success-go-to-trashcan nil)
+ (success-auto-dock nil)
+ (success-battery-charging nil))
+ (store-params)
+ ;; turn on light
+ (if initial-light-on
+ (report-light-on)
+ (progn
+ (report-light-off)
+ (room-light-on :control-switchbot control-switchbot)))
+ ;; change the inflation_radius
+ (inflation-loose)
+ ;; go to kitchen sink
+ (setq success-go-to-kitchen (move-to-sink-front :n-trial n-kitchen-trial))
+ ;; report result to go to kitchen
+ (if success-go-to-kitchen
+ (inspect-kitchen :tweet tweet)
+ (report-move-to-sink-front-failure))
+ ;; go to kitchen trash can
+ (setq success-go-to-trashcan (move-to-trashcan-front :n-trial n-trashcan-trial))
+ ;; report result to go to trash can
+ (if success-go-to-trashcan
+ (inspect-trashcan :tweet tweet)
+ (report-move-to-trashcan-front-failure))
+ ;; go back from dock
+ (report-auto-dock)
+ (setq success-auto-dock (auto-dock :n-trial n-dock-trial :clear-costmap nil))
+ ;; turn off light
+ (if (and success-auto-dock (not initial-light-on))
+ (room-light-off :control-switchbot control-switchbot))
+ ;; change the inflation_radius
+ (restore-params)
+ (send-kitchen-mail)
+ (setq success-battery-charging (progn (wait-until-is-charging)
+ (equal (get-battery-charging-state) :charging)))
+ (and success-go-to-kitchen success-auto-dock success-battery-charging)))
+
+(defun go-to-kitchen-state-machine ()
+ (setq *sm*
+ (make-state-machine
+ '((:init -> :report-start-go-to-kitchen)
+ (:report-start-go-to-kitchen -> :get-light-on)
+ (:get-light-on -> :report-light-on)
+ (:get-light-on !-> :room-light-on)
+ (:report-light-on -> :move-to-dock-front)
+ (:room-light-on -> :move-to-dock-front)
+
+ (:move-to-dock-front -> :inspect-dock-front)
+ (:move-to-dock-front !-> :report-move-to-dock-front-failure)
+ (:inspect-dock-front -> :move-to-tv-front)
+ (:report-move-to-dock-front-failure -> :move-to-tv-front)
+
+ (:move-to-tv-front -> :inspect-tv-front)
+ (:move-to-tv-front !-> :report-move-to-tv-front-failure)
+ (:inspect-tv-front -> :move-to-tv-desk)
+ (:report-move-to-tv-front-failure -> :move-to-tv-desk)
+
+ (:move-to-tv-desk -> :inspect-tv-desk)
+ (:move-to-tv-desk !-> :report-move-to-tv-desk-failure)
+ (:inspect-tv-desk -> :move-to-desk-back)
+ (:report-move-to-tv-desk-failure -> :move-to-desk-back)
+
+ (:move-to-desk-back -> :inspect-desk-back)
+ (:move-to-desk-back !-> :report-move-to-desk-back-failure)
+ (:inspect-desk-back -> :move-to-desk-front)
+ (:report-move-to-desk-back-failure -> :move-to-desk-front)
+
+ (:move-to-desk-front -> :inspect-desk-front)
+ (:move-to-desk-front !-> :report-move-to-desk-front-failure)
+ (:inspect-desk-front -> :move-to-kitchen-door-front)
+ (:report-move-to-desk-front-failure -> :move-to-kitchen-door-front)
+
+ (:move-to-kitchen-door-front -> :inspect-kitchen-door-front)
+ (:move-to-kitchen-door-front !-> :report-move-to-kitchen-door-front-failure)
+ (:inspect-kitchen-door-front -> :move-to-sink-front)
+ (:report-move-to-kitchen-door-front-failure -> :move-to-sink-front)
+
+ (:move-to-sink-front -> :inspect-kitchen)
+ (:move-to-sink-front !-> :report-move-to-sink-front-failure)
+ ;;(:inspect-kitchen -> :auto-dock)
+ (:report-move-to-sink-front-failure -> :auto-dock)
+ (:inspect-kitchen -> :move-to-trashcan-front)
+ (:move-to-trashcan-front -> :inspect-trashcan)
+ (:move-to-trashcan-front !-> :report-move-to-trashcan-front-failure)
+ (:inspect-trashcan -> :auto-dock)
+ (:report-move-to-trashcan-front-failure -> :auto-dock)
+ (:auto-dock -> :room-light-off)
+ (:auto-dock !-> :auto-dock-failure)
+ (:auto-dock-failure -> :room-light-off)
+ (:room-light-off -> :finish)
+ (:finish -> t)
+ (:finish !-> nil))
+ '((:init
+ '(lambda (userdata)
+ (fetch-init)
+ (if (send *ri* :simulation-modep)
+ (progn
+ (load "models/room73b2-scene.l")
+ (load "package://jsk_maps/src/eng2-scene.l")
+ (room73b2)
+ (setq *base-spot* "/eng2/7f/room73B2-base")
+ (setq *scene* (make-eng2-7f-scene))
+ (send *ri* :objects (send *room73b2* :objects))
+ (send (send *ri* :robot)
+ :newcoords (car (get-spot-coords "/eng2/7f/room73B2-center")))
+ ))
+ (undock)
+ (send *ri* :clear-costmap)
+ (store-params)
+ (inflation-loose)
+ (clear-app-notification)
+ (ros::subscribe "/head_camera/rgb/image_rect_color/compressed"
+ sensor_msgs::CompressedImage #'image-cb)
+ t))
+ (:report-start-go-to-kitchen
+ '(lambda (userdata)
+ (report-start-go-to-kitchen)
+ (set-alist 'description "キッチンを見に行くよ" userdata)
+ (set-alist 'image "" userdata)
+ t))
+ (:get-light-on
+ '(lambda (userdata)
+ (let ((light-on (get-light-on)))
+ (setf (cdr (assoc 'initial-light-on userdata)) light-on)
+ (ros::spin-once)
+ (if light-on
+ (set-alist 'description "電気がついていたよ" userdata)
+ (set-alist 'description "電気がついていなかったよ" userdata))
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ light-on)))
+ (:report-light-on
+ '(lambda (userdata)
+ (report-light-on)
+ (set-alist 'description "" userdata)
+ (set-alist 'image "" userdata)
+ t))
+ (:room-light-on
+ '(lambda (userdata)
+ (let ((control-switchbot (cdr (assoc 'control-switchbot userdata)))
+ (label-names (notify-recognition :location "on the way to kitchen")))
+ (report-light-off)
+ (room-light-on :control-switchbot control-switchbot)
+ (ros::spin-once)
+ (set-alist 'description "電気をつけたよ" userdata)
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ t)))
+ (:move-to-dock-front
+ '(lambda (userdata)
+ (let* ((n-trial (cdr (assoc 'n-dock-front-trial userdata)))
+ (success (move-to-dock-front :n-trial n-trial))
+ (label-names (notify-recognition :location "on the way to kitchen")))
+ (setf (cdr (assoc 'success-go-to-dock-front userdata)) success)
+ (ros::spin-once)
+ (if success
+ (set-alist 'description "ドックの前に移動したよ" userdata)
+ (set-alist 'description "ドックの前に移動しようとしたけど,迷子になっちゃった" userdata))
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ success)))
+ (:inspect-dock-front
+ '(lambda (userdata)
+ (let* ((label-names (notify-recognition :location "on the way to kitchen")))
+ (inspect-dock-front :tweet (cdr (assoc 'tweet userdata)))
+ (ros::spin-once)
+ (set-alist 'description "ドックの前の様子を見たよ" userdata)
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ t)))
+ (:report-move-to-dock-front-failure
+ '(lambda (userdata)
+ (let* ((label-names (notify-recognition :location "on the way to kitchen")))
+ (report-move-to-dock-front-failure)
+ (ros::spin-once)
+ (set-alist 'description "ドックの前に移動できなかったよ" userdata)
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ t)))
+ (:move-to-tv-front
+ '(lambda (userdata)
+ (let* ((n-trial (cdr (assoc 'n-tv-front-trial userdata)))
+ (success (move-to-tv-front :n-trial n-trial)))
+ (setf (cdr (assoc 'success-go-to-tv-front userdata)) success)
+ (ros::spin-once)
+ (if success
+ (set-alist 'description "テレビの前に移動したよ" userdata)
+ (set-alist 'description "テレビの前に移動しようとしたけど,迷子になっちゃった" userdata))
+ (set-alist 'image "" userdata)
+ success)))
+ (:inspect-tv-front
+ '(lambda (userdata)
+ (let* ((label-names (notify-recognition :location "on the way to kitchen")))
+ (inspect-tv-front :tweet (cdr (assoc 'tweet userdata)))
+ (ros::spin-once)
+ (set-alist 'description "テレビの前の様子を見たよ" userdata)
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ t)))
+ (:report-move-to-tv-front-failure
+ '(lambda (userdata)
+ (let* ((label-names (notify-recognition :location "on the way to kitchen")))
+ (report-move-to-tv-front-failure)
+ (ros::spin-once)
+ (set-alist 'description "テレビの前に移動できなかったよ" userdata)
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ t)))
+ (:move-to-tv-desk
+ '(lambda (userdata)
+ (let* ((n-trial (cdr (assoc 'n-tv-desk-trial userdata)))
+ (success (move-to-tv-desk :n-trial n-trial))
+ (label-names (notify-recognition :location "on the way to kitchen")))
+ (setf (cdr (assoc 'success-go-to-tv-desk userdata)) success)
+ (ros::spin-once)
+ (if success
+ (set-alist 'description "机の前に移動したよ" userdata)
+ (set-alist 'description "机の前に移動しようとしたけど,迷子になっちゃった" userdata))
+ (set-alist 'image "" userdata)
+ success)))
+ (:inspect-tv-desk
+ '(lambda (userdata)
+ (let* ((label-names (notify-recognition :location "on the way to kitchen")))
+ (inspect-tv-desk :tweet (cdr (assoc 'tweet userdata)))
+ (ros::spin-once)
+ (set-alist 'description "机の様子を確認したよ" userdata)
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ t)))
+ (:report-move-to-tv-desk-failure
+ '(lambda (userdata)
+ (let* (label-names (notify-recognition :location "on the way to kitchen"))
+ (report-move-to-tv-desk-failure)
+ (ros::spin-once)
+ (set-alist 'description "机の前に移動できなかったよ" userdata)
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ t)))
+ (:move-to-desk-back
+ '(lambda (userdata)
+ (let* ((n-trial (cdr (assoc 'n-desk-back-trial userdata)))
+ (success (move-to-desk-back :n-trial n-trial))
+ (label-names (notify-recognition :location "on the way to kitchen")))
+ (setf (cdr (assoc 'success-go-to-desk-back userdata)) success)
+ (ros::spin-once)
+ (if success
+ (set-alist 'description "部屋の後ろに移動したよ" userdata)
+ (set-alist 'description "部屋の後ろに移動しようとしたけど,迷子になっちゃった" userdata))
+ (set-alist 'image "" userdata)
+ success)))
+ (:inspect-desk-back
+ '(lambda (userdata)
+ (let* ((label-names (notify-recognition :location "on the way to kitchen")))
+ (inspect-desk-back :tweet (cdr (assoc 'tweet userdata)))
+ (ros::spin-once)
+ (set-alist 'description "部屋の後ろを確認したよ" userdata)
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ t)))
+ (:report-move-to-desk-back-failure
+ '(lambda (userdata)
+ (let* ((label-names (notify-recognition :location "on the way to kitchen")))
+ (report-move-to-desk-back-failure)
+ (ros::spin-once)
+ (set-alist 'description "部屋の後ろに移動できなかったよ" userdata)
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ t)))
+ (:move-to-desk-front
+ '(lambda (userdata)
+ (let* ((n-trial (cdr (assoc 'n-desk-front-trial userdata)))
+ (success (move-to-desk-front :n-trial n-trial)))
+ (setf (cdr (assoc 'success-go-to-desk-front userdata)) success)
+ (ros::spin-once)
+ (if success
+ (set-alist 'description "部屋の前に移動したよ" userdata)
+ (set-alist 'description "部屋の前に移動しようとしたけど,迷子になっちゃった" userdata))
+ (set-alist 'image "" userdata)
+ success)))
+ (:inspect-desk-front
+ '(lambda (userdata)
+ (let* ((label-names (notify-recognition :location "on the way to kitchen")))
+ (inspect-desk-front :tweet (cdr (assoc 'tweet userdata)))
+ (ros::spin-once)
+ (set-alist 'description "部屋の前を確認したよ" userdata)
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ t)))
+ (:report-move-to-desk-front-failure
+ '(lambda (userdata)
+ (let* ((label-names (notify-recognition :location "on the way to kitchen")))
+ (report-move-to-desk-front-failure)
+ (ros::spin-once)
+ (set-alist 'description "部屋の前に移動できなかったよ" userdata)
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ t)))
+ (:move-to-kitchen-door-front
+ '(lambda (userdata)
+ (let* ((n-trial (cdr (assoc 'n-kitchen-door-front-trial userdata)))
+ (success (move-to-kitchen-door-front :n-trial n-trial)))
+ (setf (cdr (assoc 'success-go-to-tv-desk userdata)) success)
+ (ros::spin-once)
+ (if success
+ (set-alist 'description "ドアの前に移動したよ" userdata)
+ (set-alist 'description "ドアの前に移動しようとしたけど,迷子になっちゃった" userdata))
+ (set-alist 'image "" userdata)
+ success)))
+ (:inspect-kitchen-door-front
+ '(lambda (userdata)
+ (let* ((label-names (notify-recognition :location "kitchen-door-front")))
+ (inspect-kitchen-door-front :tweet (cdr (assoc 'tweet userdata)))
+ (ros::spin-once)
+ (set-alist 'description "ドアの前からキッチンの様子を見たよ" userdata)
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ t)))
+ (:report-move-to-kitchen-door-front-failure
+ '(lambda (userdata)
+ (report-move-to-kitchen-door-front-failure)
+ (ros::spin-once)
+ (set-alist 'description "ドアの前に移動できなかったよ" userdata)
+ (set-alist 'image "" userdata)
+ t))
+ (:move-to-sink-front
+ '(lambda (userdata)
+ (let* ((n-trial (cdr (assoc 'n-kitchen-trial userdata)))
+ (success (move-to-sink-front :n-trial n-trial))
+ (label-names (notify-recognition :location "on the way to kitchen")))
+ (setf (cdr (assoc 'success-go-to-kitchen userdata)) success)
+ (ros::spin-once)
+ (if success
+ (set-alist 'description "キッチンに移動したよ" userdata)
+ (set-alist 'description "キッチンに移動しようとしたけど,迷子になっちゃった" userdata))
+ (set-alist 'image "" userdata)
+ success)))
+ (:inspect-kitchen
+ '(lambda (userdata)
+ (let* ((label-names (notify-recognition :location "kitchen"))
+ (notify-text (if label-names (format nil "~Aがあったよ" label-names) "")))
+ (inspect-kitchen :tweet (cdr (assoc 'tweet userdata)))
+ (ros::spin-once)
+ (set-alist 'description (format nil "キッチンの様子を見たよ。~A" notify-text) userdata)
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ t)))
+ (:report-move-to-sink-front-failure
+ '(lambda (userdata)
+ (let* ((label-names (notify-recognition :location "on the way to sink-front")))
+ (report-move-to-sink-front-failure)
+ (ros::spin-once)
+ (set-alist 'description "キッチンに行けなかったよ" userdata)
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ t)))
+ (:move-to-trashcan-front
+ '(lambda (userdata)
+ (let* ((n-trial (cdr (assoc 'n-trashcan-trial userdata)))
+ (success (move-to-trashcan-front :n-trial n-trial))
+ (label-names (notify-recognition :location "on the way to kitchen")))
+ (setf (cdr (assoc 'success-go-to-trashcan userdata)) success)
+ (ros::spin-once)
+ (if success
+ (set-alist 'description "ゴミ箱の前に移動したよ" userdata)
+ (set-alist 'description "ゴミ箱の前に移動しようとしたけど,迷子になっちゃった" userdata))
+ (set-alist 'image "" userdata)
+ success)))
+ (:inspect-trashcan
+ '(lambda (userdata)
+ (inspect-trashcan :tweet (cdr (assoc 'tweet userdata)))
+ (ros::spin-once)
+ (set-alist 'description "ゴミ箱の様子を確認したよ" userdata)
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ t))
+ (:report-move-to-trashcan-front-failure
+ '(lambda (userdata)
+ (report-move-to-trashcan-front-failure)
+ (ros::spin-once)
+ (set-alist 'description "ゴミ箱の前に行けなかったよ" userdata)
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ t))
+ (:auto-dock
+ '(lambda (userdata)
+ (report-auto-dock)
+ (let* ((n-trial (cdr (assoc 'n-dock-trial userdata)))
+ (success (auto-dock :n-trial n-trial :clear-costmap nil)))
+ (setf (cdr (assoc 'success-auto-dock userdata)) success)
+ (ros::spin-once)
+ (if success
+ (set-alist 'description "帰ってきたよ" userdata)
+ (set-alist 'description "帰ってこようとしたけど,迷子になっちゃった" userdata))
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ success)))
+ (:auto-dock-failure
+ '(lambda (userdata)
+ (report-auto-dock-failure)
+ (ros::spin-once)
+ (set-alist 'description "帰ってこられなかったよ" userdata)
+ (if *image*
+ (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
+ (set-alist 'image "" userdata))
+ t))
+ (:room-light-off
+ '(lambda (userdata)
+ (let ((success-auto-dock (cdr (assoc 'success-auto-dock userdata)))
+ (initial-light-on (cdr (assoc 'initial-light-on userdata)))
+ (control-switchbot (cdr (assoc 'control-switchbot userdata))))
+ (if (and success-auto-dock (not initial-light-on))
+ (progn
+ (room-light-off :control-switchbot control-switchbot)
+ (ros::spin-once)
+ (set-alist 'description "電気を消したよ" userdata)
+ (set-alist 'image "" userdata))))
+ t))
+ (:finish
+ '(lambda (userdata)
+ (let ((success-battery-charging
+ (progn (wait-until-is-charging)
+ (equal (get-battery-charging-state) :charging)))
+ (success-auto-dock (cdr (assoc 'success-auto-dock userdata)))
+ (success-go-to-kitchen
+ (cdr (assoc 'success-go-to-kitchen userdata))))
+ (restore-params)
+ (ros::spin-once)
+ (set-alist 'description "キッチンデモを終えるよ" userdata)
+ (set-alist 'image "" userdata)
+ (and success-go-to-kitchen success-auto-dock success-battery-charging)))))
+ '(:init)
+ '(t nil))))
(defun main (&key (tweet t) (n-dock-trial 3) (n-kitchen-trial 3) (n-trashcan-trial 3) (n-dock-front-trial 3) (n-tv-front-trial 3) (n-tv-desk-trial 3) (n-desk-back-trial 3) (n-desk-front-trial 3) (n-kitchen-door-front-trial 3) (control-switchbot :api))
(when (not (boundp '*sm*))
diff --git a/jsk_fetch_robot/jsk_fetch_startup/euslisp/navigation-utils.l b/jsk_fetch_robot/jsk_fetch_startup/euslisp/navigation-utils.l
index 13bdcee901..11cf8a9218 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/euslisp/navigation-utils.l
+++ b/jsk_fetch_robot/jsk_fetch_startup/euslisp/navigation-utils.l
@@ -1,23 +1,21 @@
(load "package://jsk_robot_startup/lifelog/tweet_client.l")
(load "package://jsk_fetch_startup/euslisp/notify-app.l")
-(load "package://switchbot_ros/scripts/switchbot.l")
-(require :state-machine "package://roseus_smach/src/state-machine.l")
-(require :state-machine-ros "package://roseus_smach/src/state-machine-ros.l")
-(require :state-machine-utils "package://roseus_smach/src/state-machine-utils.l")
-(require :base64 "lib/llib/base64.l")
+(if (ros::rospack-find "switchbot_ros")
+ (load "package://switchbot_ros/scripts/switchbot.l"))
(ros::load-ros-manifest "fetch_auto_dock_msgs")
(ros::load-ros-manifest "jsk_robot_startup")
(ros::load-ros-manifest "jsk_recognition_msgs")
(ros::load-ros-manifest "power_msgs")
+(ros::load-ros-manifest "sensor_msgs")
+(if (ros::rospack-find "smart_device_protocol")
+ (ros::load-ros-manifest "smart_device_protocol"))
(defparameter *dock-action* nil)
(defparameter *undock-action* nil)
(defparameter *spots* nil)
(defparameter *tfl* (instance ros::transform-listener :init))
-(ros::advertise "/photo_taken" sensor_msgs::Image 1)
-
(let ((robot-name (ros::get-param "/robot/name")))
(defparameter *dock-spot*
(cond
@@ -25,7 +23,7 @@
"/eng2/7f/room73B2-fetch-dock-front")
((equal robot-name "fetch1075")
"/eng2/7f/room73B2-fetch-dock2-front")
- (t nil))))
+ (t "/eng2/7f/room73B2-fetch-dock2-front"))))
(defun store-params ()
@@ -37,14 +35,18 @@
(defun restore-params ()
- (if (boundp '*global-inflation-radius*)
- (ros::set-dynamic-reconfigure-param
- "/move_base/global_costmap/inflater" "inflation_radius"
- :double *global-inflation-radius*))
- (if (boundp '*local-inflation-radius*)
- (ros::set-dynamic-reconfigure-param
- "/move_base/local_costmap/inflater" "inflation_radius"
- :double *local-inflation-radius*))
+ (let ((global-costmap-server "/move_base/global_costmap/inflater")
+ (local-costmap-server "/move_base/local_costmap/inflater"))
+ (if (and (boundp '*global-inflation-radius*)
+ (ros::wait-for-service (format nil "~A/set_parameters" global-costmap-server) 1))
+ (ros::set-dynamic-reconfigure-param
+ "/move_base/global_costmap/inflater" "inflation_radius"
+ :double *global-inflation-radius*))
+ (if (and (boundp '*local-inflation-radius*)
+ (ros::wait-for-service (format nil "~A/set_parameters" local-costmap-server) 1))
+ (ros::set-dynamic-reconfigure-param
+ "/move_base/local_costmap/inflater" "inflation_radius"
+ :double *local-inflation-radius*)))
t)
@@ -62,17 +64,26 @@
(defun get-spot-coords (name)
- (unless *spots*
- (setq *spots* (one-shot-subscribe "/spots_marker_array" visualization_msgs::MarkerArray)))
- (let ((spot-coords nil) (frame-id nil))
- (dolist (x (send *spots* :markers))
- (if (equal (send x :text) name)
- (progn
- (setq spot-coords (send x :pose))
- (setq frame-id (send (send x :header) :frame_id)))))
- (send (send spot-coords :position) :z 0)
- (setq spot-coords (ros::tf-pose->coords spot-coords))
- (cons spot-coords frame-id)))
+ (if (send *ri* :simulation-modep)
+ (let ((base-coords (send *scene* :spot *base-spot*))
+ (spot-coords (send *scene* :spot name))
+ (goal-coords nil))
+ (if (and base-coords spot-coords)
+ (setq goal-coords (send base-coords :transformation spot-coords)))
+ (cons goal-coords nil))
+ (progn
+ (unless *spots*
+ (setq *spots* (one-shot-subscribe "/spots_marker_array" visualization_msgs::MarkerArray)))
+ (let ((spot-coords nil) (frame-id nil))
+ (dolist (x (send *spots* :markers))
+ (if (equal (send x :text) name)
+ (progn
+ (setq spot-coords (send x :pose))
+ (setq frame-id (send (send x :header) :frame_id)))))
+ (send (send spot-coords :position) :z 0)
+ (setq spot-coords (ros::tf-pose->coords spot-coords))
+ (cons spot-coords frame-id))
+ )))
(defun simple-dock (&key (use-pose t))
@@ -82,7 +93,7 @@
"/dock" fetch_auto_dock_msgs::DockAction)))
(unless (send *dock-action* :wait-for-server 5)
(ros::ros-error "/dock action server is not started")
- (return-from dock nil))
+ (return-from simple-dock nil))
(let ((dock-action-goal (instance fetch_auto_dock_msgs::DockActionGoal :init)))
(when use-pose
(let* ((timestamp (ros::time-now))
@@ -117,7 +128,7 @@
(simple-dock))
-(defun undock ()
+(defun undock (&key (rotate-in-place nil))
(unless *undock-action*
(setq *undock-action*
(instance ros::simple-action-client :init
@@ -126,14 +137,47 @@
(ros::ros-error "/undock action server is not started")
(return-from undock nil))
(send *undock-action* :send-goal
- (instance fetch_auto_dock_msgs::UndockActionGoal :init))
+ (instance fetch_auto_dock_msgs::UndockActionGoal :init
+ :goal (instance fetch_auto_dock_msgs::UndockGoal :rotate_in_place rotate-in-place)))
(unless (send *undock-action* :wait-for-result :timeout 60)
(ros::ros-error "No result returned from /undock action server")
(return-from undock nil))
(send (send *undock-action* :get-result) :undocked))
+(defun wait-until-is-charging (&key (timeout 10))
+ """
+ Wait for updating battery charging state especially when robots dock.
+ Args:
+ - key
+ timeout [sec]: Set waiting time for updating /battery_state topic
+
+ ;; If /battery_state is subscribed before /battery_state becomes true
+ ;; while dock succeeds, the result will not be correct,
+ ;; so wait for a certain time when docking.
+ """
+ (if (send *ri* :simulation-modep) (return-from wait-until-is-charging nil))
+ (let* ((msg nil)
+ (is-charging nil)
+ (duration 0)
+ (start-time (send (ros::time-now) :sec)))
+ (while (not is-charging)
+ (when (> duration timeout)
+ (ros::ros-warn "Skip waiting for charging state because of timeout")
+ (return-from wait-until-is-charging :timeout))
+ (setq msg (one-shot-subscribe "/battery_state" power_msgs::BatteryState
+ :timeout 1000))
+ (if msg (setq is-charging (send msg :is_charging)))
+ (setq duration (- (send (ros::time-now) :sec) start-time)))
+ :charging))
(defun get-battery-charging-state (&key (timeout 1500))
+ """
+ Get battery charging state
+ Args:
+ - key
+ timeout: Set waiting time for topic.
+ """
+ (if (send *ri* :simulation-modep) (return-from get-battery-charging-state nil))
(let* ((msg (one-shot-subscribe "/battery_state" power_msgs::batterystate :timeout timeout))
(is-charging (if msg (send msg :is_charging))))
;; You may fail to subscribe /battery_state
@@ -141,7 +185,6 @@
(if (not msg) (return-from get-battery-charging-state nil))
(if is-charging :charging :discharging)))
-
(defun go-to-spot (name &key (relative-pos nil) (relative-rot nil) (undock-rotate nil) (clear-costmap t))
"Move the robot to the spot defined in /spots_marker_array topic. The reason for using relative-pos and relative-rot instead of relative-coords is that it is easier to understand if relative-pos and relative-rot are specified in the different coords (specifically, world (map) and local (spot) coords respectively). For detail, see https://github.com/jsk-ros-pkg/jsk_robot/pull/1458#pullrequestreview-1039654868
Args:
@@ -169,10 +212,7 @@ Args:
(return-from go-to-spot-undock t))
(if (equal battery-charging-state :charging)
(progn
- (setq undock-success (auto-undock :n-trial 3))
- ;; rotate after undock
- (if (and undock-success undock-rotate)
- (send *ri* :go-pos-unsafe 0 0 180)))
+ (setq undock-success (auto-undock :n-trial 3 :rotate-in-place undock-rotate)))
(return-from go-to-spot-undock t))
(if (not undock-success)
(progn
@@ -187,7 +227,9 @@ Args:
(setq goal-pose (send goal-pose :translate relative-pos :world)))
(when relative-rot
(setq goal-pose (send goal-pose :rotate relative-rot :z :local)))
- (send *ri* :move-to goal-pose :frame-id frame-id)))
+ (if frame-id
+ (send *ri* :move-to goal-pose :frame-id frame-id)
+ (send *ri* :move-to goal-pose))))
(defun auto-dock (&key (n-trial 1) (clear-costmap t))
@@ -197,19 +239,19 @@ Args:
:relative-pos #f(-800 0 0)
:clear-costmap clear-costmap)
(ros::ros-info "arrived at the dock.")
- (setq success (dock))
+ (setq success (if (send *ri* :simulation-modep) t (dock)))
(when success (return-from auto-dock success))))
success))
-(defun auto-undock (&key (n-trial 1))
+(defun auto-undock (&key (n-trial 1) (rotate-in-place nil))
(let ((success nil))
(unless (boundp '*ri*)
(require :fetch-interface "package://fetcheus/fetch-interface.l")
(fetch-init))
(dotimes (i n-trial)
(ros::ros-info "trying to do undock.")
- (setq success (undock))
+ (setq success (undock :rotate-in-place rotate-in-place))
(when success (return-from auto-undock success)))
(if (not success)
(let ((enable-request (instance power_msgs::BreakerCommandRequest :init :enable t))
@@ -288,7 +330,7 @@ Args:
(ros::ros-info "start going back to the dock.")
(send *ri* :speak-jp "ドックに戻ります。" :wait t))
-(defun report-move-to-sink-front-success ()
+(defun report-move-to-sink-front ()
(ros::ros-info "arrived at the kitchen stove.")
(send *ri* :speak-jp "キッチンのコンロの前につきました。" :wait t))
@@ -382,10 +424,17 @@ Args:
(defun notify-recognition (&key (location "kitchen"))
(let* ((msg (one-shot-subscribe "/edgetpu_object_detector/output/class"
- jsk_recognition_msgs::ClassificationResult))
- (label-names (send msg :label_names)))
+ jsk_recognition_msgs::ClassificationResult
+ :timeout 3000))
+ (label-names (if msg (send msg :label_names))))
(when label-names
(ros::ros-info (format nil "Notify app that ~A is found." label-names))
+ (write-message-on-message-board
+ (list 120 33 132 149 126 152)
+ (format nil "Notify app that ~A is found." label-names)
+ (ros::time 600)
+ (ros::get-param "/robot/name" "default_name")
+ )
(notify-app "object recognition"
(send msg :header :stamp)
location
@@ -403,8 +452,32 @@ Args:
location
(format nil "CO2 concentration is ~A ppm" (send msg :data))))))
+(defun notify-trashcan-occupancy (&key (location "kitchen"))
+ (let* ((msg (one-shot-subscribe "/trashbin_occupancy_detector/container/occupancies"
+ jsk_recognition_msgs::BoundingBoxArray
+ :timeout 3000))
+ (occupancy (if msg (send (elt (send msg :boxes) 0) :value)))
+ (notify-text (if occupancy (if (> occupancy 1.0)
+ "Trashcan is full."
+ "Trashcan is not full."))))
+ (when occupancy
+ (ros::ros-info
+ (format nil "Notify app that the occupancy of trash can is measured. ~A." occupancy))
+ (write-message-on-message-board
+ (list 120 33 132 149 126 152)
+ (format nil "~A Trashcan occupancy is ~A" notify-text occupancy)
+ (ros::time 600)
+ (ros::get-param "/robot/name" "default_name")
+ )
+ (notify-app "trashcan occupancy"
+ (ros::time-now)
+ location
+ (format nil "~A Trashcan occupancy is ~A"
+ notify-text
+ occupancy)))))
+
(defun inspect-kitchen (&key (tweet t))
- (report-move-to-sink-front-success)
+ (report-move-to-sink-front)
(if tweet
(progn
;; stove
@@ -417,7 +490,7 @@ Args:
;; sink
(tweet-string "I took a photo at 73B2 Kitchen sink." :warning-time 3
:with-image "/edgetpu_object_detector/output/image" :speak t)
- (let ((img (one-shot-subscribe "/head_camera/rgb/image_rect_color" sensor_msgs::Image)))
+ (let ((img (one-shot-subscribe "/head_camera/rgb/image_rect_color" sensor_msgs::Image :timeout 1000)))
(ros::publish "/photo_taken" img))
(take-photo "kitchen_sink.jpg")
(notify-recognition :location "kitchen sink"))
@@ -433,51 +506,57 @@ Args:
(when success-move-to-sink-front (return)))
success-move-to-sink-front))
-(defun move-to-dock-front (&key (n-trial 1) (offset #f(400 -500 0)))
+(defun move-to-dock-front (&key (n-trial 1) (offset #f(0 0 0)))
(let ((success-move-to-dock-front nil))
(dotimes (i n-trial)
(setq success-move-to-dock-front
- (send *ri* :move-to (make-coords :pos (float-vector 5077.8 6763.237 30000.0) :rpy (float-vector 0.059 0 0)) :relative-pos offset))
+ (go-to-spot *dock-spot*
+ :relative-pos offset :undock-rotate t))
(when success-move-to-dock-front (return)))
success-move-to-dock-front))
-(defun move-to-tv-front (&key (n-trial 1) (offset #f(400 -500 0)))
+(defun move-to-tv-front (&key (n-trial 1) (offset #f(0 0 0)))
(let ((success-move-to-tv-front nil))
(dotimes (i n-trial)
(setq success-move-to-tv-front
- (send *ri* :move-to (make-coords :pos (float-vector 5082.057 6800.628 30000.0) :rpy (float-vector 3.109 0 0)) :relative-pos offset))
+ (go-to-spot "/eng2/7f/room73B2-tv-front"
+ :relative-pos offset :undock-rotate t))
(when success-move-to-tv-front (return)))
success-move-to-tv-front))
-(defun move-to-tv-desk (&key (n-trial 1) (offset #f(400 -500 0)))
+(defun move-to-tv-desk (&key (n-trial 1) (offset #f(0 0 0)))
(let ((success-move-to-tv-desk nil))
(dotimes (i n-trial)
(setq success-move-to-tv-desk
- (send *ri* :move-to (make-coords :pos (float-vector 4035.759 7343.818 30000.0) :rpy (float-vector 1.753 0 0)) :relative-pos offset))
+ (go-to-spot "/eng2/7f/room73B2-tv-desk"
+ :relative-pos offset :undock-rotate t))
(when success-move-to-tv-desk (return)))
success-move-to-tv-desk))
-(defun move-to-desk-back (&key (n-trial 1) (offset #f(400 -500 0)))
+(defun move-to-desk-back (&key (n-trial 1) (offset #f(0 0 0)))
(let ((success-move-to-desk-back nil))
(dotimes (i n-trial)
(setq success-move-to-desk-back
- (send *ri* :move-to (make-coords :pos (float-vector 4324.417 6121.184 30000.0) :rpy (float-vector -0.845 0 0)) :relative-pos offset))
+ (go-to-spot "/eng2/7f/room73B2-desk-back"
+ :relative-pos offset :undock-rotate t))
(when success-move-to-desk-back (return)))
success-move-to-desk-back))
-(defun move-to-desk-front (&key (n-trial 1) (offset #f(400 -500 0)))
+(defun move-to-desk-front (&key (n-trial 1) (offset #f(0 0 0)))
(let ((success-move-to-desk-front nil))
(dotimes (i n-trial)
(setq success-move-to-desk-front
- (send *ri* :move-to (make-coords :pos (float-vector 4318.808 6108.146 30000.0) :rpy (float-vector -2.231 0 0)) :relative-pos offset))
+ (go-to-spot "/eng2/7f/room73B2-desk-front"
+ :relative-pos offset :undock-rotate t))
(when success-move-to-desk-front (return)))
success-move-to-desk-front))
-(defun move-to-kitchen-door-front (&key (n-trial 1) (offset #f(400 -500 0)))
+(defun move-to-kitchen-door-front (&key (n-trial 1) (offset #f(0 0 0)))
(let ((success-move-to-kitchen-door-front nil))
(dotimes (i n-trial)
(setq success-move-to-kitchen-door-front
- (send *ri* :move-to (make-coords :pos (float-vector 1558.69 7230.57 30000.0) :rpy (float-vector 2.296 0 0)) :relative-pos offset))
+ (go-to-spot "/eng2/7f/room73B2-kitchen-door-front"
+ :relative-pos offset :undock-rotate t))
(when success-move-to-kitchen-door-front (return)))
success-move-to-kitchen-door-front))
@@ -490,7 +569,7 @@ Args:
(progn
(tweet-string "I took a photo in front of the dock." :warning-time 3
:with-image "/edgetpu_object_detector/output/image" :speak t)
- (let ((img (one-shot-subscribe "/head_camera/rgb/image_rect_color" sensor_msgs::Image)))
+ (let ((img (one-shot-subscribe "/head_camera/rgb/image_rect_color" sensor_msgs::Image :timeout 1000)))
(ros::publish "/photo_taken" img)))))
(defun inspect-tv-front (&key (tweet t))
@@ -502,7 +581,7 @@ Args:
(progn
(tweet-string "I took a photo in front of the tv." :warning-time 3
:with-image "/edgetpu_object_detector/output/image" :speak t)
- (let ((img (one-shot-subscribe "/head_camera/rgb/image_rect_color" sensor_msgs::Image)))
+ (let ((img (one-shot-subscribe "/head_camera/rgb/image_rect_color" sensor_msgs::Image :timeout 1000)))
(ros::publish "/photo_taken" img)))))
(defun inspect-tv-desk (&key (tweet t))
@@ -514,7 +593,7 @@ Args:
(progn
(tweet-string "I took a photo in front of the tv." :warning-time 3
:with-image "/edgetpu_object_detector/output/image" :speak t)
- (let ((img (one-shot-subscribe "/head_camera/rgb/image_rect_color" sensor_msgs::Image)))
+ (let ((img (one-shot-subscribe "/head_camera/rgb/image_rect_color" sensor_msgs::Image :timeout 1000)))
(ros::publish "/photo_taken" img)))))
(defun inspect-desk-back (&key (tweet t))
@@ -526,7 +605,7 @@ Args:
(progn
(tweet-string "I took a photo of desks." :warning-time 3
:with-image "/edgetpu_object_detector/output/image" :speak t)
- (let ((img (one-shot-subscribe "/head_camera/rgb/image_rect_color" sensor_msgs::Image)))
+ (let ((img (one-shot-subscribe "/head_camera/rgb/image_rect_color" sensor_msgs::Image :timeout 1000)))
(ros::publish "/photo_taken" img)))))
(defun inspect-desk-front (&key (tweet t))
@@ -538,7 +617,7 @@ Args:
(progn
(tweet-string "I took a photo of desks." :warning-time 3
:with-image "/edgetpu_object_detector/output/image" :speak t)
- (let ((img (one-shot-subscribe "/head_camera/rgb/image_rect_color" sensor_msgs::Image)))
+ (let ((img (one-shot-subscribe "/head_camera/rgb/image_rect_color" sensor_msgs::Image :timeout 1000)))
(ros::publish "/photo_taken" img)))))
(defun inspect-kitchen-door-front (&key (tweet t))
@@ -550,7 +629,7 @@ Args:
(progn
(tweet-string "I took a photo of kitchen." :warning-time 3
:with-image "/edgetpu_object_detector/output/image" :speak t)
- (let ((img (one-shot-subscribe "/head_camera/rgb/image_rect_color" sensor_msgs::Image)))
+ (let ((img (one-shot-subscribe "/head_camera/rgb/image_rect_color" sensor_msgs::Image :timeout 1000)))
(ros::publish "/photo_taken" img)))))
(defun inspect-trashcan (&key (tweet t))
@@ -569,10 +648,11 @@ Args:
(send *ri* :wait-interpolation)
(tweet-string "I took a photo of 73B2 trash can inside." :warning-time 3
:with-image "/edgetpu_object_detector/output/image" :speak t)
- (let ((img (one-shot-subscribe "/head_camera/rgb/image_rect_color" sensor_msgs::Image)))
+ (let ((img (one-shot-subscribe "/head_camera/rgb/image_rect_color" sensor_msgs::Image :timeout 1000)))
(ros::publish "/photo_taken" img))
(take-photo "trashcan_inside.jpg")
(notify-recognition :location "trash cans inside")
+ (notify-trashcan-occupancy :location "trash can")
(send *ri* :go-pos-unsafe -0.2 0 0))
(progn
(notify-recognition :location "trash cans"))))
@@ -588,364 +668,39 @@ Args:
(send *ri* :go-pos-unsafe 0 0 -80) ;; face the front against the trash can
success-move-to-trashcan-front))
-(defun image-cb (msg)
- (setq *image* msg))
+(defun padding-byte-array (byte-array target-length)
+ (concatenate cons byte-array (make-list (- target-length (length byte-array)) :initial-element 0)))
+
+(defun write-message-on-message-board (target-addr message timeout-duration source-name)
+ "Send packet to write message on a message board.
+
+ Args:
+ target-addr: list of integer to represent mac address of target message board.
+ message: string
+ timeout-duration: ros::time to represent message timoeut
+ source-name: string
+ "
+ (let* ((packet-type-array (list 42 0))
+ (source-name-array (padding-byte-array (coerce source-name cons) 64))
+ (timeout-duration-msec (floor (* 1000 (send timeout-duration :to-sec))))
+ (timeout-duration-array
+ (mapcar
+ #'(lambda (order)
+ (/
+ (- timeout-duration-msec
+ (* (round (expt 256 (+ 1 order))) (/ timeout-duration-msec (round (expt 256 (+ 1 order))))))
+ (round (expt 256 order))))
+ '(0 1 2 3 4 5 6 7)
+ ))
+ (message-array (padding-byte-array (coerce message cons) 64))
+ (byte-data (concatenate cons packet-type-array source-name-array timeout-duration-array message-array))
+ (msg (instance smart_device_protocol::Packet :init
+ :mac_address (coerce target-addr string)
+ :data (coerce byte-data string)))
+ )
+ (ros::advertise "/smart_device_protocol/send" smart_device_protocol::Packet 1)
+ (ros::publish "/smart_device_protocol/send" msg)
+ (ros::ros-info "Write message ~A to board ~A" message target-addr)
+ )
+ )
-(defun go-to-kitchen (&key (tweet t) (n-dock-trial 1) (n-kitchen-trial 1)
- (control-switchbot :api))
- ;; go to kitchen
- (unless (boundp '*ri*)
- (require :fetch-interface "package://fetcheus/fetch-interface.l")
- (fetch-init))
- (report-start-go-to-kitchen)
- ;; Check if the lights are on in the room
- (let ((initial-light-on (get-light-on))
- (success-go-to-kitchen nil)
- (success-go-to-trashcan nil)
- (success-auto-dock nil)
- (success-battery-charging nil))
- (store-params)
- ;; turn on light
- (if initial-light-on
- (report-light-on)
- (progn
- (report-light-off)
- (room-light-on :control-switchbot control-switchbot)))
- ;; change the inflation_radius
- (inflation-loose)
- ;; go to kitchen sink
- (setq success-go-to-kitchen (move-to-sink-front :n-trial n-kitchen-trial))
- ;; report result to go to kitchen
- (if success-go-to-kitchen
- (inspect-kitchen :tweet tweet)
- (report-move-to-sink-front-failure))
- ;; go to kitchen trash can
- (setq success-go-to-trashcan (move-to-trashcan-front :n-trial n-trashcan-trial))
- ;; report result to go to trash can
- (if success-go-to-trashcan
- (inspect-trashcan :tweet tweet)
- (report-move-to-trashcan-front-failure))
- ;; go back from dock
- (report-auto-dock)
- (setq success-auto-dock (auto-dock :n-trial n-dock-trial :clear-costmap nil))
- ;; turn off light
- (if (and success-auto-dock (not initial-light-on))
- (room-light-off :control-switchbot control-switchbot))
- ;; change the inflation_radius
- (restore-params)
- (send-kitchen-mail)
- (setq success-battery-charging (equal (get-battery-charging-state) :charging))
- (and success-go-to-kitchen success-auto-dock success-battery-charging)))
-
-
-(defun go-to-kitchen-state-machine ()
- (setq *sm*
- (make-state-machine
- '((:init -> :report-start-go-to-kitchen)
- (:report-start-go-to-kitchen -> :get-light-on)
- (:get-light-on -> :report-light-on)
- (:get-light-on !-> :room-light-on)
- (:report-light-on -> :move-to-dock-front)
- (:room-light-on -> :move-to-dock-front)
-
- (:move-to-dock-front -> :inspect-dock-front)
- (:move-to-dock-front !-> :report-move-to-dock-front-failure)
- (:inspect-dock-front -> :move-to-tv-front)
- (:report-move-to-dock-front-failure -> :move-to-tv-front)
-
- (:move-to-tv-front -> :inspect-tv-front)
- (:move-to-tv-front !-> :report-move-to-tv-front-failure)
- (:inspect-tv-front -> :move-to-tv-desk)
- (:report-move-to-tv-front-failure -> :move-to-tv-desk)
-
- (:move-to-tv-desk -> :inspect-tv-desk)
- (:move-to-tv-desk !-> :report-move-to-tv-desk-failure)
- (:inspect-tv-desk -> :move-to-desk-back)
- (:report-move-to-tv-desk-failure -> :move-to-desk-back)
-
- (:move-to-desk-back -> :inspect-desk-back)
- (:move-to-desk-back !-> :report-move-to-desk-back-failure)
- (:inspect-desk-back -> :move-to-desk-front)
- (:report-move-to-desk-back-failure -> :move-to-desk-front)
-
- (:move-to-desk-front -> :inspect-desk-front)
- (:move-to-desk-front !-> :report-move-to-desk-front-failure)
- (:inspect-desk-front -> :move-to-kitchen-door-front)
- (:report-move-to-desk-front-failure -> :move-to-kitchen-door-front)
-
- (:move-to-kitchen-door-front -> :inspect-kitchen-door-front)
- (:move-to-kitchen-door-front !-> :report-move-to-kitchen-door-front-failure)
- (:inspect-kitchen-door-front -> :move-to-sink-front)
- (:report-move-to-kitchen-door-front-failure -> :move-to-sink-front)
-
- (:move-to-sink-front -> :inspect-kitchen)
- (:move-to-sink-front !-> :report-move-to-sink-front-failure)
- ;;(:inspect-kitchen -> :auto-dock)
- ;;(:report-move-to-sink-front-failure -> :auto-dock)
- (:inspect-kitchen -> :move-to-trashcan-front)
- (:move-to-trashcan-front -> :inspect-trashcan)
- (:move-to-trashcan-front !-> :report-move-to-trashcan-front-failure)
- (:inspect-trashcan -> :auto-dock)
- (:report-move-to-trashcan-front-failure -> :auto-dock)
- (:auto-dock -> :room-light-off)
- (:room-light-off -> :finish)
- (:finish -> t)
- (:finish !-> nil))
- '((:init
- '(lambda (userdata)
- (fetch-init)
- (undock)
- (send *ri* :clear-costmap)
- (store-params)
- (inflation-loose)
- (clear-app-notification)
- (ros::subscribe "/edgetpu_object_detector/output/image/compressed"
- sensor_msgs::CompressedImage #'image-cb)
- t))
- (:report-start-go-to-kitchen
- '(lambda (userdata)
- (report-start-go-to-kitchen)
- (set-alist 'description "キッチンを見に行くよ" userdata)
- (set-alist 'image "" userdata)
- t))
- (:get-light-on
- '(lambda (userdata)
- (let ((light-on (get-light-on)))
- (setf (cdr (assoc 'initial-light-on userdata)) light-on)
- (if light-on
- (set-alist 'description "電気がついていたよ" userdata)
- (set-alist 'description "電気がついていなかったよ" userdata))
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- light-on)))
- (:report-light-on
- '(lambda (userdata)
- (report-light-on)
- t))
- (:room-light-on
- '(lambda (userdata)
- (let ((control-switchbot (cdr (assoc 'control-switchbot userdata))))
- (report-light-off)
- (room-light-on :control-switchbot control-switchbot)
- (set-alist 'description "電気をつけたよ" userdata)
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- t)))
- (:move-to-dock-front
- '(lambda (userdata)
- (let* ((n-trial (cdr (assoc 'n-dock-front-trial userdata)))
- (success (move-to-dock-front :n-trial n-trial)))
- (setf (cdr (assoc 'success-go-to-dock-front userdata)) success)
- (if success
- (set-alist 'description "ドックの前に移動したよ" userdata)
- (set-alist 'description "ドックの前に移動しようとしたけど,迷子になっちゃった" userdata))
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- success)))
- (:inspect-dock-front
- '(lambda (userdata)
- (inspect-dock-front :tweet (cdr (assoc 'tweet userdata)))
- (set-alist 'description "ドックの前の様子を見たよ" userdata)
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- t))
- (:report-move-to-dock-front-failure
- '(lambda (userdata)
- (report-move-to-dock-front-failure)
- (set-alist 'description "ドックの前に移動できなかったよ" userdata)
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- t))
- (:move-to-tv-front
- '(lambda (userdata)
- (let* ((n-trial (cdr (assoc 'n-tv-front-trial userdata)))
- (success (move-to-tv-front :n-trial n-trial)))
- (setf (cdr (assoc 'success-go-to-tv-front userdata)) success)
- (if success
- (set-alist 'description "テレビの前に移動したよ" userdata)
- (set-alist 'description "テレビの前に移動しようとしたけど,迷子になっちゃった" userdata))
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- success)))
- (:inspect-tv-front
- '(lambda (userdata)
- (inspect-tv-front :tweet (cdr (assoc 'tweet userdata)))
- (set-alist 'description "テレビの前の様子を見たよ" userdata)
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- t))
- (:report-move-to-tv-front-failure
- '(lambda (userdata)
- (report-move-to-tv-front-failure)
- (set-alist 'description "テレビの前に移動できなかったよ" userdata)
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- t))
- (:move-to-tv-desk
- '(lambda (userdata)
- (let* ((n-trial (cdr (assoc 'n-tv-desk-trial userdata)))
- (success (move-to-tv-desk :n-trial n-trial)))
- (setf (cdr (assoc 'success-go-to-tv-desk userdata)) success)
- (if success
- (set-alist 'description "机の前に移動したよ" userdata)
- (set-alist 'description "机の前に移動しようとしたけど,迷子になっちゃった" userdata))
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- success)))
- (:inspect-tv-desk
- '(lambda (userdata)
- (inspect-tv-desk :tweet (cdr (assoc 'tweet userdata)))
- (set-alist 'description "机の様子を確認したよ" userdata)
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- t))
- (:report-move-to-tv-desk-failure
- '(lambda (userdata)
- (report-move-to-tv-desk-failure)
- (set-alist 'description "机の前に移動できなかったよ" userdata)
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- t))
- (:move-to-desk-back
- '(lambda (userdata)
- (let* ((n-trial (cdr (assoc 'n-desk-back-trial userdata)))
- (success (move-to-desk-back :n-trial n-trial)))
- (setf (cdr (assoc 'success-go-to-desk-back userdata)) success)
- (if success
- (set-alist 'description "部屋の後ろに移動したよ" userdata)
- (set-alist 'description "部屋の後ろに移動しようとしたけど,迷子になっちゃった" userdata))
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- success)))
- (:inspect-desk-back
- '(lambda (userdata)
- (inspect-desk-back :tweet (cdr (assoc 'tweet userdata)))
- (set-alist 'description "部屋の後ろを確認したよ" userdata)
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- t))
- (:report-move-to-desk-back-failure
- '(lambda (userdata)
- (report-move-to-desk-back-failure)
- (set-alist 'description "部屋の後ろに移動できなかったよ" userdata)
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- t))
- (:move-to-desk-front
- '(lambda (userdata)
- (let* ((n-trial (cdr (assoc 'n-desk-front-trial userdata)))
- (success (move-to-desk-front :n-trial n-trial)))
- (setf (cdr (assoc 'success-go-to-desk-front userdata)) success)
- (if success
- (set-alist 'description "部屋の前に移動したよ" userdata)
- (set-alist 'description "部屋の前に移動しようとしたけど,迷子になっちゃった" userdata))
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- success)))
- (:inspect-desk-front
- '(lambda (userdata)
- (inspect-desk-front :tweet (cdr (assoc 'tweet userdata)))
- (set-alist 'description "部屋の前を確認したよ" userdata)
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- t))
- (:report-move-to-desk-front-failure
- '(lambda (userdata)
- (report-move-to-desk-front-failure)
- (set-alist 'description "部屋の前に移動できなかったよ" userdata)
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- t))
- (:move-to-kitchen-door-front
- '(lambda (userdata)
- (let* ((n-trial (cdr (assoc 'n-kitchen-door-front-trial userdata)))
- (success (move-to-kitchen-door-front :n-trial n-trial)))
- (setf (cdr (assoc 'success-go-to-tv-desk userdata)) success)
- (if success
- (set-alist 'description "ドアの前に移動したよ" userdata)
- (set-alist 'description "ドアの前に移動しようとしたけど,迷子になっちゃった" userdata))
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- success)))
- (:inspect-kitchen-door-front
- '(lambda (userdata)
- (inspect-kitchen-door-front :tweet (cdr (assoc 'tweet userdata)))
- (set-alist 'description "ドアの前からキッチンの様子を見たよ" userdata)
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- t))
- (:report-move-to-kitchen-door-front-failure
- '(lambda (userdata)
- (report-move-to-kitchen-door-front-failure)
- (set-alist 'description "ドアの前に移動できなかったよ" userdata)
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- t))
- (:move-to-sink-front
- '(lambda (userdata)
- (let* ((n-trial (cdr (assoc 'n-kitchen-trial userdata)))
- (success (move-to-sink-front :n-trial n-trial)))
- (setf (cdr (assoc 'success-go-to-kitchen userdata)) success)
- (if success
- (set-alist 'description "キッチンに移動したよ" userdata)
- (set-alist 'description "キッチンに移動しようとしたけど,迷子になっちゃった" userdata))
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- success)))
- (:inspect-kitchen
- '(lambda (userdata)
- (let* ((label-names (notify-recognition :location "kitchen"))
- (notify-text (if label-names (format nil "~Aがあったよ" label-names) "")))
- (inspect-kitchen :tweet (cdr (assoc 'tweet userdata)))
- (set-alist 'description (format nil "キッチンの様子を見たよ。~A" notify-text) userdata))
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- t))
- (:report-move-to-sink-front-failure
- '(lambda (userdata)
- (report-move-to-sink-front-failure)
- (set-alist 'description "キッチンに行けなかったよ" userdata)
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- t))
- (:move-to-trashcan-front
- '(lambda (userdata)
- (let* ((n-trial (cdr (assoc 'n-trashcan-trial userdata)))
- (success (move-to-trashcan-front :n-trial n-trial)))
- (setf (cdr (assoc 'success-go-to-trashcan userdata)) success)
- (if success
- (set-alist 'description "ゴミ箱の前に移動したよ" userdata)
- (set-alist 'description "ゴミ箱の前に移動しようとしたけど,迷子になっちゃった" userdata))
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- success)))
- (:inspect-trashcan
- '(lambda (userdata)
- (inspect-trashcan :tweet (cdr (assoc 'tweet userdata)))
- (set-alist 'description "ゴミ箱の様子を確認したよ" userdata)
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- t))
- (:report-move-to-trashcan-front-failure
- '(lambda (userdata)
- (report-move-to-trashcan-front-failure)
- (set-alist 'description "ゴミ箱の前に行けなかったよ" userdata)
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- t))
- (:auto-dock
- '(lambda (userdata)
- (report-auto-dock)
- (let* ((n-trial (cdr (assoc 'n-dock-trial userdata)))
- (success (auto-dock :n-trial n-trial :clear-costmap nil)))
- (setf (cdr (assoc 'success-auto-dock userdata)) success)
- (if success
- (set-alist 'description "帰ってきたよ" userdata)
- (set-alist 'description "帰ってこようとしたけど,迷子になっちゃった" userdata))
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- success)))
- (:auto-dock-failure
- '(lambda (userdata)
- (report-auto-dock-failure)
- (set-alist 'description "帰ってこられなかったよ" userdata)
- (set-alist 'image (remove #\newline (base64encode (send *image* :serialize))) userdata)
- t))
- (:room-light-off
- '(lambda (userdata)
- (let ((success-auto-dock (cdr (assoc 'success-auto-dock userdata)))
- (initial-light-on (cdr (assoc 'initial-light-on userdata)))
- (control-switchbot (cdr (assoc 'control-switchbot userdata))))
- (if (and success-auto-dock (not initial-light-on))
- (progn
- (room-light-off :control-switchbot control-switchbot)
- (set-alist 'description "電気を消したよ" userdata)
- (set-alist 'image "" userdata))))
- t))
- (:finish
- '(lambda (userdata)
- (let ((success-battery-charging
- (progn (wait-until-is-charging)
- (equal (get-battery-charging-state) :charging)))
- (success-auto-dock (cdr (assoc 'success-auto-dock userdata)))
- (success-go-to-kitchen
- (cdr (assoc 'success-go-to-kitchen userdata))))
- (restore-params)
- (set-alist 'description "キッチンデモを終えるよ" userdata)
- (set-alist 'image "" userdata)
- (and success-go-to-kitchen success-auto-dock success-battery-charging)))))
- '(:init)
- '(t nil))))
diff --git a/jsk_fetch_robot/jsk_fetch_startup/launch/devices/realsense_nodelet.launch.xml b/jsk_fetch_robot/jsk_fetch_startup/launch/devices/realsense_nodelet.launch.xml
index a72dd3f2d1..c5993ed682 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/launch/devices/realsense_nodelet.launch.xml
+++ b/jsk_fetch_robot/jsk_fetch_startup/launch/devices/realsense_nodelet.launch.xml
@@ -3,6 +3,8 @@
This launch file is copied from realsense2_camera in realsense_ros https://github.com/IntelRealSense/realsense-ros and then modified
And it is originally distributed under Apache-2.0 License
-->
+
+
@@ -10,6 +12,7 @@
+
@@ -101,11 +104,12 @@
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch.launch b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch.launch
index 0bccd16208..f06beff91f 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch.launch
+++ b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch.launch
@@ -2,19 +2,22 @@
-
-
-
-
-
+
+
+
+
+
+
-
+
+
+
@@ -31,7 +34,6 @@
-
@@ -39,6 +41,8 @@
+
+
@@ -107,7 +111,12 @@
false, false, false]
odom0_nodelay: true
odom0_differential: true
+ permit_corrected_publication: false
+
@@ -137,7 +146,7 @@
command="$(find xacro)/xacro $(find jsk_fetch_startup)/robots/jsk_fetch.urdf.xacro
ros_distro:=$(env ROS_DISTRO) use_fetch_description:=$(arg use_fetch_description)
base_camera_mount:=$(arg use_base_camera_mount) head_box:=$(arg use_head_box)
- head_l515:=$(arg use_head_l515)" />
+ head_l515:=$(arg use_head_l515) insta360_stand:=$(arg insta360_stand)" />
diff --git a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_auto_dock.xml b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_auto_dock.xml
new file mode 100644
index 0000000000..be7b25f86c
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_auto_dock.xml
@@ -0,0 +1,14 @@
+
+
+
+
+ duration_timeout_undock: 10.0
+ duration_timeout_preorientation: 20.0
+
+
+
+
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_bringup.launch b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_bringup.launch
index 996ee01797..539974b2b4 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_bringup.launch
+++ b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_bringup.launch
@@ -1,17 +1,69 @@
-
+
-
+
+
+
+
+
+
+
+
-
-
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
-
-
+
+
@@ -20,25 +72,27 @@
+ respawn="true" output="screen" if="$(arg launch_battery_warning)">
duration: 180
- charge_level_threshold: 80.0
+ charge_level_threshold: 65.0
shutdown_level_threshold: 60.0
charge_level_step: 10.0
volume: 1.0
-
+
lang: japanese
volume: 0.5
-
+
-
+
@@ -51,21 +105,30 @@
-
-
-
-
+
+
+
+
+
+
+ default_voice: $(arg default_english_speaker)
+ plugin: sound_play/flite_plugin
+
+
+
-
-
-
-
-
-
-
-
-
+
+
+
+
+
+
+
+
+
+
+
@@ -73,14 +136,17 @@
-
+
+
+ name="diag_agg" args="CPP" output="screen"
+ clear_params="true" >
@@ -95,80 +161,138 @@
-
+
-
+
-
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
-
+
-
+
+
-
+
-
+
interface_name: wlan0
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
- tts_action_names:
- - sound_play
- - robotsound_jp
-
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ tts_action_names:
+ - sound_play
+ - robotsound_jp
+
+
+
+
+
+
+
+
+ default_select: speech_to_text_google
+ patient: 6
+
+
-
-
-
-
-
-
- default_select: speech_to_text_google
- patient: 6
-
-
@@ -178,14 +302,15 @@
-
+
vital_rate: 0.1
-
+
@@ -227,17 +352,22 @@
+ output="screen" if="$(arg launch_build_map)" >
-
+
+
+ luminance_threshold: 70
+
-
+
map_frame: /map
base_frame: /base_link
@@ -245,30 +375,97 @@
-
+
-
-
-
- email_info: /var/lib/robot/email_topic.yaml
-
-
+
+
+
+
+ email_info: /var/lib/robot/email_topic.yaml
+
+
+
+
+
+
+
+
+ use_mail: true
+ use_twitter: $(arg launch_tweet)
+ use_google_chat: $(arg launch_google_chat)
+ google_chat_space: spaces/AAAARE9CrfA
+
+
+
-
-
+
+
- email_info: /var/lib/robot/email_topic.yaml
+ duration: 0.5
+
+
+
+
+
-
-
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ run_stop_topic: robot_state
+ run_stop_condition: "m.runstopped is True"
+ seconds_to_start_speaking: 60
+ speak_interval: 600
+ language: $(arg default_warning_speaker)
+ ignore_time_after_runstop_is_enabled: 5.0
+ ignore_time_after_runstop_is_disabled: 5.0
+
+
+
+
+
+
+
+
-
+
duration: 60
diff --git a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_coral.launch b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_coral.launch
new file mode 100644
index 0000000000..237ef48534
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_coral.launch
@@ -0,0 +1,56 @@
+
+
+
+
+
+
+
+
+
+
+
+ edgetpu_human_node_manager:
+ nodes:
+ - name: edgetpu_human_pose_estimator
+ type: human_pose_estimator
+ - name: edgetpu_panorama_human_pose_estimator
+ type: panorama_human_pose_estimator
+ default: edgetpu_human_pose_estimator
+ edgetpu_human_pose_estimator:
+ input_topic: $(arg input_image)
+ image_transport: raw
+ device_id: 0
+ edgetpu_panorama_human_pose_estimator:
+ input_topic: $(arg input_panorama_image)
+ image_transport: raw
+ device_id: 0
+
+
+
+
+
+
+ edgetpu_object_node_manager:
+ nodes:
+ - name: edgetpu_object_detector
+ type: object_detector
+ - name: edgetpu_panorama_object_detector
+ type: panorama_object_detector
+ default: edgetpu_object_detector
+ edgetpu_object_detector:
+ input_topic: $(arg input_image)
+ image_transport: raw
+ device_id: 1
+ model_file: /etc/ros/jsk_data/coral_usb/mobilenet_v2_ssd_73b2_kitchen_finetuning_20200528.tflite
+ label_file: /etc/ros/jsk_data/coral_usb/73b2_kitchen_labels.txt
+ edgetpu_panorama_object_detector:
+ input_topic: $(arg input_panorama_image)
+ image_transport: raw
+ device_id: 1
+ model_file: /etc/ros/jsk_data/coral_usb/mobilenet_v2_ssd_73b2_kitchen_finetuning_20200528.tflite
+ label_file: /etc/ros/jsk_data/coral_usb/73b2_kitchen_labels.txt
+
+
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_dialogflow_task_executive.launch b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_dialogflow_task_executive.launch
new file mode 100644
index 0000000000..a236629a55
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_dialogflow_task_executive.launch
@@ -0,0 +1,32 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_gazebo_bringup.launch b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_gazebo_bringup.launch
index 62ec7167f5..0d48cab9e7 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_gazebo_bringup.launch
+++ b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_gazebo_bringup.launch
@@ -4,6 +4,9 @@
+
+
+
@@ -31,13 +34,51 @@
+
+
+
+
+
+
+
+
+
+
-
-
-
-
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_insta360_indigo.launch b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_insta360_indigo.launch
index 5cd5374aa4..2835f972fd 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_insta360_indigo.launch
+++ b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_insta360_indigo.launch
@@ -1,6 +1,7 @@
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_insta360_melodic.launch b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_insta360_melodic.launch
index c94523f778..9958ed71f2 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_insta360_melodic.launch
+++ b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_insta360_melodic.launch
@@ -2,14 +2,18 @@
+
-
-
+
+
+
+
+
@@ -21,8 +25,8 @@
- scale_width: 0.25
- scale_height: 0.25
+ scale_width: 0.5
+ scale_height: 0.5
diff --git a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_lifelog.xml b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_lifelog.xml
index f685bdd841..4c61e45da8 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_lifelog.xml
+++ b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_lifelog.xml
@@ -2,6 +2,8 @@
+
+
@@ -11,23 +13,28 @@
+
+
+
+
-
-
+
+
+
@@ -73,4 +80,10 @@
- sound_play/SoundRequestActionGoal
- sound_play/SoundRequestActionResult
+
+
+
+
+
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_realsense_bringup.launch b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_realsense_bringup.launch
index afbedb15e5..1e0ab40556 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_realsense_bringup.launch
+++ b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_realsense_bringup.launch
@@ -1,12 +1,34 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
@@ -56,13 +78,12 @@
-
-
+
@@ -73,16 +94,17 @@
-
-
+
+
+
@@ -90,21 +112,90 @@
-
-
-
-
-
+
+
+
+
- /l515_head/motion_module/global_time_enabled: true
- /l515_head/l500_depth_sensor/global_time_enabled: true
- /l515_head/rgb_camera/global_time_enabled: true
+ /l515_head/motion_module/global_time_enabled: true
+ /l515_head/l500_depth_sensor/global_time_enabled: true
+ /l515_head/rgb_camera/global_time_enabled: true
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ step_x: 4
+ step_y: 4
+
+
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_sensors.xml b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_sensors.xml
index 43d79040b6..7b88454973 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_sensors.xml
+++ b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_sensors.xml
@@ -16,6 +16,15 @@
+
+
+
+
+ warning_hz: 5
+
+
+
+
+
+
+
+
+
+
+
+ warning_hz: 5
+
+
-
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_tweet.launch b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_tweet.launch
index d8faf71fb8..198a504b64 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_tweet.launch
+++ b/jsk_fetch_robot/jsk_fetch_startup/launch/fetch_tweet.launch
@@ -1,11 +1,10 @@
-
-
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/launch/navigation/fetch1075/fetch_move_base_common_params.yaml b/jsk_fetch_robot/jsk_fetch_startup/launch/navigation/fetch1075/fetch_move_base_common_params.yaml
index b7eabb9a39..d34d1b345a 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/launch/navigation/fetch1075/fetch_move_base_common_params.yaml
+++ b/jsk_fetch_robot/jsk_fetch_startup/launch/navigation/fetch1075/fetch_move_base_common_params.yaml
@@ -1,10 +1,10 @@
move_base:
recovery_behavior_enabled: true
recovery_behaviors:
- - name: "conservative_reset"
- type: "clear_costmap_recovery/ClearCostmapRecovery"
- - name: "rotate_recovery0"
- type: "rotate_recovery/RotateRecovery"
+ - name: "complex_conservative_recovery"
+ type: "complex_recovery/SequentialComplexRecovery"
+ - name: "complex_rotate0"
+ type: "complex_recovery/SequentialComplexRecovery"
- name: "speak_and_wait0"
type: "speak_and_wait_recovery/SpeakAndWaitRecovery"
- name: "aggressive_reset"
@@ -19,16 +19,64 @@ move_base:
type: "rotate_recovery/RotateRecovery"
- name: "move_slow_and_clear"
type: "move_slow_and_clear/MoveSlowAndClear"
+ complex_conservative_recovery:
+ recovery_behaviors:
+ - name: "update_inflation_layer_local0"
+ type: "update_move_base_parameter_recovery/UpdateInflationLayerParameterRecovery"
+ - name: "update_costmap_local0"
+ type: "update_move_base_parameter_recovery/UpdateCostmapParameterRecovery"
+ - name: "update_inflation_layer_global0"
+ type: "update_move_base_parameter_recovery/UpdateInflationLayerParameterRecovery"
+ - name: "update_costmap_global0"
+ type: "update_move_base_parameter_recovery/UpdateCostmapParameterRecovery"
+ - name: "conservative_reset"
+ type: "clear_costmap_recovery/ClearCostmapRecovery"
+ update_inflation_layer_local0:
+ parameter_name: "/move_base/local_costmap/inflater"
+ inflation_radius: 0.1
+ duration_dealline: 15.0
+ update_costmap_local0:
+ parameter_name: "/move_base/local_costmap"
+ footprint_padding: 0.1
+ duration_dealline: 15.0
+ update_inflation_layer_global0:
+ parameter_name: "/move_base/global_costmap/inflater"
+ inflation_radius: 0.1
+ duration_dealline: 15.0
+ update_costmap_global0:
+ parameter_name: "/move_base/global_costmap"
+ footprint_padding: 0.1
+ duration_dealline: 15.0
+ conservative_reset:
+ reset_distance: 3.0
+ force_updating: true
+ complex_rotate0:
+ recovery_behaviors:
+ - name: "speak_and_wait"
+ type: "speak_and_wait_recovery/SpeakAndWaitRecovery"
+ - name: "rotate_recovery"
+ type: "rotate_recovery/RotateRecovery"
+ speak_and_wait:
+ speak_text: "リカバリのためにまわります。"
+ duration_wait: 0.0
+ duration_timeout: 1.0
+ sound_action: /robotsound_jp
speak_and_wait0:
- speak_text: "とおれません、みちをあけてください"
+ speak_text: "とおれません、ちょっとみちをあけてください"
duration_wait: 5.0
duration_timeout: 1.0
sound_action: /robotsound_jp
+ aggressive_reset:
+ reset_distance: 1.0
+ force_updating: true
speak_and_wait1:
speak_text: "とおれません、みちをあけてください"
duration_wait: 5.0
duration_timeout: 1.0
sound_action: /robotsound_jp
+ all_reset:
+ reset_distance: 0.0
+ force_updating: true
move_slow_and_clear:
planner_namespace: TrajectoryPlannerROS
max_trans_param_name: max_vel_x
diff --git a/jsk_fetch_robot/jsk_fetch_startup/launch/navigation/fetch15/fetch_move_base_common_params.yaml b/jsk_fetch_robot/jsk_fetch_startup/launch/navigation/fetch15/fetch_move_base_common_params.yaml
index 9da82ce6e2..0d3130cdcb 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/launch/navigation/fetch15/fetch_move_base_common_params.yaml
+++ b/jsk_fetch_robot/jsk_fetch_startup/launch/navigation/fetch15/fetch_move_base_common_params.yaml
@@ -1,112 +1,4 @@
move_base:
- controller_frequency: 20.0
- global_costmap:
- inflater:
- inflation_radius: 1.0 # 0.7
- cost_scaling_factor: 10.0 # 10.0
- obstacles:
- min_obstacle_height: 0.05
- footprint_padding: 0.05
- publish_frequency: 1.0
- local_costmap:
- inflater:
- inflation_radius: 1.0 # 0.7
- cost_scaling_factor: 10.0 # 25.0 default 10, increasing factor decrease the cost value
- obstacles:
- min_obstacle_height: 0.05
- # default 5 (http://wiki.ros.org/navigation/Tutorials/Navigation%20Tuning%20Guide)
- footprint_padding: 0.05
- update_frequency: 5.0
- base_global_planner: global_planner/GlobalPlanner
- base_local_planner: teb_local_planner/TebLocalPlannerROS
- # base_local_planner: base_local_planner/TrajectoryPlannerROS
- GlobalPlanner:
- allow_unknown: true
- neural_cost: 50
- lethal_cost: 253
- cost_factor: 0.8
- default_tolerance: 0.0
- orientation_mode: 1
- visualize_potential: false
- publish_potential: false
- TrajectoryPlannerROS:
- yaw_goal_tolerance: 0.1
- xy_goal_tolerance: 0.17
- max_vel_x: 0.5
- min_vel_x: 0.1
- min_in_place_vel_theta: 0.5
- escape_vel: 0.0
- sim_time: 1.5
- sim_granularity: 0.025
- angular_sim_granularity: 0.025
- vx_samples: 10
- vth_samples: 40
- meter_scoring: true
- pdist_scale: 4.0
- gdist_scale: 2.5
- occdist_scale: 0.00625
- dwa: true
- TebLocalPlannerROS:
- odom_topic: /odom_combined
- map_frame: /odom
- # Trajectory
- teb_autosize: True
- dt_ref: 0.3
- dt_hysteresis: 0.1
- global_plan_overwrite_orientation: True
- max_global_plan_lookahead_dist: 3.0
- feasibility_check_no_poses: 5
- # Robot
- max_vel_x: 0.5
- max_vel_x_backwards: 0.3
- max_vel_theta: 1.0
- acc_lim_x: 1.0
- acc_lim_theta: 1.0
- min_turning_radius: 0.2
- footprint_model:
- type: "circular"
- radius: 0.3
- # GoalTolerance
- xy_goal_tolerance: 0.2
- yaw_goal_tolerance: 0.1
- free_goal_vel: False
- # Obstacles
- min_obstacle_dist: 0.1
- include_costmap_obstacles: True
- costmap_obstacles_behind_robot_dist: 1.0
- obstacle_poses_afected: 30
- costmap_converter_plugin: ""
- costmap_converter_spin_thread: True
- costmap_converter_rate: 5
- # Optimization
- no_inner_iterations: 5
- no_outer_iterations: 4
- optimization_activate: True
- optimization_verbose: False
- penalty_epsilon: 0.1
- weight_max_vel_x: 2
- weight_max_vel_theta: 1
- weight_acc_lim_x: 1
- weight_acc_lim_theta: 1
- weight_kinematics_nh: 1000
- weight_kinematics_forward_drive: 1000
- weight_kinematics_turning_radius: 100
- weight_optimaltime: 1
- weight_obstacle: 50
- weight_dynamic_obstacle: 10 # not in use yet
- alternative_time_cost: False # not in use yet
- # Homotopy Class Planner
- enable_homotopy_class_planning: True
- enable_multithreading: True
- simple_exploration: False
- max_number_classes: 4
- roadmap_graph_no_samples: 15
- roadmap_graph_area_width: 5
- h_signature_prescaler: 0.5
- h_signature_threshold: 0.1
- obstacle_keypoint_offset: 0.1
- obstacle_heading_threshold: 0.45
- visualize_hc_graph: False
recovery_behavior_enabled: true
recovery_behaviors:
- name: "conservative_reset"
@@ -157,7 +49,7 @@ move_base:
limited_trans_speed: 0.3
limited_rot_speed: 0.8
limited_distance: 0.3
- planner_namespace: TebLocalPlannerROS
+ planner_namespace: TrajectoryPlannerROS
max_trans_param_name: max_vel_x
max_rot_param_name: max_vel_theta
max_planning_retries: 2
diff --git a/jsk_fetch_robot/jsk_fetch_startup/launch/rosbag_play.launch b/jsk_fetch_robot/jsk_fetch_startup/launch/rosbag_play.launch
index 1fdab69f5f..20abc5d53a 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/launch/rosbag_play.launch
+++ b/jsk_fetch_robot/jsk_fetch_startup/launch/rosbag_play.launch
@@ -12,6 +12,8 @@
+
+
@@ -104,8 +106,8 @@
+ args="$(arg rosbag) $(arg loop_flag) --clock --start $(arg start_time) $(arg duration) -r $(arg rate)" output="screen" />
+ args="-d $(arg rviz_config)" />
diff --git a/jsk_fetch_robot/jsk_fetch_startup/launch/rosbag_record.launch b/jsk_fetch_robot/jsk_fetch_startup/launch/rosbag_record.launch
index 43b5a923ce..12dd846fd3 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/launch/rosbag_record.launch
+++ b/jsk_fetch_robot/jsk_fetch_startup/launch/rosbag_record.launch
@@ -35,6 +35,9 @@
/head_camera/depth_registered/throttled/camera_info
/head_camera/rgb/throttled/image_rect_color/compressed
/head_camera/depth_registered/throttled/image_rect/compressedDepth
+ /server_name/smach/container_init
+ /server_name/smach/container_status
+ /server_name/smach/container_structure
/audio
$(arg other_topics)
$(arg regex_flag)
diff --git a/jsk_fetch_robot/jsk_fetch_startup/launch/trashbin_occupancy_detector.launch b/jsk_fetch_robot/jsk_fetch_startup/launch/trashbin_occupancy_detector.launch
new file mode 100644
index 0000000000..76030da7cd
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/launch/trashbin_occupancy_detector.launch
@@ -0,0 +1,176 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ use_indices: false
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ tolerance: 0.02
+ min_size: 20
+ vital_rate: 0.1
+
+
+
+
+
+
+
+ align_boxes: true
+ align_boxes_with_plane: false
+ target_frame_id: base_link
+ use_pca: true
+ force_to_flip_z_axis: false
+ vital_rate: 0.1
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ trashbin_l: 0.3
+ trashbin_w: 0.2
+ trashbin_h: 0.49
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/launch/view_model.launch b/jsk_fetch_robot/jsk_fetch_startup/launch/view_model.launch
new file mode 100644
index 0000000000..4f8ef6e3f9
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/launch/view_model.launch
@@ -0,0 +1,17 @@
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/package.xml b/jsk_fetch_robot/jsk_fetch_startup/package.xml
index a89d0c4dea..f83da9e637 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/package.xml
+++ b/jsk_fetch_robot/jsk_fetch_startup/package.xml
@@ -12,7 +12,9 @@
catkin
fetch_teleop
+ dynamic_reconfigure
+ dynamic_reconfigure
image_proc
jsk_fetch_accessories
jsk_fetch_diagnosis
@@ -29,12 +31,15 @@
pr2_computer_monitor
robot_pose_publisher
rviz
+ switchbot_ros
tf
touchegg
sound_play
switchbot_ros
tf2_ros
voice_text
+ tf2
+ tf2_geometry_msgs
amcl
@@ -48,6 +53,7 @@
librealsense2
realsense2_camera
realsense2_description
+ update_move_base_parameter_recovery
app_manager
@@ -64,9 +70,16 @@
julius_ros
respeaker_ros
+
+ dialogflow_task_executive
+ google_chat_ros
+
robot_pose_publisher
+
+ jsk_pcl_ros
+
rostest
diff --git a/jsk_fetch_robot/jsk_fetch_startup/robots/finger_tip.urdf.xacro b/jsk_fetch_robot/jsk_fetch_startup/robots/finger_tip.urdf.xacro
new file mode 100644
index 0000000000..0e1002ac0e
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/robots/finger_tip.urdf.xacro
@@ -0,0 +1,72 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/robots/head_l515.urdf.xacro b/jsk_fetch_robot/jsk_fetch_startup/robots/head_l515.urdf.xacro
index 8361f9dc20..24885a8324 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/robots/head_l515.urdf.xacro
+++ b/jsk_fetch_robot/jsk_fetch_startup/robots/head_l515.urdf.xacro
@@ -22,16 +22,22 @@
-
+
+
+
+
+
+
+
-
+
-
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/robots/insta360_stand.urdf.xacro b/jsk_fetch_robot/jsk_fetch_startup/robots/insta360_stand.urdf.xacro
new file mode 100644
index 0000000000..690742cfa6
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/robots/insta360_stand.urdf.xacro
@@ -0,0 +1,15 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/robots/jsk_fetch.urdf.xacro b/jsk_fetch_robot/jsk_fetch_startup/robots/jsk_fetch.urdf.xacro
index 460086a8da..6cbb4f2840 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/robots/jsk_fetch.urdf.xacro
+++ b/jsk_fetch_robot/jsk_fetch_startup/robots/jsk_fetch.urdf.xacro
@@ -1,10 +1,13 @@
+
-
+
-
+
+
+
@@ -21,4 +24,13 @@
+
+
+
+
+
+
+
+
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/robots/side_hook.urdf.xacro b/jsk_fetch_robot/jsk_fetch_startup/robots/side_hook.urdf.xacro
new file mode 100644
index 0000000000..f373bc6110
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/robots/side_hook.urdf.xacro
@@ -0,0 +1,74 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_fetch_robot/jsk_fetch_startup/scripts/certbot_renewhook.sh b/jsk_fetch_robot/jsk_fetch_startup/scripts/certbot_renewhook.sh
new file mode 100755
index 0000000000..d37fe27421
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/scripts/certbot_renewhook.sh
@@ -0,0 +1,7 @@
+#!/bin/sh
+
+SITE=dialogflow.$(hostname).jsk.imi.i.u-tokyo.ac.jp
+
+cd /etc/letsencrypt/live/$SITE
+cat fullchain.pem privkey.pem > /etc/haproxy/certs/$SITE.pem
+systemctl restart haproxy
diff --git a/jsk_fetch_robot/jsk_fetch_startup/scripts/dstat.bash b/jsk_fetch_robot/jsk_fetch_startup/scripts/dstat.bash
new file mode 100755
index 0000000000..440237145e
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/scripts/dstat.bash
@@ -0,0 +1,14 @@
+#!/usr/bin/env bash
+
+# Keep only the last 1000 lines of csv log before executing dstat
+CSV_FILE=/home/fetch/Documents/jsk_dstat.csv
+
+if [ -e $CSV_FILE ]; then
+ cp -f $CSV_FILE $CSV_FILE.bk
+ tail -n 1000 $CSV_FILE.bk > $CSV_FILE
+ rm -f $CSV_FILE.bk
+else
+ touch $CSV_FILE
+fi
+
+dstat -tl --cpufreq -c -C all --top-cpu-adv -dgimnprsTy --output $CSV_FILE
diff --git a/jsk_fetch_robot/jsk_fetch_startup/scripts/fetchctl.sh b/jsk_fetch_robot/jsk_fetch_startup/scripts/fetchctl.sh
new file mode 100755
index 0000000000..ec5d8f0b84
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/scripts/fetchctl.sh
@@ -0,0 +1,63 @@
+#!/bin/bash
+
+function usage() {
+ echo "Usage: $0 "
+ exit 1
+}
+
+function start_jobs() {
+ sudo supervisorctl start roscore
+ sudo supervisorctl start robot
+ sudo supervisorctl start jsk-shutdown
+ sudo supervisorctl start jsk-rfcomm-bind
+ sudo supervisorctl start jsk-object-detector
+ sudo supervisorctl start jsk-network-monitor
+ sudo supervisorctl start jsk-log-wifi
+ sudo supervisorctl start jsk-human-pose-estimator
+ sudo supervisorctl start jsk-gdrive
+ sudo supervisorctl start jsk-fetch-startup
+ sudo supervisorctl start jsk-dstat
+ sudo supervisorctl start jsk-dialog
+ sudo supervisorctl start jsk-app-scheduler
+}
+
+function restart_jobs() {
+ sudo supervisorctl restart roscore
+ sudo supervisorctl restart robot
+ sudo supervisorctl restart jsk-shutdown
+ sudo supervisorctl restart jsk-rfcomm-bind
+ sudo supervisorctl restart jsk-object-detector
+ sudo supervisorctl restart jsk-network-monitor
+ sudo supervisorctl restart jsk-log-wifi
+ sudo supervisorctl restart jsk-human-pose-estimator
+ sudo supervisorctl restart jsk-gdrive
+ sudo supervisorctl restart jsk-fetch-startup
+ sudo supervisorctl restart jsk-dstat
+ sudo supervisorctl restart jsk-dialog
+ sudo supervisorctl restart jsk-app-scheduler
+}
+
+function stop_jobs() {
+ sudo supervisorctl stop roscore
+ sudo supervisorctl stop robot
+ sudo supervisorctl stop jsk-shutdown
+ sudo supervisorctl stop jsk-rfcomm-bind
+ sudo supervisorctl stop jsk-object-detector
+ sudo supervisorctl stop jsk-network-monitor
+ sudo supervisorctl stop jsk-log-wifi
+ sudo supervisorctl stop jsk-human-pose-estimator
+ sudo supervisorctl stop jsk-gdrive
+ sudo supervisorctl stop jsk-fetch-startup
+ sudo supervisorctl stop jsk-dstat
+ sudo supervisorctl stop jsk-dialog
+ sudo supervisorctl stop jsk-app-scheduler
+}
+
+command=$1
+
+case "$command" in
+ start) start_jobs;;
+ restart) restart_jobs;;
+ stop) stop_jobs;;
+ *) usage;;
+esac
diff --git a/jsk_fetch_robot/jsk_fetch_startup/scripts/log-wifi-link.sh b/jsk_fetch_robot/jsk_fetch_startup/scripts/log-wifi-link.sh
index 9de64ee353..3afeeb5c6d 100755
--- a/jsk_fetch_robot/jsk_fetch_startup/scripts/log-wifi-link.sh
+++ b/jsk_fetch_robot/jsk_fetch_startup/scripts/log-wifi-link.sh
@@ -1,25 +1,51 @@
#!/bin/bash
IFACE=wlan0
-OUTPATH=/var/log/wifi.log
INTERVAL=10
+PING_COUNT=3
+PING_TIMEOUT=1
+PING_TARGET="www.google.com"
wifi_status(){
local ssid=$(iw $IFACE link | grep SSID | cut -d: -f2)
local freq=$(iw $IFACE link | grep freq | cut -d':' -f2)
- local signal=$(cat /proc/net/wireless | grep wlan0 | awk '{print $3}')
- local level=$(cat /proc/net/wireless | grep wlan0 | awk '{print $4}')
- local noise=$(cat /proc/net/wireless | grep wlan0 | awk '{print $5}')
+ local signal=$(cat /proc/net/wireless | grep $IFACE | awk '{print $3}')
+ local level=$(cat /proc/net/wireless | grep $IFACE | awk '{print $4}')
+ local noise=$(cat /proc/net/wireless | grep $IFACE | awk '{print $5}')
local bitrate=$(iw $IFACE link | grep bitrate | cut -d':' -f2)
- echo "$(date -Iseconds),$ssid,$freq,$signal,$level,$noise,$bitrate"
+ local ping_result_raw=$(ping -I $IFACE $PING_TARGET -c $PING_COUNT -W $PING_TIMEOUT 2> /dev/null | tail -n 1)
+ if [ -z "$ping_result_raw" ]; then
+ # minus ping indicates ping fails
+ local ping_result_duration=-1000
+ else
+ local ping_result_duration=$(echo $ping_result_raw | cut -d " " -f 4 | cut -d "/" -f 2)
+ fi
+ echo "$(date -Iseconds),$ssid,$freq,$signal,$level,$noise,$bitrate, $ping_result_duration"
}
-OUTDIR=$(dirname $OUTPATH)
-if [ ! -d $OUTDIR ]; then
- mkdir -p $OUTDIR
-fi
+print_help(){
+ echo "Usage: log-wifi-link.sh [-h]"
+ echo " [-i INTERVAL (default: 10)]"
+ echo " [-I IFACE (default: wlan0)]"
+ echo " [-c PING_COUNT (default: 3)]"
+ echo " [-W PING_TIMEOUT (default: 1)]"
+ echo " [-t PING_TARGET (default: \"www.google.com\")]"
+ exit 1
+}
+
+while getopts hi:I:c:W:t: o
+do
+ case "$o" in
+ i) INTERVAL=$OPTARG;;
+ I) IFACE="$OPTARG";;
+ c) PING_COUNT=$OPTARG;;
+ W) PING_TIMEOUT=$OPTARG;;
+ t) PING_TARGET="$OPTARG";;
+ h) print_help;;
+ esac
+done
while true; do
- wifi_status >> $OUTPATH
+ wifi_status
sleep $INTERVAL
done
diff --git a/jsk_fetch_robot/jsk_fetch_startup/scripts/network_monitor.py b/jsk_fetch_robot/jsk_fetch_startup/scripts/network_monitor.py
index 1f67266a30..782f5479a5 100755
--- a/jsk_fetch_robot/jsk_fetch_startup/scripts/network_monitor.py
+++ b/jsk_fetch_robot/jsk_fetch_startup/scripts/network_monitor.py
@@ -47,21 +47,21 @@
TOUCH_FILE = "/home/fetch/.Network_Monitor_Restarted_Robot"
-def ping(use_arping, hosts):
+def ping(use_arping, hosts, network_interface='wlan0'):
for host in hosts:
for _ in xrange(5):
print(datetime.now(),"Sending ping request")
if use_arping:
- response = os.system("arping -I wlan0 -c 1 " + host)
+ response = os.system("arping -I {} -c 1 {}".format(network_interface, host))
else:
- response = os.system("ping -c 1 -q " + host)
+ response = os.system("ping -c 1 -q {}".format(host))
if response == 0:
return True
sleep(5)
return False
-def get_sanshiro():
- return [['sanshiro', 'sanshiro']]
+def get_sanshiro(network_profile_id):
+ return [[network_profile_id, 'sanshiro']]
def get_saved_networks(filepaths=None):
# NetworkManager has its own ID for networks, often multiple for the same
@@ -90,19 +90,19 @@ def get_saved_networks(filepaths=None):
# for reconnecting to 'sanshiro'
-def reconnect_to_wlan():
- if call(["nmcli", "d", "disconnect", "iface", "wlan0"]) == 0:
+def reconnect_to_wlan(network_interface='wlan0', network_profile_id='sanshiro'):
+ if call(["nmcli", "d", "disconnect", "iface", network_interface]) == 0:
sleep(0.3)
- print("disconnect from wlan0")
+ print("Network disconnected with interface \"{}\"".format(network_interface))
else:
- print("'nmcli d disconnect iface wlan0' do not work correctly!")
+ print("'nmcli d disconnect iface {}' do not work correctly!".format(network_interface))
- if call(["nmcli", "c", "up", "id", "sanshiro"]) == 0:
+ if call(["nmcli", "c", "up", "id", network_profile_id]) == 0:
sleep(0.3)
- print("connect to sanshiro")
+ print("Network connected with profile \"{}\"".format(network_profile_id))
return True
else:
- print("'nmcli c up id sanshiro' do not work correctly!")
+ print("'nmcli c up id {}' do not work correctly!".format(network_profile_id))
return False
@@ -150,13 +150,13 @@ def connect_by_nmcli_id(nid, ssid="SSID not given"):
return False
-def attempt_reconnect_to_network():
+def attempt_reconnect_to_network(network_interface, network_profile_id):
# First, try to connect to sanshiro
- if connect_by_nmcli_id('sanshiro', 'sanshiro'):
+ if connect_by_nmcli_id(network_profile_id, 'sanshiro'):
return True
# Get list of stored 'wireless' connections; [id, ssid]
- known = get_saved_networks() # alternative : known = get_sanshiro()
+ known = get_saved_networks() # alternative : known = get_sanshiro(network_profile_id)
# Get list of unique available wifi network ssids and their strongest signal
avail = get_avail_networks_by_strength()
@@ -170,7 +170,7 @@ def attempt_reconnect_to_network():
for ntwk in to_try:
if connect_by_nmcli_id(*ntwk):
return True
- if reconnect_to_wlan():
+ if reconnect_to_wlan(network_interface, network_profile_id):
return True
return False
@@ -249,12 +249,12 @@ def main(args):
while True:
try:
# Check if we can ping the access point
- if not ping(args.arping, hostnames):
+ if not ping(args.arping, hostnames, args.interface):
print(datetime.now(), "Cannot connect to", ', '.join(hostnames))
sound_goal.goal.sound_request.arg = "ピングが通りません"
pub.publish(sound_goal)
# Try to connect to any known network
- if not attempt_reconnect_to_network():
+ if not attempt_reconnect_to_network(args.interface, args.profile):
# TODO use check_output instead of Popen and handle truly
# bad issues with computer restarts or notification.
print(datetime.now(), "Restarting network-manager")
@@ -302,6 +302,10 @@ def main(args):
help="One or more comma delimited hostname(s) to ping. Hostnames will "
"be tried in order supplied until one is successfully contacted. Default: "
"Looks for NETWORK_MONITOR_HOSTNAMES in environment.")
+ parser.add_argument('-I', '--interface', default='wlan0',
+ help='Network interface to be used.')
+ parser.add_argument('--profile', default='sanshiro',
+ help='Network profile to be used.')
parser.add_argument("-a", "--arping", action='store_true',
help="Use arping instead of ping.")
parser.add_argument("--enable-reboot-option", action='store_true',
diff --git a/jsk_fetch_robot/jsk_fetch_startup/scripts/storage_warning.sh b/jsk_fetch_robot/jsk_fetch_startup/scripts/storage_warning.sh
new file mode 100755
index 0000000000..10f059f0b4
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/scripts/storage_warning.sh
@@ -0,0 +1,40 @@
+#!/usr/bin/env bash
+
+# Check storage percentage
+STORAGE_PERCENTAGE=`df -h / | awk 'NR==2 {print $5}' | sed -e 's/\%//g'`
+
+# If storage_percentage greater than 80%
+if [ $STORAGE_PERCENTAGE -gt 80 ]; then
+ SEND_EMAIL=1
+ # In root directory
+ ROOTDIR_STORAGE=`du -h -d 0 /* 2>/dev/null | sort -hr | awk '{print $2 " " $1}'`
+ # In home directory
+ HOMEDIR_STORAGE=`du -h -d 0 /home/* 2>/dev/null | sort -hr | awk '{print $2 " " $1}'`
+else
+ echo -e "No problem with the storace capacity. Storage percentage: $STORAGE_PERCENTAGE"
+fi
+
+if [ -n "$SEND_EMAIL" ]; then
+ rostopic pub -1 /email jsk_robot_startup/Email "header:
+ seq: 0
+ stamp: {secs: 0, nsecs: 0}
+ frame_id: ''
+subject: 'Storage warning'
+body: 'Storage usage is ${STORAGE_PERCENTAGE}%. Please remove unnecessary files.
+
+
+In root directory:
+
+${ROOTDIR_STORAGE}
+
+
+In home directory:
+
+${HOMEDIR_STORAGE}'
+sender_address: '$(hostname)@jsk.imi.i.u-tokyo.ac.jp'
+receiver_address: 'fetch@jsk.imi.i.u-tokyo.ac.jp'
+smtp_server: ''
+smtp_port: ''
+attached_files: []"
+ echo -e "Storage percentage: $STORAGE_PERCENTAGE\n Root directory: $ROOTDIR_STORAGE\n Home directory: $HOMEDIR_STORAGE\n"
+fi
diff --git a/jsk_fetch_robot/jsk_fetch_startup/scripts/time_signal.py b/jsk_fetch_robot/jsk_fetch_startup/scripts/time_signal.py
index ca5781dc44..083e12c658 100755
--- a/jsk_fetch_robot/jsk_fetch_startup/scripts/time_signal.py
+++ b/jsk_fetch_robot/jsk_fetch_startup/scripts/time_signal.py
@@ -8,19 +8,25 @@
import sys
import urllib2
+from dynamic_reconfigure.server import Server
+from jsk_fetch_startup.cfg import TimeSignalConfig as Config
from sound_play.msg import SoundRequestAction
from sound_play.msg import SoundRequestGoal
class TimeSignal(object):
- def __init__(self):
+ def __init__(self, volume=1.0):
self.client_en = actionlib.SimpleActionClient(
'/sound_play', SoundRequestAction)
self.client_jp = actionlib.SimpleActionClient(
'/robotsound_jp', SoundRequestAction)
self.now_time = datetime.now()
+ self.now_date = self.now_time.date()
self.now_hour = self.now_time.hour
+ self.now_minute = self.now_time.minute
self.day = self.now_time.strftime('%a')
+ self.volume = volume
+ self.srv = Server(Config, self.config_callback)
reload(sys)
sys.setdefaultencoding('utf-8')
api_key_file = rospy.get_param(
@@ -33,7 +39,7 @@ def speak(self, client, speech_text, lang=None):
sound_goal = SoundRequestGoal()
sound_goal.sound_request.sound = -3
sound_goal.sound_request.command = 1
- sound_goal.sound_request.volume = 1.0
+ sound_goal.sound_request.volume = self.volume
if lang is not None:
sound_goal.sound_request.arg2 = lang
sound_goal.sound_request.arg = speech_text
@@ -43,7 +49,9 @@ def speak(self, client, speech_text, lang=None):
def speak_jp(self):
# time signal
- speech_text = str(self.now_hour) + 'じです。'
+ speech_text = self._get_time_text(
+ self.now_date, self.now_hour, self.now_minute,
+ lang='ja')
if self.now_hour == 0:
speech_text += '早く帰りましょう。'
if self.now_hour == 12:
@@ -56,10 +64,8 @@ def speak_jp(self):
speech_text += 'そろそろ輪講です。'
if self.day == 'Tue' and self.now_hour == 15:
speech_text += '掃除の時間です。'
- if self.day == 'Fri' and self.now_hour == 14:
+ if self.day == 'Fri' and self.now_hour == 15:
speech_text += '創造輪講の時間です。'
- if self.day == 'Fri' and self.now_hour == 16:
- speech_text += '掃除の時間です。'
# weather forecast
if self.now_hour in [0, 7, 12, 19]:
@@ -72,7 +78,9 @@ def speak_jp(self):
self.speak(self.client_jp, speech_text, lang='jp')
def speak_en(self):
- speech_text = self._get_text(self.now_hour)
+ speech_text = self._get_time_text(
+ self.now_date, self.now_hour, self.now_minute,
+ lang='en')
# time signal
if self.now_hour == 0:
speech_text += " Let's go home."
@@ -80,6 +88,14 @@ def speak_en(self):
speech_text += " Let's go to lunch."
if self.now_hour == 19:
speech_text += " Let's go to dinner."
+ if self.day == 'Mon' and self.now_hour == 12:
+ speech_text += ' The lab meeting will start soon.'
+ if self.day == 'Tue' and self.now_hour == 12:
+ speech_text += ' The lab meeting will start soon.'
+ if self.day == 'Tue' and self.now_hour == 15:
+ speech_text += ' It is cleaning time now.'
+ if self.day == 'Fri' and self.now_hour == 15:
+ speech_text += ' Rinko will start soon. '
# weather forecast
if self.now_hour in [0, 7, 12, 19]:
@@ -91,18 +107,33 @@ def speak_en(self):
rospy.logdebug(speech_text)
self.speak(self.client_en, speech_text)
- def _get_text(self, hour):
- if hour == 0:
- text = 'midnight'
- elif hour == 12:
- text = 'noon'
+ def _get_time_text(self, date, hour, minute, lang='en'):
+ if lang == 'ja':
+ if hour == 0 and minute == 0:
+ time_text = '{}年{}月{}日'.format(
+ date.year, date.month, date.day)
+ elif hour == 12 and minute == 0:
+ time_text = '正午'
+ else:
+ time_text = '{}時'.format(hour)
+ if minute != 0:
+ time_text += '{}分'.format(minute)
+ time_text += 'です。'
else:
- if hour > 12:
- text = str(hour % 12) + ' P.M.'
+ if hour == 0 and minute == 0:
+ time_text = date.strftime('%Y %B %d')
+ elif hour == 12 and minute == 0:
+ time_text = 'noon'
else:
- text = str(hour % 12) + ' A.M.'
- text = "It's " + text + "."
- return text
+ time_text = str(hour % 12)
+ if minute != 0:
+ time_text += ' {}'.format(minute)
+ if hour > 12:
+ time_text += ' P.M.'
+ else:
+ time_text += ' A.M.'
+ time_text = "It's {}.".format(time_text)
+ return time_text
def _get_weather_forecast(self, lang='en'):
url = 'http://api.openweathermap.org/data/2.5/weather?q=tokyo&lang={}&units=metric&appid={}'.format(lang, self.appid) # NOQA
@@ -126,6 +157,20 @@ def _get_weather_forecast(self, lang='en'):
forecast_text += " The wind speed is {} meter per second.".format(wind_speed)
return forecast_text
+ def _set_volume(self, volume):
+ '''
+ Set speak volume between 0.0 and 1.0
+ '''
+ volume = min(max(0.0, volume), 1.0)
+ if self.volume != volume:
+ self.volume = volume
+ rospy.loginfo("time_signal's volume was set to {}".format(
+ self.volume))
+
+ def config_callback(self, config, level):
+ self._set_volume(config.volume)
+ return config
+
if __name__ == '__main__':
rospy.init_node('time_signal')
diff --git a/jsk_fetch_robot/jsk_fetch_startup/scripts/update_workspace.sh b/jsk_fetch_robot/jsk_fetch_startup/scripts/update_workspace.sh
index f27e401366..6fd0ba00d2 100755
--- a/jsk_fetch_robot/jsk_fetch_startup/scripts/update_workspace.sh
+++ b/jsk_fetch_robot/jsk_fetch_startup/scripts/update_workspace.sh
@@ -1,43 +1,9 @@
#!/usr/bin/env bash
-. $HOME/ros/melodic/devel/setup.bash
-# Filename should end with .txt to preview the contents in a web browser
-LOGFILE=$HOME/ros/melodic/update_workspace.txt
-
-{
-set -x
-# Update workspace
-cd $HOME/ros/melodic/src
-ln -sf $(rospack find jsk_fetch_startup)/../jsk_fetch.rosinstall.$ROS_DISTRO $HOME/ros/melodic/src/.rosinstall
-wstool foreach --git 'git stash'
-wstool update --delete-changed-uris
-WSTOOL_UPDATE_RESULT=$?
-cd $HOME/ros/melodic
-catkin clean aques_talk collada_urdf_jsk_patch -y
-catkin init
-catkin config -DCMAKE_BUILD_TYPE=Release
-catkin build
-CATKIN_BUILD_RESULT=$?
-# Send mail
-MAIL_BODY=""
-if [ $WSTOOL_UPDATE_RESULT -ne 0 ]; then
- MAIL_BODY=$MAIL_BODY"Please wstool update workspace manually. "
-fi
-if [ $CATKIN_BUILD_RESULT -ne 0 ]; then
- MAIL_BODY=$MAIL_BODY"Please catkin build workspace manually."
-fi
-set +x
-} > $LOGFILE 2>&1
-if [ -n "$MAIL_BODY" ]; then
- rostopic pub -1 /email jsk_robot_startup/Email "header:
- seq: 0
- stamp: {secs: 0, nsecs: 0}
- frame_id: ''
-subject: 'Daily workspace update fails'
-body: '$MAIL_BODY'
-sender_address: '$(hostname)@jsk.imi.i.u-tokyo.ac.jp'
-receiver_address: 'fetch@jsk.imi.i.u-tokyo.ac.jp'
-smtp_server: ''
-smtp_port: ''
-attached_files: ['$LOGFILE']"
-fi
+cp $(rospack find jsk_robot_startup)/scripts/update_workspace_main.sh /tmp/update_workspace.sh
+# jsk_footstep_planner is not released for melodic
+# jsk_footstep_controller is not released for melodic
+# librealsense2 should not be installed from ROS repository
+# realsense-ros should not be installed from ROS repository
+/tmp/update_workspace.sh -r $(rospack find jsk_fetch_startup)/../jsk_fetch.rosinstall.$ROS_DISTRO -t fetch -s "jsk_footstep_controller jsk_footstep_planner librealsense2 realsense2_camera realsense2_description"
+rm /tmp/update_workspace.sh
diff --git a/jsk_fetch_robot/jsk_fetch_startup/scripts/warning.py b/jsk_fetch_robot/jsk_fetch_startup/scripts/warning.py
index decf7e9d1d..029e8b281c 100755
--- a/jsk_fetch_robot/jsk_fetch_startup/scripts/warning.py
+++ b/jsk_fetch_robot/jsk_fetch_startup/scripts/warning.py
@@ -9,7 +9,6 @@
from sound_play.libsoundplay import SoundClient
from actionlib_msgs.msg import GoalStatus, GoalStatusArray
-from diagnostic_msgs.msg import DiagnosticArray, DiagnosticStatus
from fetch_driver_msgs.msg import RobotState
from geometry_msgs.msg import Twist
from power_msgs.msg import BatteryState, BreakerState
@@ -36,40 +35,6 @@ def terminate_thread(thread):
ctypes.pythonapi.PyThreadState_SetAsyncExc(thread.ident, None)
raise SystemError("PyThreadState_SetAsyncExc failed")
-class DiagnosticsSpeakThread(threading.Thread):
- def __init__(self, error_status):
- threading.Thread.__init__(self)
- self.volume = rospy.get_param("~volume", 1.0)
- self.error_status = error_status
- self.start()
-
- def run(self):
- global sound
- for status in self.error_status:
- # ignore error status if the error already occured in the latest 10 minites
- if status.message in error_status_in_10_min:
- if rospy.Time.now().secs - error_status_in_10_min[status.message] < 600:
- continue
- else:
- error_status_in_10_min[status.message] = rospy.Time.now().secs
- else:
- error_status_in_10_min[status.message] = rospy.Time.now().secs
- # we can ignore "Joystick not open."
- if status.message == "Joystick not open." :
- continue
- if status.name == "supply_breaker" and status.message == "Disabled." :
- continue
- #
- text = "Error on {}, {}".format(status.name, status.message)
- rospy.loginfo(text)
- text = text.replace('_', ', ')
- sound.say(text, 'voice_kal_diphone', volume=self.volume)
- time.sleep(5)
-
- def stop(self):
- terminate_thread(self)
- self.join()
-
class Warning:
def __init__(self):
time.sleep(1)
@@ -77,22 +42,13 @@ def __init__(self):
self.battery_state_msgs = BatteryState()
self.twist_msgs = Twist()
#
- self.diagnostics_speak_thread = {}
self.auto_undocking = False
- self.diagnostics_list = []
- if rospy.get_param("~speak_warn", True):
- self.diagnostics_list.append(DiagnosticStatus.WARN)
- if rospy.get_param("~speak_error", True):
- self.diagnostics_list.append(DiagnosticStatus.ERROR)
- if rospy.get_param("~speak_stale", True):
- self.diagnostics_list.append(DiagnosticStatus.STALE)
#
self.base_breaker = rospy.ServiceProxy('base_breaker', BreakerCommand)
#
self.battery_sub = rospy.Subscriber("battery_state", BatteryState, self.battery_callback, queue_size = 1)
self.cmd_vel_sub = rospy.Subscriber("base_controller/command_unchecked", Twist, self.cmd_vel_callback, queue_size = 1)
self.robot_state_sub = rospy.Subscriber("robot_state", RobotState, self.robot_state_callback, queue_size = 1)
- self.diagnostics_status_sub = rospy.Subscriber("diagnostics", DiagnosticArray, self.diagnostics_status_callback, queue_size = 1)
self.undock_sub = rospy.Subscriber("/undock/status", GoalStatusArray, self.undock_status_callback)
#
self.cmd_vel_pub = rospy.Publisher("base_controller/command", Twist, queue_size=1)
@@ -140,29 +96,6 @@ def cmd_vel_callback(self, msg):
##
self.twist_msgs = msg
- def diagnostics_status_callback(self, msg):
- ##
- self.diagnostic_status_msgs = msg.status
- ##
- ## check if this comes from /robot_driver
- callerid = msg._connection_header['callerid']
- if callerid not in self.diagnostics_speak_thread:
- self.diagnostics_speak_thread[callerid] = None
- error_status = filter(lambda n: n.level in self.diagnostics_list, msg.status)
- # when RunStopped, ignore message from *_mcb and *_breaker
- if self.robot_state_msgs.runstopped:
- error_status = filter(lambda n: not (re.match("\w*_(mcb|breaker)",n.name) or (n.name == "Mainboard" and n.message == "Runstop pressed")), error_status)
- if not error_status : # error_status is not []
- if self.diagnostics_speak_thread[callerid] and self.diagnostics_speak_thread[callerid].is_alive():
- self.diagnostics_speak_thread[callerid].stop()
- return
- # make sure that diagnostics_speak_thread is None, when the thread is terminated
- if self.diagnostics_speak_thread[callerid] and not self.diagnostics_speak_thread[callerid].is_alive():
- self.diagnostics_speak_thread[callerid] = None
- # run new thread
- if self.diagnostics_speak_thread[callerid] is None:
- self.diagnostics_speak_thread[callerid] = DiagnosticsSpeakThread(error_status)
-
if __name__ == "__main__":
global sound
# store error status and time of the error in the latest 10 minites
diff --git a/jsk_fetch_robot/jsk_fetch_startup/src/trashbins_pose_estimator.cpp b/jsk_fetch_robot/jsk_fetch_startup/src/trashbins_pose_estimator.cpp
new file mode 100644
index 0000000000..0adecd9ffb
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/src/trashbins_pose_estimator.cpp
@@ -0,0 +1,82 @@
+#include
+
+#include
+#include
+#include
+#include
+#include
+#include
+#include
+
+class TrashbinsPoseEstimator{
+private:
+ double _trashbinL, _trashbinW, _trashbinH; // trashbin size param
+ ros::Subscriber _trashbinHandleSub;
+ ros::Subscriber _pointCloud;
+ ros::Publisher _virtualTrashbinContainerPub;
+ jsk_recognition_msgs::BoundingBoxArray _trashbins; // trashbin object
+ geometry_msgs::Quaternion defaultOrientation;
+
+public:
+ // constructor
+ TrashbinsPoseEstimator(ros::NodeHandle &_nh, ros::NodeHandle &_pnh){
+ _pnh.getParam("trashbin_l", this->_trashbinL);
+ _pnh.getParam("trashbin_w", this->_trashbinW);
+ _pnh.getParam("trashbin_h", this->_trashbinH);
+ this->_trashbinHandleSub = _nh.subscribe("input", 10, &TrashbinsPoseEstimator::DrawVirtualTrashbinContainerCB, this);
+ this->_virtualTrashbinContainerPub = _nh.advertise("output", 10);
+ // init default orientation const
+ this->defaultOrientation.w = 1.0;
+ this->defaultOrientation.x = 0.0;
+ this->defaultOrientation.y = 0.0;
+ this->defaultOrientation.z = 0.0;
+ };
+ // destructor
+ ~TrashbinsPoseEstimator(){
+ ROS_INFO("Killing node...");
+ };
+
+ // draw virtual trashbin container and publish for debugging
+ void DrawVirtualTrashbinContainerCB(const jsk_recognition_msgs::BoundingBoxArray& msg){
+ boost::shared_ptr handles(new jsk_recognition_msgs::BoundingBoxArray), trashbins(new jsk_recognition_msgs::BoundingBoxArray);
+ boost::shared_ptr handle(new jsk_recognition_msgs::BoundingBox), trashbin(new jsk_recognition_msgs::BoundingBox);
+ boost::shared_ptr handleCenterPosition(new geometry_msgs::Point), trashbinCenterPosition(new geometry_msgs::Point);
+
+ if (msg.boxes.empty()) {
+ ROS_DEBUG("No handle candidates");
+ } else {
+ ROS_DEBUG_STREAM(msg.boxes.size() << " handle candidates" << std::endl);
+ *handles = msg;
+ for (int i = 0; i < handles->boxes.size(); i++) {
+ *handle = handles->boxes.at(i);
+ // decide trashbin center position
+ *handleCenterPosition = handle->pose.position;
+ trashbinCenterPosition->x =
+ handleCenterPosition->x + this->_trashbinL / 2.0;
+ trashbinCenterPosition->y = handleCenterPosition->y;
+ trashbinCenterPosition->z =
+ handleCenterPosition->z - this->_trashbinH / 2.0;
+ // make BoundingBox trashbin
+ trashbin->header = handle->header;
+ trashbin->pose.position = *trashbinCenterPosition;
+ trashbin->pose.orientation = this->defaultOrientation;
+ trashbin->dimensions.x = this->_trashbinL;
+ trashbin->dimensions.y = this->_trashbinW;
+ trashbin->dimensions.z = this->_trashbinH;
+ trashbin->label = i;
+ trashbins->boxes.push_back(*trashbin);
+ }
+ trashbins->header = handles->header;
+ this->_virtualTrashbinContainerPub.publish(*trashbins);
+ this->_trashbins = *trashbins;
+ }
+ }
+};
+
+int main(int argc, char **argv){
+ ros::init(argc, argv, "trashbin_pose_estimator");
+ ros::NodeHandle nh;
+ ros::NodeHandle pnh("~");
+ TrashbinsPoseEstimator node = TrashbinsPoseEstimator(nh, pnh);
+ ros::spin();
+}
diff --git a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-app-scheduler.conf b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-app-scheduler.conf
index 57944374f6..23dcfcb3be 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-app-scheduler.conf
+++ b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-app-scheduler.conf
@@ -1,8 +1,9 @@
[program:jsk-app-scheduler]
-command=/bin/bash -c ". /opt/ros/roscore_poststart.bash && . /home/fetch/ros/melodic/devel/setup.bash && rosrun jsk_fetch_startup wait_app_manager.bash && roslaunch app_scheduler app_scheduler.launch yaml_path:=/var/lib/robot/app_schedule.yaml --wait --screen"
+command=/bin/bash -c ". /opt/ros/roscore_poststart.bash && . /home/fetch/ros/melodic/devel/setup.bash && if [ -e /var/lib/robot/config.bash ];then . /var/lib/robot/config.bash ;fi && export ROS_MASTER_URI=http://localhost:11311 && rossetclient $NETWORK_DEFAULT_ROS_INTERFACE && rosrun jsk_fetch_startup wait_app_manager.bash && roslaunch app_scheduler app_scheduler.launch yaml_path:=/var/lib/robot/app_schedule.yaml --wait --screen"
stopsignal=TERM
directory=/home/fetch/ros/melodic
-autostart=true
+; autostart=true
+autostart=false
autorestart=false
stdout_logfile=/var/log/ros/jsk-app-scheduler.log
stderr_logfile=/var/log/ros/jsk-app-scheduler.log
diff --git a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-coral.conf b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-coral.conf
deleted file mode 100644
index d7cf1778cf..0000000000
--- a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-coral.conf
+++ /dev/null
@@ -1,11 +0,0 @@
-[program:jsk-coral]
-command=/bin/bash -c ". /opt/ros/roscore_poststart.bash && . /home/fetch/ros/coral_ws/devel/setup.bash && roslaunch coral_usb edgetpu_object_detector.launch INPUT_IMAGE:=/head_camera/rgb/image_rect_color model_file:=/home/fetch/.ros/data/coral_usb/mobilenet_v2_ssd_73b2_kitchen_finetuning_20200528.tflite label_file:=/home/fetch/.ros/data/coral_usb/73b2_kitchen_labels.txt --screen --wait"
-stopsignal=TERM
-directory=/home/fetch/ros/coral_ws
-autostart=true
-autorestart=false
-stdout_logfile=/var/log/ros/jsk-coral.log
-stderr_logfile=/var/log/ros/jsk-coral.log
-user=fetch
-environment=ROSCONSOLE_FORMAT="[${severity}] [${time}] [${node}:${logger}]: ${message}",PYTHONUNBUFFERED=1
-priority=200
diff --git a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-dialog.conf b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-dialog.conf
index 581d4d8f87..50db8b9ed5 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-dialog.conf
+++ b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-dialog.conf
@@ -1,11 +1,12 @@
[program:jsk-dialog]
-command=/bin/bash -c ". /opt/ros/roscore_poststart.bash && . /home/fetch/ros/melodic/devel/setup.bash && rosrun jsk_fetch_startup wait_app_manager.bash && roslaunch dialogflow_task_executive dialogflow_task_executive.launch run_app_manager:=false --wait --screen"
+command=/bin/bash -c ". /opt/ros/roscore_poststart.bash && . /home/fetch/ros/melodic/devel/setup.bash && if [ -e /var/lib/robot/config.bash ];then . /var/lib/robot/config.bash ;fi && export ROS_MASTER_URI=http://localhost:11311 && rossetclient $NETWORK_DEFAULT_ROS_INTERFACE && rosrun jsk_fetch_startup wait_app_manager.bash && roslaunch jsk_fetch_startup fetch_dialogflow_task_executive.launch run_app_manager:=false webhook_server:=true hostname:=$(hostname) --wait --screen "
stopsignal=TERM
directory=/home/fetch/ros/melodic
-autostart=true
+; autostart=true
+autostart=false
autorestart=false
stdout_logfile=/var/log/ros/jsk-dialog.log
stderr_logfile=/var/log/ros/jsk-dialog.log
user=fetch
-environment=ROSCONSOLE_FORMAT="[${severity}] [${time}] [${node}:${logger}]: ${message}",GOOGLE_APPLICATION_CREDENTIALS=/var/lib/robot/dialogflow/JSK-Fetch-a384d3498680.json,DIALOGFLOW_PROJECT_ID=fetch-kiedno,PYTHONUNBUFFERED=1
+environment=ROSCONSOLE_FORMAT="[${severity}] [${time}] [${node}:${logger}]: ${message}",GOOGLE_APPLICATION_CREDENTIALS=/var/lib/robot/dialogflow/fetch-credential.json,DIALOGFLOW_PROJECT_ID=fetch-kiedno,PYTHONUNBUFFERED=1
priority=200
diff --git a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-dstat.conf b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-dstat.conf
new file mode 100644
index 0000000000..4fcf56a3e3
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-dstat.conf
@@ -0,0 +1,11 @@
+; Install dstat
+; sudo apt install dstat
+[program:jsk-dstat]
+command=/bin/bash -c ". /opt/ros/roscore_poststart.bash && . /home/fetch/ros/melodic/devel/setup.bash && rosrun jsk_fetch_startup dstat.bash"
+stopsignal=TERM
+autostart=true
+autorestart=false
+stdout_logfile=/var/log/ros/jsk-dstat.log
+stderr_logfile=/var/log/ros/jsk-dstat.log
+user=root
+priority=1
diff --git a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-fetch-startup-outside.conf b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-fetch-startup-outside.conf
new file mode 100644
index 0000000000..463ddf138e
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-fetch-startup-outside.conf
@@ -0,0 +1,11 @@
+[program:jsk-fetch-startup-outside]
+command=/bin/bash -c ". /opt/ros/roscore_poststart.bash && . /home/fetch/ros/melodic/devel/setup.bash && if [ -e /var/lib/robot/config_outside.bash ];then . /var/lib/robot/config_outside.bash ;fi && export ROS_MASTER_URI=http://localhost:11311 && rossetclient $NETWORK_DEFAULT_ROS_INTERFACE && rosrun jsk_fetch_startup setup_audio.bash && roslaunch jsk_fetch_startup fetch_bringup.launch hostname:=$(hostname) boot_sound:=true default_speaker:=$DEFAULT_SPEAKER default_english_speaker:=$DEFAULT_ENGLISH_SPEAKER default_warning_speaker:=$DEFAULT_WARNING_SPEAKER network_interface:=$NETWORK_DEFAULT_WIFI_INTERFACE --wait"
+stopsignal=TERM
+directory=/home/fetch/ros/melodic
+autostart=false
+autorestart=false
+stdout_logfile=/var/log/ros/jsk-fetch-startup.log
+stderr_logfile=/var/log/ros/jsk-fetch-startup.log
+user=fetch
+environment=ROSCONSOLE_FORMAT="[${severity}] [${time}] [${node}:${logger}]: ${message}",AUDIO_DEVICE="alsa_output.usb-1130_USB_AUDIO-00.analog-stereo",PYTHONUNBUFFERED=1
+priority=100
diff --git a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-fetch-startup.conf b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-fetch-startup.conf
index 5292717154..5efe6fb1be 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-fetch-startup.conf
+++ b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-fetch-startup.conf
@@ -1,5 +1,5 @@
[program:jsk-fetch-startup]
-command=/bin/bash -c ". /opt/ros/roscore_poststart.bash && . /home/fetch/ros/melodic/devel/setup.bash && rosrun jsk_fetch_startup setup_audio.bash && roslaunch jsk_fetch_startup fetch_bringup.launch hostname:=$(hostname) boot_sound:=true use_voice_text:=false --wait"
+command=/bin/bash -c ". /opt/ros/roscore_poststart.bash && . /home/fetch/ros/melodic/devel/setup.bash && if [ -e /var/lib/robot/config.bash ];then . /var/lib/robot/config.bash ;fi && export ROS_MASTER_URI=http://localhost:11311 && rossetclient $NETWORK_DEFAULT_ROS_INTERFACE && rosrun jsk_fetch_startup setup_audio.bash && roslaunch jsk_fetch_startup fetch_bringup.launch hostname:=$(hostname) --wait"
stopsignal=TERM
directory=/home/fetch/ros/melodic
autostart=true
@@ -7,5 +7,5 @@ autorestart=false
stdout_logfile=/var/log/ros/jsk-fetch-startup.log
stderr_logfile=/var/log/ros/jsk-fetch-startup.log
user=fetch
-environment=ROSCONSOLE_FORMAT="[${severity}] [${time}] [${node}:${logger}]: ${message}",AUDIO_DEVICE="alsa_output.usb-1130_USB_AUDIO-00.analog-stereo",PYTHONUNBUFFERED=1
+environment=ROSCONSOLE_FORMAT="[${severity}] [${time}] [${node}:${logger}]: ${message}",PYTHONUNBUFFERED=1
priority=100
diff --git a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-gdrive.conf b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-gdrive.conf
index a79cc1deb3..dd8e281cda 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-gdrive.conf
+++ b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-gdrive.conf
@@ -1,8 +1,9 @@
[program:jsk-gdrive]
-command=/bin/bash -c ". /opt/ros/roscore_poststart.bash && . /home/fetch/ros/melodic/devel/setup.bash && roslaunch gdrive_ros gdrive_server.launch --wait --screen"
+command=/bin/bash -c ". /opt/ros/roscore_poststart.bash && . /home/fetch/ros/melodic/devel/setup.bash && if [ -e /var/lib/robot/config.bash ];then . /var/lib/robot/config.bash ;fi && export ROS_MASTER_URI=http://localhost:11311 && rossetclient $NETWORK_DEFAULT_ROS_INTERFACE && roslaunch gdrive_ros gdrive_server.launch --wait --screen respawn:=true"
stopsignal=TERM
directory=/home/fetch/ros/melodic
-autostart=true
+; autostart=true
+autostart=false
autorestart=false
stdout_logfile=/var/log/ros/jsk-gdrive.log
stderr_logfile=/var/log/ros/jsk-gdrive.log
diff --git a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-log-wifi.conf b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-log-wifi.conf
index cdb54b8638..a9723545b8 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-log-wifi.conf
+++ b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-log-wifi.conf
@@ -1,5 +1,5 @@
[program:jsk-log-wifi]
-command=/bin/bash -c ". /home/fetch/ros/melodic/devel/setup.bash && rosrun jsk_fetch_startup log-wifi-link.sh"
+command=/bin/bash -c ". /home/fetch/ros/melodic/devel/setup.bash && if [ -e /var/lib/robot/config.bash ];then . /var/lib/robot/config.bash ;fi && rosrun jsk_fetch_startup log-wifi-link.sh -I $NETWORK_DEFAULT_WIFI_INTERFACE"
stopsignal=TERM
autostart=true
autorestart=false
diff --git a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-network-monitor-outside.conf b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-network-monitor-outside.conf
new file mode 100644
index 0000000000..2dbd597ae2
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-network-monitor-outside.conf
@@ -0,0 +1,10 @@
+[program:jsk-network-monitor-outside]
+command=/bin/bash -c ". /home/fetch/ros/melodic/devel/setup.bash && if [ -e /var/lib/robot/config_outside.bash ];then . /var/lib/robot/config_outside.bash ;fi && export ROS_MASTER_URI=http://localhost:11311 && rossetclient $NETWORK_DEFAULT_ROS_INTERFACE && rosrun jsk_fetch_startup network_monitor.py --interface $NETWORK_DEFAULT_WIFI_INTERFACE --profile $NETWORK_DEFAULT_PROFILE_ID"
+stopsignal=TERM
+autostart=false
+autorestart=false
+stdout_logfile=/var/log/ros/jsk-network-monitor.log
+stderr_logfile=/var/log/ros/jsk-network-monitor.log
+user=root
+environment=ROSCONSOLE_FORMAT="[${severity}] [${time}] [${node}:${logger}]: ${message}",NETWORK_MONITOR_HOSTNAMES="google.com",PYTHONUNBUFFERED=1
+priority=200
diff --git a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-network-monitor.conf b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-network-monitor.conf
index bf05c87a6b..30e1578f91 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-network-monitor.conf
+++ b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-network-monitor.conf
@@ -1,5 +1,5 @@
[program:jsk-network-monitor]
-command=/bin/bash -c ". /home/fetch/ros/melodic/devel/setup.bash && rosrun jsk_fetch_startup network_monitor.py"
+command=/bin/bash -c ". /home/fetch/ros/melodic/devel/setup.bash && if [ -e /var/lib/robot/config.bash ];then . /var/lib/robot/config.bash ;fi && export ROS_MASTER_URI=http://localhost:11311 && rossetclient $NETWORK_DEFAULT_ROS_INTERFACE && rosrun jsk_fetch_startup network_monitor.py --interface $NETWORK_DEFAULT_WIFI_INTERFACE --profile $NETWORK_DEFAULT_PROFILE_ID"
stopsignal=TERM
autostart=true
autorestart=false
diff --git a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-rfcomm-bind.conf b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-rfcomm-bind.conf
index 16f10c4710..b80954f2ab 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-rfcomm-bind.conf
+++ b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-rfcomm-bind.conf
@@ -1,5 +1,5 @@
[program:jsk-rfcomm-bind]
-command=/bin/bash -c ". /opt/ros/roscore_poststart.bash && . /home/fetch/ros/melodic/devel/setup.bash && roslaunch jsk_robot_startup rfcomm_bind.launch --wait"
+command=/bin/bash -c ". /opt/ros/roscore_poststart.bash && . /home/fetch/ros/melodic/devel/setup.bash && if [ -e /var/lib/robot/config.bash ];then . /var/lib/robot/config.bash ;fi && export ROS_MASTER_URI=http://localhost:11311 && rossetclient $NETWORK_DEFAULT_ROS_INTERFACE && roslaunch jsk_robot_startup rfcomm_bind.launch --wait"
stopsignal=TERM
directory=/home/fetch/ros/melodic
diff --git a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-shutdown.conf b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-shutdown.conf
index bdc0bd78eb..37feca3d06 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-shutdown.conf
+++ b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-shutdown.conf
@@ -1,5 +1,5 @@
[program:jsk-shutdown]
-command=/bin/bash -c ". /opt/ros/roscore_poststart.bash && . /home/fetch/ros/melodic/devel/setup.bash && rosrun jsk_robot_startup shutdown.py --wait"
+command=/bin/bash -c ". /opt/ros/roscore_poststart.bash && . /home/fetch/ros/melodic/devel/setup.bash && if [ -e /var/lib/robot/config.bash ];then . /var/lib/robot/config.bash ;fi && export ROS_MASTER_URI=http://localhost:11311 && rossetclient $NETWORK_DEFAULT_ROS_INTERFACE && rosrun jsk_robot_startup shutdown.py ~input:=/battery_state _input_condition:='m.is_charging is False' --wait"
stopsignal=TERM
directory=/home/fetch/ros/melodic
diff --git a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-switch-wifi-73b2.conf b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-switch-wifi-73b2.conf
new file mode 100644
index 0000000000..52656f1761
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-switch-wifi-73b2.conf
@@ -0,0 +1,8 @@
+[program:jsk-switch-wifi-73b2]
+command=nmcli c up sanshiro-73B2
+stopsignal=TERM
+autostart=false
+autorestart=false
+stdout_logfile=/var/log/ros/jsk-switch-wifi.log
+stderr_logfile=/var/log/ros/jsk-switch-wifi.log
+user=root
diff --git a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-switch-wifi-outside.conf b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-switch-wifi-outside.conf
new file mode 100644
index 0000000000..d892d5be10
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/jsk-switch-wifi-outside.conf
@@ -0,0 +1,8 @@
+[program:jsk-switch-wifi-outside]
+command=nmcli c up sanshiro-outside
+stopsignal=TERM
+autostart=false
+autorestart=false
+stdout_logfile=/var/log/ros/jsk-switch-wifi.log
+stderr_logfile=/var/log/ros/jsk-switch-wifi.log
+user=root
diff --git a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/robot-outside.conf b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/robot-outside.conf
new file mode 100644
index 0000000000..90f32f5811
--- /dev/null
+++ b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/robot-outside.conf
@@ -0,0 +1,11 @@
+[program:robot-outside]
+command=/bin/bash -c ". /opt/ros/roscore_poststart.bash && . /home/fetch/ros/melodic/devel/setup.bash && if [ -e /var/lib/robot/config_outside.bash ];then . /var/lib/robot/config_outside.bash ;fi && export ROS_MASTER_URI=http://localhost:11311 && rossetclient $NETWORK_DEFAULT_ROS_INTERFACE && rosrun jsk_fetch_startup link_calibration_files.bash && roslaunch jsk_fetch_startup fetch.launch launch_teleop:=false --wait --screen"
+stopsignal=TERM
+directory=/home/fetch/ros/melodic
+autostart=false
+autorestart=unexpected
+stdout_logfile=/var/log/ros/robot.log
+stderr_logfile=/var/log/ros/robot.log
+user=ros
+environment=ROS_LOG_DIR=/var/log/ros,ROSCONSOLE_FORMAT="[${severity}] [${time}] [${node}:${logger}]: ${message}",FETCH_CALIBRATED_URDF=/etc/ros/melodic/calibrated_2020_12_04_02_08_34.urdf,FETCH_CALIBRATED_RGB=/etc/ros/melodic/rgb_2020_12_04_02_08_34.yaml,FETCH_CALIBRATED_DEPTH=/etc/ros/melodic/depth_2020_12_04_02_08_34.yaml,PYTHONUNBUFFERED=1
+priority=10
diff --git a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/robot.conf b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/robot.conf
index 0862a3af71..0b33af1409 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/robot.conf
+++ b/jsk_fetch_robot/jsk_fetch_startup/supervisor_scripts/robot.conf
@@ -1,5 +1,5 @@
[program:robot]
-command=/bin/bash -c ". /opt/ros/roscore_poststart.bash && . /home/fetch/ros/melodic/devel/setup.bash && if [ -e /var/lib/robot/config.bash ];then . /var/lib/robot/config.bash ;fi && rosrun jsk_fetch_startup link_calibration_files.bash && roslaunch jsk_fetch_startup fetch.launch launch_teleop:=false --wait --screen"
+command=/bin/bash -c ". /opt/ros/roscore_poststart.bash && . /home/fetch/ros/melodic/devel/setup.bash && if [ -e /var/lib/robot/config.bash ];then . /var/lib/robot/config.bash ;fi && export ROS_MASTER_URI=http://localhost:11311 && rossetclient $NETWORK_DEFAULT_ROS_INTERFACE && rosrun jsk_fetch_startup link_calibration_files.bash && roslaunch jsk_fetch_startup fetch.launch launch_teleop:=false --wait --screen"
stopsignal=TERM
directory=/home/fetch/ros/melodic
autostart=true
diff --git a/jsk_fetch_robot/jsk_fetch_startup/tmuxinator_yaml/log.yml b/jsk_fetch_robot/jsk_fetch_startup/tmuxinator_yaml/log.yml
index 5f2e1d51bf..85062f575d 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/tmuxinator_yaml/log.yml
+++ b/jsk_fetch_robot/jsk_fetch_startup/tmuxinator_yaml/log.yml
@@ -36,9 +36,14 @@ windows:
- jsk-fetch-startup: tail -f -n 1000 /var/log/ros/jsk-fetch-startup.log
- jsk-network-monitor: tail -f -n 1000 /var/log/ros/jsk-network-monitor.log
- jsk-log-wifi: tail -f -n 1000 /var/log/ros/jsk-log-wifi.log
- - jsk-app-scheduler: tail -f -n 1000 /var/log/ros/jsk-app-scheduler.log
- - jsk-coral: tail -f -n 1000 /var/log/ros/jsk-coral.log
- - jsk-dialog: tail -f -n 1000 /var/log/ros/jsk-dialog.log
- - jsk-gdrive: tail -f -n 1000 /var/log/ros/jsk-gdrive.log
- - jsk-shutdown: tail -f -n 1000 /var/log/ros/jsk-shutdown.log
- - jsk-rfcomm-bind: tail -f -n 1000 /var/log/ros/jsk-rfcomm-bind.log
+ - jsk-dstat: tail -f -n 1000 /var/log/ros/jsk-dstat.log
+ # - jsk-app-scheduler: tail -f -n 1000 /var/log/ros/jsk-app-scheduler.log
+ # - jsk-coral: tail -f -n 1000 /var/log/ros/jsk-coral.log
+ # - jsk-object-detector: tail -f -n 1000 /var/log/ros/jsk-object-detector.log
+ # - jsk-panorama-object-detector: tail -f -n 1000 /var/log/ros/jsk-panorama-object-detector.log
+ # - jsk-human-pose-estimator: tail -f -n 1000 /var/log/ros/jsk-human-pose-estimator.log
+ # - jsk-panorama-human-pose-estimator: tail -f -n 1000 /var/log/ros/jsk-panorama-human-pose-estimator.log
+ # - jsk-dialog: tail -f -n 1000 /var/log/ros/jsk-dialog.log
+ # - jsk-gdrive: tail -f -n 1000 /var/log/ros/jsk-gdrive.log
+ # - jsk-shutdown: tail -f -n 1000 /var/log/ros/jsk-shutdown.log
+ # - jsk-rfcomm-bind: tail -f -n 1000 /var/log/ros/jsk-rfcomm-bind.log
diff --git a/jsk_fetch_robot/jsk_fetch_startup/udev_rules/80-arduino.rules b/jsk_fetch_robot/jsk_fetch_startup/udev_rules/80-arduino.rules
index 4606864732..f80fad6045 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/udev_rules/80-arduino.rules
+++ b/jsk_fetch_robot/jsk_fetch_startup/udev_rules/80-arduino.rules
@@ -1,3 +1,10 @@
# You can access arduino attached to fetch via /dev/arduino
# https://github.com/start-jsk/jsk_apc/blob/16c004c511e864478aa6581a04c5a023e5fde391/jsk_arc2017_baxter/udev/90-rosserial.rules
SUBSYSTEM=="tty", ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6001", SYMLINK+="arduino", MODE="0666"
+
+# The following device is for arduino nano every in nakane hand version 1
+# Please update idVendor and idProduct if you use a different microcontroller
+SUBSYSTEM=="tty", ATTRS{idVendor}=="2341", ATTRS{idProduct}=="0058", SYMLINK+="nakane_hand", MODE="0666"
+
+# The following device is for M5Atom S3 for smart device protocol interface by k-shinjo 2024/1/9
+SUBSYSTEM=="tty", ATTRS{idVendor}=="303A", ATTRS{idProduct}=="1001", SYMLINK+="smart_device_protocol_interface", MODE="0666"
diff --git a/jsk_fetch_robot/jsk_fetch_startup/udev_rules/99-jsk-ps3joy.rules b/jsk_fetch_robot/jsk_fetch_startup/udev_rules/99-jsk-ps3joy.rules
index 113b5af453..05f7eb15b3 100644
--- a/jsk_fetch_robot/jsk_fetch_startup/udev_rules/99-jsk-ps3joy.rules
+++ b/jsk_fetch_robot/jsk_fetch_startup/udev_rules/99-jsk-ps3joy.rules
@@ -3,3 +3,4 @@
# https://github.com/fetchrobotics/fetch_robots/blob/8e144f9a193129a0de5254075bbe5eb8245e1603/fetch_system_config/root/lib/udev/rules.d/99-ps3joy.rules
# Current 99-ps3joy.rules in fetchrobotics/fetch_robots is for PS4 controller, but we still use PS3 controller.
KERNEL=="js?", SUBSYSTEM=="input", ATTRS{name}=="Sony PLAYSTATION(R)3 Controller", SYMLINK+="ps3joy"
+KERNEL=="js?", SUBSYSTEM=="input", ATTRS{name}=="PLAYSTATION(R)3 Controller", SYMLINK+="ps3joy"
diff --git a/jsk_pr2_robot/jsk_pr2_startup/scripts/update_workspace.sh b/jsk_pr2_robot/jsk_pr2_startup/scripts/update_workspace.sh
new file mode 100755
index 0000000000..3dbf85dd09
--- /dev/null
+++ b/jsk_pr2_robot/jsk_pr2_startup/scripts/update_workspace.sh
@@ -0,0 +1,5 @@
+#!/usr/bin/env bash
+
+cp $(rospack find jsk_robot_startup)/scripts/update_workspace_main.sh /tmp/update_workspace.sh
+/tmp/update_workspace.sh -w $HOME/ros/indigo -r $(rospack find jsk_pr2_startup)/jsk_pr2.rosinstall -t pr2 -u
+rm /tmp/update_workspace.sh
diff --git a/jsk_robot_common/complex_recovery/CMakeLists.txt b/jsk_robot_common/complex_recovery/CMakeLists.txt
new file mode 100644
index 0000000000..7dd42684f9
--- /dev/null
+++ b/jsk_robot_common/complex_recovery/CMakeLists.txt
@@ -0,0 +1,89 @@
+cmake_minimum_required(VERSION 2.8.3)
+project(complex_recovery)
+
+add_compile_options(-std=c++11)
+
+find_package(catkin REQUIRED
+ COMPONENTS
+ costmap_2d
+ nav_core
+ pluginlib
+ roscpp
+ tf2
+ tf2_ros
+)
+
+catkin_package(
+ INCLUDE_DIRS include
+ LIBRARIES complex_recovery
+ CATKIN_DEPENDS
+ costmap_2d
+ nav_core
+ pluginlib
+ roscpp
+ tf2
+ tf2_ros
+)
+
+# Abort if indigo or kinetic
+if ( $ENV{ROS_DISTRO} STREQUAL "indigo" OR $ENV{ROS_DISTRO} STREQUAL "kinetic" )
+ return()
+endif()
+
+include_directories(
+ include
+ ${catkin_INCLUDE_DIRS}
+)
+
+add_library(complex_recovery
+ src/sequential_complex_recovery.cpp
+ src/parallel_complex_recovery.cpp
+ src/utils.cpp
+)
+add_dependencies(complex_recovery
+ ${${PROJECT_NAME}_EXPORTED_TARGETS}
+ ${catkin_EXPORTED_TARGETS}
+)
+target_link_libraries(complex_recovery
+ ${catkin_LIBRARIES}
+)
+
+install(TARGETS complex_recovery
+ ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
+ LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
+ RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
+ )
+
+install(DIRECTORY include/${PROJECT_NAME}/
+ DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
+ FILES_MATCHING PATTERN "*.h"
+)
+
+install(FILES complex_recovery_plugins.xml
+ DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
+)
+
+#
+# Testing
+#
+if (CATKIN_ENABLE_TESTING)
+ find_package(rostest REQUIRED)
+
+ catkin_add_executable_with_gtest(sequential_complex_recovery_test_node
+ tests/sequential_complex_recovery_test_node.cpp
+ )
+ target_link_libraries(sequential_complex_recovery_test_node
+ ${catkin_LIBRARIES}
+ ${PROJECT_NAME}
+ )
+ add_rostest(tests/sequential_complex_recovery.test)
+
+ catkin_add_executable_with_gtest(parallel_complex_recovery_test_node
+ tests/parallel_complex_recovery_test_node.cpp
+ )
+ target_link_libraries(parallel_complex_recovery_test_node
+ ${catkin_LIBRARIES}
+ ${PROJECT_NAME}
+ )
+ add_rostest(tests/parallel_complex_recovery.test)
+endif()
diff --git a/jsk_robot_common/complex_recovery/README.md b/jsk_robot_common/complex_recovery/README.md
new file mode 100644
index 0000000000..fc65f10920
--- /dev/null
+++ b/jsk_robot_common/complex_recovery/README.md
@@ -0,0 +1,67 @@
+# complex_recovery
+
+This package provides recovery behavior plugins which combines multi recoveries to one recovery behavior.
+This is useful for assuring a set of recovery behavior to run at one time.
+
+There are two types of recoveries. One is to run multi recoveries sequentially and another is to run them in parallel.
+
+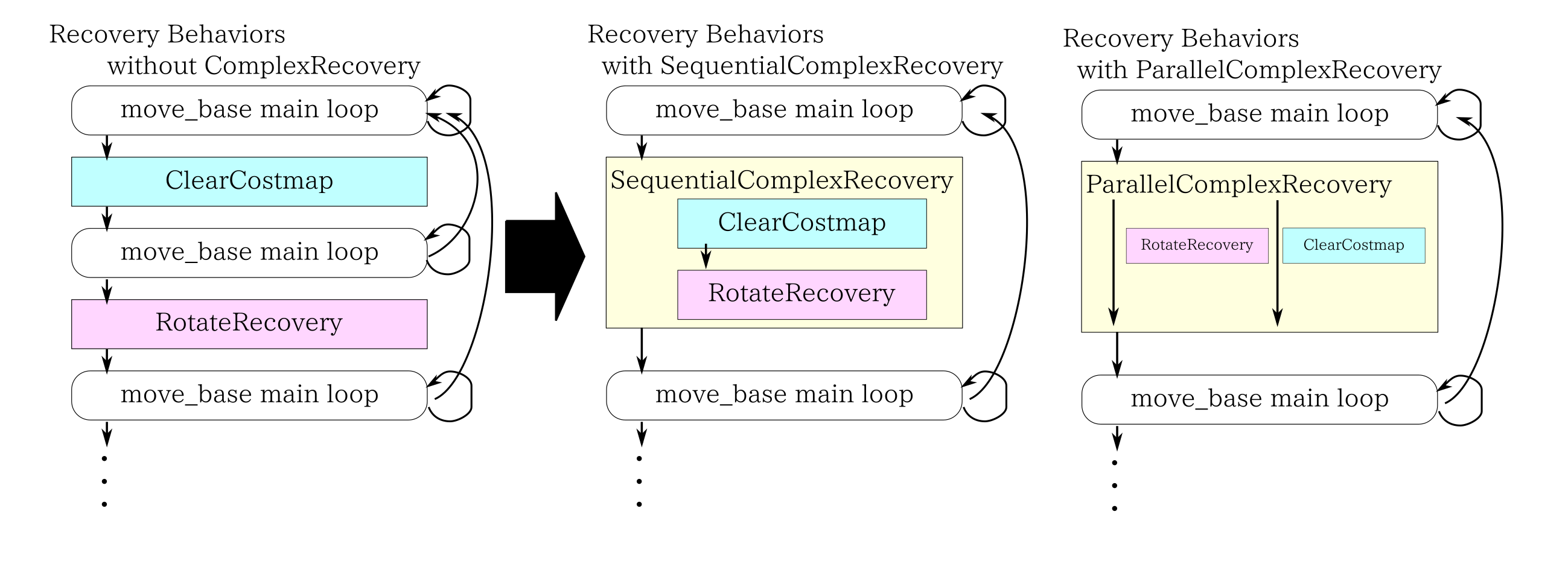
+
+## complex_recovery/SequentialComplexRecovery
+
+* `~recovery_behaviors` (list of dictionaries which has `name` and `type` entries, default: None)
+
+Example configuration of `move_base` is like
+
+```yaml
+recovery_behavior_enabled: true
+recovery_behaviors:
+ - name: "speak_then_clear_costmap0"
+ type: "complex_recovery/SequentialComplexRecovery"
+speak_then_clear_costmap0:
+ recovery_behaviors:
+ - name: "speak_and_wait0"
+ type: "speak_and_wait_recovery/SpeakAndWaitRecovery"
+ - name: "clear_costmap0"
+ type: "clear_costmap_recovery/ClearCostmapRecovery"
+ speak_and_wait0:
+ speak_text: "I'm clearing costmap."
+ duration_wait: 5.0
+ duration_timeout: 1.0
+ sound_action: /sound_play
+ clear_costmap0:
+ reset_distance: 1.0
+```
+
+In this case, `speak_and_clear_costmap0` recovery runs `speak_and_wait0` recovery first, then runs `clear_costmap0`.
+So a robot speaks first and then clear its costmap.
+
+## complex_recovery/ParallelComplexRecovery
+
+* `~recovery_behaviors` (list of dictionaries which has `name` and `type` entries, default: None)
+
+Example configuration of `move_base` is like
+
+```yaml
+recovery_behavior_enabled: true
+recovery_behaviors:
+ - name: "speak_and_rotate_costmap0"
+ type: "complex_recovery/SequentialComplexRecovery"
+speak_and_rotate_costmap0:
+ recovery_behaviors:
+ - name: "speak_and_wait0"
+ type: "speak_and_wait_recovery/SpeakAndWaitRecovery"
+ - name: "rotate0"
+ type: "rotate_recovery/RotateRecovery"
+ speak_and_wait0:
+ speak_text: "I'm rotating."
+ duration_wait: 5.0
+ duration_timeout: 1.0
+ sound_action: /sound_play
+ rotate0:
+ sim_granularity: 0.017
+ frequency: 20.0
+```
+
+In this case, `speak_and_rotate_costmap0` recovery runs `speak_and_wait0` and `rotate0` simultaneously.
+So a robot speaks during its rotation.
diff --git a/jsk_robot_common/complex_recovery/complex_recovery_plugins.xml b/jsk_robot_common/complex_recovery/complex_recovery_plugins.xml
new file mode 100644
index 0000000000..52d7a4b4d5
--- /dev/null
+++ b/jsk_robot_common/complex_recovery/complex_recovery_plugins.xml
@@ -0,0 +1,18 @@
+
+
+
+ A recovery behavior that runs other recovery behaviors sequentially.
+
+
+
+
+ A recovery behavior that runs other recovery behaviors in parallel.
+
+
+
diff --git a/jsk_robot_common/complex_recovery/include/complex_recovery/parallel_complex_recovery.h b/jsk_robot_common/complex_recovery/include/complex_recovery/parallel_complex_recovery.h
new file mode 100644
index 0000000000..fc56d9c217
--- /dev/null
+++ b/jsk_robot_common/complex_recovery/include/complex_recovery/parallel_complex_recovery.h
@@ -0,0 +1,32 @@
+#ifndef COMPLEX_RECOVERY_H
+#define COMPLEX_RECOVERY_H
+
+#include
+#include
+#include
+#include
+
+namespace complex_recovery
+{
+
+class ParallelComplexRecovery : public nav_core::RecoveryBehavior
+{
+public:
+ ParallelComplexRecovery();
+ void initialize(
+ std::string name,
+ tf2_ros::Buffer* tf_buffer,
+ costmap_2d::Costmap2DROS* global_costmap,
+ costmap_2d::Costmap2DROS* local_costmap);
+ void runBehavior();
+ ~ParallelComplexRecovery();
+
+private:
+ bool initialized_;
+ std::vector > recovery_behaviors_;
+ std::vector recovery_behavior_names_;
+ pluginlib::ClassLoader recovery_loader_;
+};
+};
+
+#endif
diff --git a/jsk_robot_common/complex_recovery/include/complex_recovery/sequential_complex_recovery.h b/jsk_robot_common/complex_recovery/include/complex_recovery/sequential_complex_recovery.h
new file mode 100644
index 0000000000..507e0ea0ab
--- /dev/null
+++ b/jsk_robot_common/complex_recovery/include/complex_recovery/sequential_complex_recovery.h
@@ -0,0 +1,32 @@
+#ifndef COMPLEX_RECOVERY_H
+#define COMPLEX_RECOVERY_H
+
+#include
+#include
+#include
+#include
+
+namespace complex_recovery
+{
+
+class SequentialComplexRecovery : public nav_core::RecoveryBehavior
+{
+public:
+ SequentialComplexRecovery();
+ void initialize(
+ std::string name,
+ tf2_ros::Buffer*,
+ costmap_2d::Costmap2DROS* global_costmap,
+ costmap_2d::Costmap2DROS* local_costmap);
+ void runBehavior();
+ ~SequentialComplexRecovery();
+
+private:
+ bool initialized_;
+ std::vector > recovery_behaviors_;
+ std::vector recovery_behavior_names_;
+ pluginlib::ClassLoader recovery_loader_;
+};
+};
+
+#endif
diff --git a/jsk_robot_common/complex_recovery/include/complex_recovery/utils.h b/jsk_robot_common/complex_recovery/include/complex_recovery/utils.h
new file mode 100644
index 0000000000..a02ee51eec
--- /dev/null
+++ b/jsk_robot_common/complex_recovery/include/complex_recovery/utils.h
@@ -0,0 +1,21 @@
+#include
+#include
+#include
+#include
+#include
+
+namespace complex_recovery
+{
+
+
+bool loadRecoveryBehaviors(
+ std::string parent_name,
+ ros::NodeHandle& node,
+ pluginlib::ClassLoader& recovery_loader,
+ std::vector >& recovery_behaviors,
+ std::vector& recovery_behavior_names,
+ tf2_ros::Buffer* ptr_tf_buffer,
+ costmap_2d::Costmap2DROS* ptr_global_costmap,
+ costmap_2d::Costmap2DROS* ptr_local_costmap
+ );
+};
diff --git a/jsk_robot_common/complex_recovery/package.xml b/jsk_robot_common/complex_recovery/package.xml
new file mode 100644
index 0000000000..1892a9fc61
--- /dev/null
+++ b/jsk_robot_common/complex_recovery/package.xml
@@ -0,0 +1,30 @@
+
+
+ complex_recovery
+ 1.1.0
+ The complex_recovery package
+
+ Koki Shinjo
+ Kei Okada
+ Koki Shinjo
+
+ BSD
+
+
+ catkin
+
+ costmap_2d
+ nav_core
+ pluginlib
+ roscpp
+ tf2
+ tf2_ros
+
+ rostest
+ speak_and_wait_recovery
+ sound_play
+
+
+
+
+
diff --git a/jsk_robot_common/complex_recovery/src/parallel_complex_recovery.cpp b/jsk_robot_common/complex_recovery/src/parallel_complex_recovery.cpp
new file mode 100644
index 0000000000..80425e0f1b
--- /dev/null
+++ b/jsk_robot_common/complex_recovery/src/parallel_complex_recovery.cpp
@@ -0,0 +1,84 @@
+#include
+#include
+#include
+#include
+
+PLUGINLIB_EXPORT_CLASS(complex_recovery::ParallelComplexRecovery, nav_core::RecoveryBehavior)
+
+namespace complex_recovery
+{
+
+ParallelComplexRecovery::ParallelComplexRecovery():
+ initialized_(false),
+ recovery_loader_("nav_core", "nav_core::RecoveryBehavior")
+{
+}
+
+void ParallelComplexRecovery::initialize(
+ std::string name,
+ tf2_ros::Buffer* tf_buffer,
+ costmap_2d::Costmap2DROS* global_costmap,
+ costmap_2d::Costmap2DROS* local_costmap)
+{
+ if (not initialized_) {
+ ros::NodeHandle private_nh("~/" + name);
+ bool success = loadRecoveryBehaviors(
+ name,
+ private_nh,
+ recovery_loader_,
+ recovery_behaviors_,
+ recovery_behavior_names_,
+ tf_buffer,
+ global_costmap,
+ local_costmap
+ );
+ if ( not success ) {
+ ROS_ERROR("Failed to load behaviors.");
+ } else {
+ ROS_INFO("Behaviors are loaded.");
+ for (auto behavior_name = recovery_behavior_names_.begin(); behavior_name != recovery_behavior_names_.end(); behavior_name++) {
+ ROS_INFO("behavior: %s", behavior_name->c_str());
+ }
+ }
+
+ initialized_ = true;
+ } else {
+ ROS_ERROR("You should not call initialize twice on this object, doing nothing");
+ }
+}
+
+ParallelComplexRecovery::~ParallelComplexRecovery()
+{
+ recovery_behaviors_.clear();
+}
+
+void ParallelComplexRecovery::runBehavior()
+{
+ if (not initialized_)
+ {
+ ROS_ERROR("This object must be initialized before runBehavior is called");
+ return;
+ }
+
+ std::vector> threads;
+
+ ROS_INFO("Start executing behaviors in parallel.");
+ for (auto index = 0; index < recovery_behaviors_.size(); index++) {
+ ROS_INFO("start executing behavior %s", recovery_behavior_names_[index].c_str());
+ threads.push_back(
+ std::shared_ptr(
+ new std::thread(
+ &nav_core::RecoveryBehavior::runBehavior,
+ recovery_behaviors_[index]
+ )));
+ }
+
+ ROS_INFO("Waiting for behaviors to finish.");
+ for (auto thread = threads.begin(); thread != threads.end(); thread++) {
+ (*thread)->join();
+ }
+
+ ROS_INFO("All behaviors have finished.");
+}
+
+};
diff --git a/jsk_robot_common/complex_recovery/src/sequential_complex_recovery.cpp b/jsk_robot_common/complex_recovery/src/sequential_complex_recovery.cpp
new file mode 100644
index 0000000000..4a71196ea1
--- /dev/null
+++ b/jsk_robot_common/complex_recovery/src/sequential_complex_recovery.cpp
@@ -0,0 +1,71 @@
+#include
+#include
+#include
+
+PLUGINLIB_EXPORT_CLASS(complex_recovery::SequentialComplexRecovery, nav_core::RecoveryBehavior)
+
+namespace complex_recovery
+{
+
+SequentialComplexRecovery::SequentialComplexRecovery():
+ initialized_(false),
+ recovery_loader_("nav_core", "nav_core::RecoveryBehavior")
+{
+}
+
+void SequentialComplexRecovery::initialize(
+ std::string name,
+ tf2_ros::Buffer* tf_buffer,
+ costmap_2d::Costmap2DROS* global_costmap,
+ costmap_2d::Costmap2DROS* local_costmap)
+{
+ if (not initialized_) {
+ ros::NodeHandle private_nh("~/" + name);
+ bool success = loadRecoveryBehaviors(
+ name,
+ private_nh,
+ recovery_loader_,
+ recovery_behaviors_,
+ recovery_behavior_names_,
+ tf_buffer,
+ global_costmap,
+ local_costmap
+ );
+ if ( not success ) {
+ ROS_ERROR("Failed to load behaviors.");
+ } else {
+ ROS_INFO("Behaviors are loaded.");
+ for (auto behavior_name = recovery_behavior_names_.begin(); behavior_name != recovery_behavior_names_.end(); behavior_name++) {
+ ROS_INFO("behavior: %s", behavior_name->c_str());
+ }
+ }
+
+ initialized_ = true;
+ } else {
+ ROS_ERROR("You should not call initialize twice on this object, doing nothing");
+ }
+}
+
+SequentialComplexRecovery::~SequentialComplexRecovery()
+{
+ recovery_behaviors_.clear();
+}
+
+void SequentialComplexRecovery::runBehavior()
+{
+ if (not initialized_)
+ {
+ ROS_ERROR("This object must be initialized before runBehavior is called");
+ return;
+ }
+
+ ROS_INFO("Start executing behaviors sequentially.");
+ for (auto index = 0; index < recovery_behaviors_.size(); index++) {
+ ROS_INFO("executing behavior %s", recovery_behavior_names_[index].c_str());
+ recovery_behaviors_[index]->runBehavior();
+ }
+
+ ROS_INFO("All behaviors have finished.");
+}
+
+};
diff --git a/jsk_robot_common/complex_recovery/src/utils.cpp b/jsk_robot_common/complex_recovery/src/utils.cpp
new file mode 100644
index 0000000000..660d91007f
--- /dev/null
+++ b/jsk_robot_common/complex_recovery/src/utils.cpp
@@ -0,0 +1,108 @@
+#include
+
+namespace complex_recovery
+{
+
+/**
+ *
+ * Almost copied from https://github.com/ros-planning/navigation/blob/47c9c629fc93e6c6bbcd3109eb2d5b55efce400d/move_base/src/move_base.cpp#L1019-L1102
+ */
+bool loadRecoveryBehaviors(
+ std::string parent_name,
+ ros::NodeHandle& node,
+ pluginlib::ClassLoader& recovery_loader,
+ std::vector >& recovery_behaviors,
+ std::vector& recovery_behavior_names,
+ tf2_ros::Buffer* ptr_tf_buffer,
+ costmap_2d::Costmap2DROS* ptr_global_costmap,
+ costmap_2d::Costmap2DROS* ptr_local_costmap
+ )
+{
+ XmlRpc::XmlRpcValue behavior_list;
+ if(node.getParam("recovery_behaviors", behavior_list)){
+ if(behavior_list.getType() == XmlRpc::XmlRpcValue::TypeArray){
+ for(int i = 0; i < behavior_list.size(); ++i){
+ if(behavior_list[i].getType() == XmlRpc::XmlRpcValue::TypeStruct){
+ if(behavior_list[i].hasMember("name") && behavior_list[i].hasMember("type")){
+ //check for recovery behaviors with the same name
+ for(int j = i + 1; j < behavior_list.size(); j++){
+ if(behavior_list[j].getType() == XmlRpc::XmlRpcValue::TypeStruct){
+ if(behavior_list[j].hasMember("name") && behavior_list[j].hasMember("type")){
+ std::string name_i = behavior_list[i]["name"];
+ std::string name_j = behavior_list[j]["name"];
+ if(name_i == name_j){
+ ROS_ERROR("A recovery behavior with the name %s already exists, this is not allowed. Using the default recovery behaviors instead.",
+ name_i.c_str());
+ return false;
+ }
+ }
+ }
+ }
+ }
+ else{
+ ROS_ERROR("Recovery behaviors must have a name and a type and this does not. Using the default recovery behaviors instead.");
+ return false;
+ }
+ }
+ else{
+ ROS_ERROR("Recovery behaviors must be specified as maps, but they are XmlRpcType %d. We'll use the default recovery behaviors instead.",
+ behavior_list[i].getType());
+ return false;
+ }
+ }
+
+ //if we've made it to this point, we know that the list is legal so we'll create all the recovery behaviors
+ for(int i = 0; i < behavior_list.size(); ++i){
+ try{
+ //check if a non fully qualified name has potentially been passed in
+ if(!recovery_loader.isClassAvailable(behavior_list[i]["type"])){
+ std::vector classes = recovery_loader.getDeclaredClasses();
+ for(unsigned int i = 0; i < classes.size(); ++i){
+ if(behavior_list[i]["type"] == recovery_loader.getName(classes[i])){
+ //if we've found a match... we'll get the fully qualified name and break out of the loop
+ ROS_WARN("Recovery behavior specifications should now include the package name. You are using a deprecated API. Please switch from %s to %s in your yaml file.",
+ std::string(behavior_list[i]["type"]).c_str(), classes[i].c_str());
+ behavior_list[i]["type"] = classes[i];
+ break;
+ }
+ }
+ }
+
+ boost::shared_ptr behavior(recovery_loader.createInstance(behavior_list[i]["type"]));
+
+ //shouldn't be possible, but it won't hurt to check
+ if(behavior.get() == NULL){
+ ROS_ERROR("The ClassLoader returned a null pointer without throwing an exception. This should not happen");
+ return false;
+ }
+
+ //initialize the recovery behavior with its name
+ std::string base_name = behavior_list[i]["name"];
+ behavior->initialize(
+ parent_name + "/" + base_name,
+ ptr_tf_buffer, ptr_global_costmap, ptr_local_costmap);
+ recovery_behavior_names.push_back(behavior_list[i]["name"]);
+ recovery_behaviors.push_back(behavior);
+ }
+ catch(pluginlib::PluginlibException& ex){
+ ROS_ERROR("Failed to load a plugin. Using default recovery behaviors. Error: %s", ex.what());
+ return false;
+ }
+ }
+ }
+ else{
+ ROS_ERROR("The recovery behavior specification must be a list, but is of XmlRpcType %d. We'll use the default recovery behaviors instead.",
+ behavior_list.getType());
+ return false;
+ }
+ }
+ else{
+ //if no recovery_behaviors are specified, we'll just load the defaults
+ return false;
+ }
+
+ //if we've made it here... we've constructed a recovery behavior list successfully
+ return true;
+}
+
+};
diff --git a/jsk_robot_common/complex_recovery/tests/parallel_complex_recovery.test b/jsk_robot_common/complex_recovery/tests/parallel_complex_recovery.test
new file mode 100644
index 0000000000..17dc02c20c
--- /dev/null
+++ b/jsk_robot_common/complex_recovery/tests/parallel_complex_recovery.test
@@ -0,0 +1,56 @@
+
+
+
+ recovery:
+ recovery_behaviors:
+ - name: 'wait_and_speak_complex0'
+ type: 'complex_recovery/SequentialComplexRecovery'
+ - name: 'wait_and_speak_complex1'
+ type: 'complex_recovery/SequentialComplexRecovery'
+ wait_and_speak_complex0:
+ recovery_behaviors:
+ - name: 'wait_3_secs'
+ type: 'speak_and_wait_recovery/SpeakAndWaitRecovery'
+ - name: 'speak_and_wait0'
+ type: 'speak_and_wait_recovery/SpeakAndWaitRecovery'
+ wait_3_secs:
+ speak_text: ''
+ duration_wait: 3.0
+ duration_timeout: 2.0
+ result_timeout: 1.0
+ speak_and_wait0:
+ speak_text: 'test0'
+ duration_wait: 2.0
+ duration_timeout: 2.0
+ result_timeout: 1.0
+ wait_and_speak_complex1:
+ recovery_behaviors:
+ - name: 'wait_5_secs'
+ type: 'speak_and_wait_recovery/SpeakAndWaitRecovery'
+ - name: 'speak_and_wait1'
+ type: 'speak_and_wait_recovery/SpeakAndWaitRecovery'
+ wait_5_secs:
+ speak_text: ''
+ duration_wait: 5.0
+ duration_timeout: 2.0
+ result_timeout: 1.0
+ speak_and_wait1:
+ speak_text: 'test1'
+ duration_wait: 2.0
+ duration_timeout: 2.0
+ result_timeout: 1.0
+
+
+
+
+
diff --git a/jsk_robot_common/complex_recovery/tests/parallel_complex_recovery_test_node.cpp b/jsk_robot_common/complex_recovery/tests/parallel_complex_recovery_test_node.cpp
new file mode 100644
index 0000000000..3d54f9cad7
--- /dev/null
+++ b/jsk_robot_common/complex_recovery/tests/parallel_complex_recovery_test_node.cpp
@@ -0,0 +1,21 @@
+#include
+#include "complex_recovery/parallel_complex_recovery.h"
+
+int main(int argc, char **argv)
+{
+ ros::init(argc, argv, "complex_recovery_simple_node");
+ ros::NodeHandle nh;
+
+ complex_recovery::ParallelComplexRecovery recovery;
+ recovery.initialize(std::string("recovery"),NULL,NULL,NULL);
+
+ ros::Rate rate(10);
+ while (ros::ok()) {
+ ROS_WARN("Spoken a test");
+ recovery.runBehavior();
+ ros::spinOnce();
+ rate.sleep();
+ }
+
+ return 0;
+}
diff --git a/jsk_robot_common/complex_recovery/tests/sequential_complex_recovery.test b/jsk_robot_common/complex_recovery/tests/sequential_complex_recovery.test
new file mode 100644
index 0000000000..78bfd748f2
--- /dev/null
+++ b/jsk_robot_common/complex_recovery/tests/sequential_complex_recovery.test
@@ -0,0 +1,34 @@
+
+
+
+ recovery:
+ recovery_behaviors:
+ - name: 'speak_and_wait0'
+ type: 'speak_and_wait_recovery/SpeakAndWaitRecovery'
+ - name: 'speak_and_wait1'
+ type: 'speak_and_wait_recovery/SpeakAndWaitRecovery'
+ speak_and_wait0:
+ speak_text: 'test0'
+ duration_wait: 2.0
+ duration_timeout: 2.0
+ result_timeout: 1.0
+ speak_and_wait1:
+ speak_text: 'test1'
+ duration_wait: 2.0
+ duration_timeout: 2.0
+ result_timeout: 1.0
+
+
+
+
+
diff --git a/jsk_robot_common/complex_recovery/tests/sequential_complex_recovery_test_node.cpp b/jsk_robot_common/complex_recovery/tests/sequential_complex_recovery_test_node.cpp
new file mode 100644
index 0000000000..618ff5656c
--- /dev/null
+++ b/jsk_robot_common/complex_recovery/tests/sequential_complex_recovery_test_node.cpp
@@ -0,0 +1,21 @@
+#include
+#include "complex_recovery/sequential_complex_recovery.h"
+
+int main(int argc, char **argv)
+{
+ ros::init(argc, argv, "complex_recovery_simple_node");
+ ros::NodeHandle nh;
+
+ complex_recovery::SequentialComplexRecovery recovery;
+ recovery.initialize(std::string("recovery"),NULL,NULL,NULL);
+
+ ros::Rate rate(10);
+ while (ros::ok()) {
+ ROS_WARN("Spoken a test");
+ recovery.runBehavior();
+ ros::spinOnce();
+ rate.sleep();
+ }
+
+ return 0;
+}
diff --git a/jsk_robot_common/complex_recovery/tests/test_parallel_complex_recovery.py b/jsk_robot_common/complex_recovery/tests/test_parallel_complex_recovery.py
new file mode 100755
index 0000000000..8d7fea0de8
--- /dev/null
+++ b/jsk_robot_common/complex_recovery/tests/test_parallel_complex_recovery.py
@@ -0,0 +1,55 @@
+#!/usr/bin/env python
+
+from sound_play.msg import SoundRequestResult
+from sound_play.msg import SoundRequestAction
+import rospy
+import actionlib
+import threading
+import sys
+import unittest
+import rostest
+
+PKG = 'complex_recovery'
+NAME = 'parallel_complex_recovery_test'
+
+
+class TestParallelComplexRecovery(unittest.TestCase):
+
+ def __init__(self, *args):
+ super(self.__class__, self).__init__(*args)
+ rospy.init_node(NAME)
+
+ self.lock_for_msg = threading.Lock()
+ self.speech_text_list = []
+
+ self.action_server = \
+ actionlib.SimpleActionServer(
+ '/sound_play', SoundRequestAction, execute_cb=self.handler, auto_start=False)
+ self.action_server.start()
+
+ def handler(self, goal):
+
+ with self.lock_for_msg:
+ self.speech_text_list.append(goal.sound_request.arg)
+ rospy.logwarn('Receive a message')
+ self.action_server.set_succeeded(
+ SoundRequestResult(playing=True, stamp=rospy.Time.now()))
+
+ def test_parallel_complex_recovery(self):
+
+ rate = rospy.Rate(1)
+ while not rospy.is_shutdown():
+ with self.lock_for_msg:
+ if 'test0' in self.speech_text_list and 'test1' in self.speech_text_list:
+ break
+ else:
+ rospy.logwarn('waiting')
+ rate.sleep()
+
+ with self.lock_for_msg:
+ rospy.logwarn('speech_text_list: {}'.format(self.speech_text_list))
+ self.assertTrue('test0' in self.speech_text_list and 'test1' in self.speech_text_list)
+
+
+if __name__ == '__main__':
+ rostest.rosrun(PKG, NAME, TestParallelComplexRecovery, sys.argv)
diff --git a/jsk_robot_common/complex_recovery/tests/test_sequential_complex_recovery.py b/jsk_robot_common/complex_recovery/tests/test_sequential_complex_recovery.py
new file mode 100755
index 0000000000..4dce3752b1
--- /dev/null
+++ b/jsk_robot_common/complex_recovery/tests/test_sequential_complex_recovery.py
@@ -0,0 +1,55 @@
+#!/usr/bin/env python
+
+from sound_play.msg import SoundRequestResult
+from sound_play.msg import SoundRequestAction
+import rospy
+import actionlib
+import threading
+import sys
+import unittest
+import rostest
+
+PKG = 'complex_recovery'
+NAME = 'sequential_complex_recovery_test'
+
+
+class TestSequentialComplexRecovery(unittest.TestCase):
+
+ def __init__(self, *args):
+ super(self.__class__, self).__init__(*args)
+ rospy.init_node(NAME)
+
+ self.lock_for_msg = threading.Lock()
+ self.speech_text_list = []
+
+ self.action_server = \
+ actionlib.SimpleActionServer(
+ '/sound_play', SoundRequestAction, execute_cb=self.handler, auto_start=False)
+ self.action_server.start()
+
+ def handler(self, goal):
+
+ with self.lock_for_msg:
+ self.speech_text_list.append(goal.sound_request.arg)
+ rospy.logwarn('Receive a message')
+ self.action_server.set_succeeded(
+ SoundRequestResult(playing=True, stamp=rospy.Time.now()))
+
+ def test_sequential_complex_recovery(self):
+
+ rate = rospy.Rate(1)
+ while not rospy.is_shutdown():
+ with self.lock_for_msg:
+ if 'test0' in self.speech_text_list and 'test1' in self.speech_text_list:
+ break
+ else:
+ rospy.logwarn('waiting')
+ rate.sleep()
+
+ with self.lock_for_msg:
+ rospy.logwarn('speech_text_list: {}'.format(self.speech_text_list))
+ self.assertTrue('test0' in self.speech_text_list and 'test1' in self.speech_text_list)
+
+
+if __name__ == '__main__':
+ rostest.rosrun(PKG, NAME, TestSequentialComplexRecovery, sys.argv)
diff --git a/jsk_robot_common/jsk_robot_startup/apps/robot_apps.installed b/jsk_robot_common/jsk_robot_startup/apps/robot_apps.installed
index e142d9282c..1350da5b19 100644
--- a/jsk_robot_common/jsk_robot_startup/apps/robot_apps.installed
+++ b/jsk_robot_common/jsk_robot_startup/apps/robot_apps.installed
@@ -1,5 +1,15 @@
apps:
- app: jsk_robot_startup/personal_use
- display: Personal use
+ display: Personal use
- app: jsk_robot_startup/check_use_sim_time
display: Check /use_sim_time param
+ - app: jsk_robot_startup/roseus_resume_interrupt
+ display: Interrupt
+ - app: jsk_robot_startup/roseus_resume_resume
+ display: Resume
+ - app: jsk_robot_startup/volume_lower
+ display: Volume lower
+ - app: jsk_robot_startup/volume_reset
+ display: Volume reset
+ - app: jsk_robot_startup/volume_zero
+ display: Volume zero
diff --git a/jsk_robot_common/jsk_robot_startup/apps/roseus_resume_interrupt/roseus_resume_interrupt.app b/jsk_robot_common/jsk_robot_startup/apps/roseus_resume_interrupt/roseus_resume_interrupt.app
new file mode 100644
index 0000000000..d6ea2dad0f
--- /dev/null
+++ b/jsk_robot_common/jsk_robot_startup/apps/roseus_resume_interrupt/roseus_resume_interrupt.app
@@ -0,0 +1,6 @@
+display: Interrupt
+platform: all
+run: rostopic/rostopic
+run_args: "pub -1 /roseus_resume/interrupt std_msgs/Empty"
+interface: jsk_robot_startup/roseus_resume_interrupt.interface
+icon: jsk_robot_startup/roseus_resume_interrupt.png
diff --git a/jsk_robot_common/jsk_robot_startup/apps/roseus_resume_interrupt/roseus_resume_interrupt.interface b/jsk_robot_common/jsk_robot_startup/apps/roseus_resume_interrupt/roseus_resume_interrupt.interface
new file mode 100644
index 0000000000..044105d644
--- /dev/null
+++ b/jsk_robot_common/jsk_robot_startup/apps/roseus_resume_interrupt/roseus_resume_interrupt.interface
@@ -0,0 +1,2 @@
+published_topics: {}
+subscribed_topics: {}
diff --git a/jsk_robot_common/jsk_robot_startup/apps/roseus_resume_interrupt/roseus_resume_interrupt.png b/jsk_robot_common/jsk_robot_startup/apps/roseus_resume_interrupt/roseus_resume_interrupt.png
new file mode 100644
index 0000000000..352d08ee47
Binary files /dev/null and b/jsk_robot_common/jsk_robot_startup/apps/roseus_resume_interrupt/roseus_resume_interrupt.png differ
diff --git a/jsk_robot_common/jsk_robot_startup/apps/roseus_resume_resume/roseus_resume_resume.app b/jsk_robot_common/jsk_robot_startup/apps/roseus_resume_resume/roseus_resume_resume.app
new file mode 100644
index 0000000000..c21b0d3a49
--- /dev/null
+++ b/jsk_robot_common/jsk_robot_startup/apps/roseus_resume_resume/roseus_resume_resume.app
@@ -0,0 +1,6 @@
+display: Resume
+platform: all
+run: rostopic/rostopic
+run_args: "pub -1 /roseus_resume/resume std_msgs/Empty"
+interface: jsk_robot_startup/roseus_resume_resume.interface
+icon: jsk_robot_startup/roseus_resume_resume.png
diff --git a/jsk_robot_common/jsk_robot_startup/apps/roseus_resume_resume/roseus_resume_resume.interface b/jsk_robot_common/jsk_robot_startup/apps/roseus_resume_resume/roseus_resume_resume.interface
new file mode 100644
index 0000000000..044105d644
--- /dev/null
+++ b/jsk_robot_common/jsk_robot_startup/apps/roseus_resume_resume/roseus_resume_resume.interface
@@ -0,0 +1,2 @@
+published_topics: {}
+subscribed_topics: {}
diff --git a/jsk_robot_common/jsk_robot_startup/apps/roseus_resume_resume/roseus_resume_resume.png b/jsk_robot_common/jsk_robot_startup/apps/roseus_resume_resume/roseus_resume_resume.png
new file mode 100644
index 0000000000..235869778e
Binary files /dev/null and b/jsk_robot_common/jsk_robot_startup/apps/roseus_resume_resume/roseus_resume_resume.png differ
diff --git a/jsk_robot_common/jsk_robot_startup/apps/volume_lower/volume_lower.app b/jsk_robot_common/jsk_robot_startup/apps/volume_lower/volume_lower.app
new file mode 100644
index 0000000000..e9648c034f
--- /dev/null
+++ b/jsk_robot_common/jsk_robot_startup/apps/volume_lower/volume_lower.app
@@ -0,0 +1,6 @@
+display: Volume Lower
+description: robot speaks lower volume
+platform: all
+run: jsk_robot_startup/auto_speak_volume_lower.l
+interface: jsk_robot_startup/volume_lower.interface
+icon: jsk_robot_startup/volume_lower.png
\ No newline at end of file
diff --git a/jsk_robot_common/jsk_robot_startup/apps/volume_lower/volume_lower.interface b/jsk_robot_common/jsk_robot_startup/apps/volume_lower/volume_lower.interface
new file mode 100644
index 0000000000..5cb4ae9816
--- /dev/null
+++ b/jsk_robot_common/jsk_robot_startup/apps/volume_lower/volume_lower.interface
@@ -0,0 +1,2 @@
+published_topics: {}
+subscribed_topics: {}
\ No newline at end of file
diff --git a/jsk_robot_common/jsk_robot_startup/apps/volume_lower/volume_lower.png b/jsk_robot_common/jsk_robot_startup/apps/volume_lower/volume_lower.png
new file mode 100644
index 0000000000..d79825e859
Binary files /dev/null and b/jsk_robot_common/jsk_robot_startup/apps/volume_lower/volume_lower.png differ
diff --git a/jsk_robot_common/jsk_robot_startup/apps/volume_reset/volume_reset.app b/jsk_robot_common/jsk_robot_startup/apps/volume_reset/volume_reset.app
new file mode 100644
index 0000000000..9b71b6cfb6
--- /dev/null
+++ b/jsk_robot_common/jsk_robot_startup/apps/volume_reset/volume_reset.app
@@ -0,0 +1,6 @@
+display: Volume Reset
+description: robot speaks reset volume
+platform: all
+run: jsk_robot_startup/auto_speak_volume_reset.l
+interface: jsk_robot_startup/volume_reset.interface
+icon: jsk_robot_startup/volume_reset.png
\ No newline at end of file
diff --git a/jsk_robot_common/jsk_robot_startup/apps/volume_reset/volume_reset.interface b/jsk_robot_common/jsk_robot_startup/apps/volume_reset/volume_reset.interface
new file mode 100644
index 0000000000..5cb4ae9816
--- /dev/null
+++ b/jsk_robot_common/jsk_robot_startup/apps/volume_reset/volume_reset.interface
@@ -0,0 +1,2 @@
+published_topics: {}
+subscribed_topics: {}
\ No newline at end of file
diff --git a/jsk_robot_common/jsk_robot_startup/apps/volume_reset/volume_reset.png b/jsk_robot_common/jsk_robot_startup/apps/volume_reset/volume_reset.png
new file mode 100644
index 0000000000..d9dbfbc14f
Binary files /dev/null and b/jsk_robot_common/jsk_robot_startup/apps/volume_reset/volume_reset.png differ
diff --git a/jsk_robot_common/jsk_robot_startup/apps/volume_zero/volume_zero.app b/jsk_robot_common/jsk_robot_startup/apps/volume_zero/volume_zero.app
new file mode 100644
index 0000000000..99cc7aecb2
--- /dev/null
+++ b/jsk_robot_common/jsk_robot_startup/apps/volume_zero/volume_zero.app
@@ -0,0 +1,6 @@
+display: Volume Zero
+description: robot speaks zero volume
+platform: all
+run: jsk_robot_startup/auto_speak_volume_zero.l
+interface: jsk_robot_startup/volume_zero.interface
+icon: jsk_robot_startup/volume_zero.png
\ No newline at end of file
diff --git a/jsk_robot_common/jsk_robot_startup/apps/volume_zero/volume_zero.interface b/jsk_robot_common/jsk_robot_startup/apps/volume_zero/volume_zero.interface
new file mode 100644
index 0000000000..5cb4ae9816
--- /dev/null
+++ b/jsk_robot_common/jsk_robot_startup/apps/volume_zero/volume_zero.interface
@@ -0,0 +1,2 @@
+published_topics: {}
+subscribed_topics: {}
\ No newline at end of file
diff --git a/jsk_robot_common/jsk_robot_startup/apps/volume_zero/volume_zero.png b/jsk_robot_common/jsk_robot_startup/apps/volume_zero/volume_zero.png
new file mode 100644
index 0000000000..cb736a528e
Binary files /dev/null and b/jsk_robot_common/jsk_robot_startup/apps/volume_zero/volume_zero.png differ
diff --git a/jsk_robot_common/jsk_robot_startup/launch/interaction.launch b/jsk_robot_common/jsk_robot_startup/launch/interaction.launch
new file mode 100644
index 0000000000..0b3487d7c2
--- /dev/null
+++ b/jsk_robot_common/jsk_robot_startup/launch/interaction.launch
@@ -0,0 +1,56 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_robot_common/jsk_robot_startup/launch/lifelog.launch b/jsk_robot_common/jsk_robot_startup/launch/lifelog.launch
new file mode 100644
index 0000000000..ee310515ba
--- /dev/null
+++ b/jsk_robot_common/jsk_robot_startup/launch/lifelog.launch
@@ -0,0 +1,147 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ approximate_sync: true
+ topics:
+ - /publish_trigger_mongodb_event
+ - $(arg image)/compressed
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_robot_common/jsk_robot_startup/launch/sample_database_talker.launch b/jsk_robot_common/jsk_robot_startup/launch/sample_database_talker.launch
new file mode 100644
index 0000000000..6313364c0d
--- /dev/null
+++ b/jsk_robot_common/jsk_robot_startup/launch/sample_database_talker.launch
@@ -0,0 +1,26 @@
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
diff --git a/jsk_robot_common/jsk_robot_startup/lifelog/app_manager.launch b/jsk_robot_common/jsk_robot_startup/lifelog/app_manager.launch
index f1f90dc1e3..1e7a5be105 100644
--- a/jsk_robot_common/jsk_robot_startup/lifelog/app_manager.launch
+++ b/jsk_robot_common/jsk_robot_startup/lifelog/app_manager.launch
@@ -2,6 +2,8 @@
+
+
@@ -44,6 +46,7 @@
delay_between_messages: 0
max_message_size: None
fragment_timeout: 600
+ unregister_timeout: 100000000
+
+
diff --git a/jsk_robot_common/jsk_robot_startup/lifelog/auto_speak_volume_lower.l b/jsk_robot_common/jsk_robot_startup/lifelog/auto_speak_volume_lower.l
new file mode 100755
index 0000000000..6696fe3f16
--- /dev/null
+++ b/jsk_robot_common/jsk_robot_startup/lifelog/auto_speak_volume_lower.l
@@ -0,0 +1,15 @@
+#!/usr/bin/env roseus
+
+(ros::roseus "speak_volume_lower")
+(ros::set-dynamic-reconfigure-param "/audible_warning" "enable" :bool t)
+(ros::set-dynamic-reconfigure-param "/tweet_client_tablet" "speak_enable" :bool t)
+(ros::set-dynamic-reconfigure-param "/tweet_client_uptime" "speak_enable" :bool t)
+(ros::set-dynamic-reconfigure-param "/tweet_client_warning" "speak_enable" :bool t)
+(ros::set-dynamic-reconfigure-param "/tweet_client_worktime" "speak_enable" :bool t)
+(ros::set-dynamic-reconfigure-param "/audible_warning" "volume" :double 0.2)
+(ros::set-dynamic-reconfigure-param "/tweet_client_tablet" "volume" :double 0.2)
+(ros::set-dynamic-reconfigure-param "/tweet_client_uptime" "volume" :double 0.2)
+(ros::set-dynamic-reconfigure-param "/tweet_client_warning" "volume" :double 0.2)
+(ros::set-dynamic-reconfigure-param "/tweet_client_worktime" "volume" :double 0.2)
+(ros::set-dynamic-reconfigure-param "/time_signal" "volume" :double 0.2)
+(exit)
diff --git a/jsk_robot_common/jsk_robot_startup/lifelog/auto_speak_volume_reset.l b/jsk_robot_common/jsk_robot_startup/lifelog/auto_speak_volume_reset.l
new file mode 100755
index 0000000000..315e9151af
--- /dev/null
+++ b/jsk_robot_common/jsk_robot_startup/lifelog/auto_speak_volume_reset.l
@@ -0,0 +1,15 @@
+#!/usr/bin/env roseus
+
+(ros::roseus "speak_volume_reset")
+(ros::set-dynamic-reconfigure-param "/audible_warning" "enable" :bool t)
+(ros::set-dynamic-reconfigure-param "/tweet_client_tablet" "speak_enable" :bool t)
+(ros::set-dynamic-reconfigure-param "/tweet_client_uptime" "speak_enable" :bool t)
+(ros::set-dynamic-reconfigure-param "/tweet_client_warning" "speak_enable" :bool t)
+(ros::set-dynamic-reconfigure-param "/tweet_client_worktime" "speak_enable" :bool t)
+(ros::set-dynamic-reconfigure-param "/audible_warning" "volume" :double 1.0)
+(ros::set-dynamic-reconfigure-param "/tweet_client_tablet" "volume" :double 1.0)
+(ros::set-dynamic-reconfigure-param "/tweet_client_uptime" "volume" :double 1.0)
+(ros::set-dynamic-reconfigure-param "/tweet_client_warning" "volume" :double 1.0)
+(ros::set-dynamic-reconfigure-param "/tweet_client_worktime" "volume" :double 1.0)
+(ros::set-dynamic-reconfigure-param "/time_signal" "volume" :double 1.0)
+(exit)
diff --git a/jsk_robot_common/jsk_robot_startup/lifelog/auto_speak_volume_zero.l b/jsk_robot_common/jsk_robot_startup/lifelog/auto_speak_volume_zero.l
new file mode 100755
index 0000000000..39c58b530e
--- /dev/null
+++ b/jsk_robot_common/jsk_robot_startup/lifelog/auto_speak_volume_zero.l
@@ -0,0 +1,15 @@
+#!/usr/bin/env roseus
+
+(ros::roseus "speak_volume_zero")
+(ros::set-dynamic-reconfigure-param "/audible_warning" "enable" :bool nil)
+(ros::set-dynamic-reconfigure-param "/tweet_client_tablet" "speak_enable" :bool nil)
+(ros::set-dynamic-reconfigure-param "/tweet_client_uptime" "speak_enable" :bool nil)
+(ros::set-dynamic-reconfigure-param "/tweet_client_warning" "speak_enable" :bool nil)
+(ros::set-dynamic-reconfigure-param "/tweet_client_worktime" "speak_enable" :bool nil)
+(ros::set-dynamic-reconfigure-param "/audible_warning" "volume" :double 0.0)
+(ros::set-dynamic-reconfigure-param "/tweet_client_tablet" "volume" :double 0.0)
+(ros::set-dynamic-reconfigure-param "/tweet_client_uptime" "volume" :double 0.0)
+(ros::set-dynamic-reconfigure-param "/tweet_client_warning" "volume" :double 0.0)
+(ros::set-dynamic-reconfigure-param "/tweet_client_worktime" "volume" :double 0.0)
+(ros::set-dynamic-reconfigure-param "/time_signal" "volume" :double 0.0)
+(exit)
diff --git a/jsk_robot_common/jsk_robot_startup/lifelog/common_logger.launch b/jsk_robot_common/jsk_robot_startup/lifelog/common_logger.launch
index b99511f06d..9af0e43968 100644
--- a/jsk_robot_common/jsk_robot_startup/lifelog/common_logger.launch
+++ b/jsk_robot_common/jsk_robot_startup/lifelog/common_logger.launch
@@ -1,4 +1,8 @@
+
+
+
+
@@ -11,6 +15,8 @@
+
+
@@ -36,8 +42,9 @@
+
-
+
@@ -56,7 +63,7 @@
pkg="nodelet" type="nodelet" args="manager" machine="$(arg machine)"
output="screen" respawn="$(arg respawn)" launch-prefix="$(arg launch-prefix)"/>
-
+
@@ -135,10 +142,14 @@
respawn="$(arg respawn)">
+ database: $(arg database)
enable_monitor: $(arg enable_monitor)
monitor_topic: /$(arg camera_ns)/$(arg rgb_ns)/$(arg rgb_topic)
vital_check: $(arg vital_check)
+
+ collection: $(arg collection)
+
+ database: $(arg database)
enable_monitor: $(arg enable_monitor)
monitor_topic: /$(arg camera_ns)/$(arg rgb_ns)/$(arg rgb_topic)
vital_check: $(arg vital_check)
+
+ collection: $(arg collection)
+
@@ -161,10 +176,14 @@
respawn="$(arg respawn)">
+ database: $(arg database)
enable_monitor: $(arg enable_monitor)
monitor_topic: /$(arg camera_ns)/$(arg depth_ns)/$(arg depth_topic)
vital_check: $(arg vital_check)
+
+ collection: $(arg collection)
+
+ database: $(arg database)
enable_monitor: $(arg enable_monitor)
monitor_topic: /$(arg camera_ns)/$(arg depth_ns)/$(arg depth_topic)
vital_check: $(arg vital_check)
+
+ collection: $(arg collection)
+
@@ -187,8 +210,12 @@
respawn="$(arg respawn)"
if="$(arg save_tf)">
+ database: $(arg database)
update_rate: $(arg log_rate)
+
+ collection: $(arg collection)
+
@@ -199,8 +226,12 @@
respawn="$(arg respawn)">
+ database: $(arg database)
periodic_rate: $(arg log_rate)
+
+ collection: $(arg collection)
+
+ database: $(arg database)
enable_monitor: $(arg enable_monitor)
monitor_topic: /$(arg joint_states_topic)
vital_check: $(arg vital_check)
+
+ collection: $(arg collection)
+
@@ -221,11 +256,15 @@
machine="$(arg machine)"
respawn="$(arg respawn)">
+ database: $(arg database)
topics:
- /server_name/smach/container_init
- /server_name/smach/container_status
- /server_name/smach/container_structure
+
+ collection: $(arg collection)
+
+ database: $(arg database)
topics:
- /Tablet/voice
+
+ collection: $(arg collection)
+
@@ -246,10 +289,14 @@
machine="$(arg machine)"
respawn="$(arg respawn)">
+ database: $(arg database)
topics:
- /aws_auto_checkin_app/class
- /aws_detect_faces/attributes
+
+ collection: $(arg collection)
+
@@ -259,10 +306,14 @@
machine="$(arg machine)"
respawn="$(arg respawn)">
+ database: $(arg database)
topics:
- /dialogflow_client/text_action/goal
- /dialogflow_client/text_action/result
+
+ collection: $(arg collection)
+
@@ -288,21 +339,64 @@
machine="$(arg machine)"
respawn="$(arg respawn)">
+ database: $(arg database)
update_rate: $(arg log_rate)
map_frame: $(arg map_frame_id)
robot_frame: $(arg base_frame_id)
+
+ collection: $(arg collection)
+
-
+
+
+ database: $(arg database)
+ topics:
+ - /edgetpu_object_detector/output/class
+ - /edgetpu_object_detector/output/rects
+
+
+ collection: $(arg collection)
+
+
+
+
+ database: $(arg database)
+ map_frame: $(arg map_frame_id)
+ robot_frame: $(arg base_frame_id)
+
+
+ collection: $(arg collection)
+
+
+
+
+
+
- map_frame: $(arg map_frame_id)
- robot_frame: $(arg base_frame_id)
+ database: $(arg database)
+ topics:
+ - /edgetpu_human_pose_estimator/output/class
+ - /edgetpu_human_pose_estimator/output/poses
+ - /edgetpu_human_pose_estimator/output/rects
+
+
+ collection: $(arg collection)
@@ -311,7 +405,14 @@
name="action_logger"
pkg="jsk_robot_startup" type="action_logger.py"
machine="$(arg machine)"
- respawn="$(arg respawn)" />
+ respawn="$(arg respawn)">
+
+ database: $(arg database)
+
+
+ collection: $(arg collection)
+
+
+ database: $(arg database)
subst_param: true
topics:
- /${param /robot/name}/app_list
+
+ collection: $(arg collection)
+
diff --git a/jsk_robot_common/jsk_robot_startup/lifelog/lifelog_rgb_image.launch b/jsk_robot_common/jsk_robot_startup/lifelog/lifelog_rgb_image.launch
new file mode 100644
index 0000000000..6f0f1e4a28
--- /dev/null
+++ b/jsk_robot_common/jsk_robot_startup/lifelog/lifelog_rgb_image.launch
@@ -0,0 +1,19 @@
+
+
+
+
+
+
+
+
+
+
+
+ enable_monitor: false
+ vital_check: false
+
+
+
diff --git a/jsk_robot_common/jsk_robot_startup/lifelog/mongodb.launch b/jsk_robot_common/jsk_robot_startup/lifelog/mongodb.launch
index 13c62d42f4..2a60fe5e16 100644
--- a/jsk_robot_common/jsk_robot_startup/lifelog/mongodb.launch
+++ b/jsk_robot_common/jsk_robot_startup/lifelog/mongodb.launch
@@ -10,17 +10,25 @@
+
+
+
+
+ output="screen" machine="$(arg machine)">
+
+ extra_collections: $(arg extra_collections)
+
+
@@ -34,6 +42,7 @@
+
diff --git a/jsk_robot_common/jsk_robot_startup/lifelog/tweet.launch b/jsk_robot_common/jsk_robot_startup/lifelog/tweet.launch
index b22b0d066c..827bef6832 100644
--- a/jsk_robot_common/jsk_robot_startup/lifelog/tweet.launch
+++ b/jsk_robot_common/jsk_robot_startup/lifelog/tweet.launch
@@ -27,12 +27,21 @@
output="$(arg output)" respawn="true" >
+
+
+ account_info: $(arg account_info)
+
+
+
+
+
waking-time *waking-target-second*)
- (incf *waking-target-second* *waking-tweet-second*)
- ;; tweet source of robot-interface
- (unless *src-lines*
- (let* ((dirname (ros::rospack-find "pr2eus"))
- (fname (format nil "~A/robot-interface.l" dirname))
- str)
- (with-open-file (f fname)
- (while (setq str (read-line f nil nil))
- (push str *src-lines*)))
- (setq *src-lines* (nreverse *src-lines*))
- ))
+ (if *enable*
+ (progn
+ (setq *user-name* (ros::get-param "/active_user/launch_user_name")
+ *elapsed-time* (ros::get-param "/active_user/elapsed_time"))
+ ;; tweet depend on up time
+ (let ((st (ros::get-param "/active_user/start_time")))
+ (when st
+ (let ((waking-time (- (send (ros::time-now) :to-sec) st)))
+ (ros::ros-debug "~A waking ~A sec (~A)" *robot-name* waking-time *waking-target-second*)
+ (when (> waking-time *waking-target-second*)
+ (incf *waking-target-second* (+ *waking-tweet-second* (random *tweet-random-range*)))
+ ;; tweet source of robot-interface
+ (unless *src-lines*
+ (let* ((dirname (ros::rospack-find "pr2eus"))
+ (fname (format nil "~A/robot-interface.l" dirname))
+ str)
+ (with-open-file (f fname)
+ (while (setq str (read-line f nil nil))
+ (push str *src-lines*)))
+ (setq *src-lines* (nreverse *src-lines*))
+ ))
- (let* ((len (length *src-lines*))
- (start-n (floor (random (float len) *random-state*)))
- (spos 0) (str-len 0) lines)
- (push (format nil "I am running ~A min." (round (/ waking-time 60.0)))
- lines)
- (incf str-len (length (car lines)))
- (while (< (+ start-n spos) len)
- (let ((str (elt *src-lines* (+ start-n spos))))
- (incf str-len (length str))
- (if (> str-len 140) (return))
- (push str lines))
- (incf spos))
- (let* ((ln (apply #'+ (length lines)
- (mapcar #'(lambda (x) (length x)) lines)))
- (dt (make-string (1- ln)))
- (pos 0))
- (dolist (s (nreverse lines))
- (replace dt s :start1 pos)
- (incf pos (length s))
- (if (< pos (- ln 2)) (setf (elt dt pos) 10))
- (incf pos))
- (tweet-string dt :warning-time 1 :with-image t)
- ))
- ))))
+ (let* ((len (length *src-lines*))
+ (start-n (floor (random (float len) *random-state*)))
+ (spos 0) (str-len 0) lines)
+ (push (format nil "I am running ~A min." (round (/ waking-time 60.0)))
+ lines)
+ (incf str-len (length (car lines)))
+ (while (< (+ start-n spos) len)
+ (let ((str (elt *src-lines* (+ start-n spos))))
+ (incf str-len (length str))
+ (if (> str-len 140) (return))
+ (push str lines))
+ (incf spos))
+ (let* ((ln (apply #'+ (length lines)
+ (mapcar #'(lambda (x) (length x)) lines)))
+ (dt (make-string (1- ln)))
+ (pos 0))
+ (dolist (s (nreverse lines))
+ (replace dt s :start1 pos)
+ (incf pos (length s))
+ (if (< pos (- ln 2)) (setf (elt dt pos) 10))
+ (incf pos))
+ (tweet-string dt :warning-time 1 :with-image t
+ :speak *speak-enable*
+ :volume *volume*)
+ ))))))))
+ (ros::spin-once)
(ros::sleep)
)
diff --git a/jsk_robot_common/jsk_robot_startup/lifelog/tweet_client_warning.l b/jsk_robot_common/jsk_robot_startup/lifelog/tweet_client_warning.l
index 7ec7e3dceb..0f0c1d1b03 100755
--- a/jsk_robot_common/jsk_robot_startup/lifelog/tweet_client_warning.l
+++ b/jsk_robot_common/jsk_robot_startup/lifelog/tweet_client_warning.l
@@ -2,41 +2,67 @@
(ros::roseus "twitter_client_warning")
+(load "package://roseus/euslisp/dynamic-reconfigure-server.l")
(load "package://jsk_robot_startup/lifelog/tweet_client.l")
(ros::load-ros-manifest "diagnostic_msgs")
+(setq *volume* (ros::get-param "~volume" 1.0))
+(setq *speak-enable* (ros::get-param "~speak_enable" t))
+(setq *enable* (ros::get-param "~enable" t))
+(setq *reconfigure-server*
+ (def-dynamic-reconfigure-server
+ ;;; ((name type level description (default) (min) (max) (edit_method)) ... )
+ (("volume" double_t 0 "tweet speak volume" 1.0 0.0 1.0)
+ ("speak_enable" bool_t 0 "tweet speak enable" t)
+ ("enable" bool_t 0 "tweet enable" t))
+ ;; use lamda-closure to avoid memory error
+ '(lambda-closure nil 0 0 (cfg level)
+ (let ((prev-volume *volume*)
+ (prev-speak-enable *speak-enable*)
+ (prev-enable *enable*))
+ (setq *volume* (cdr (assoc "volume" cfg :test #'equal)))
+ (setq *speak-enable* (cdr (assoc "speak_enable" cfg :test #'equal)))
+ (setq *enable* (cdr (assoc "enable" cfg :test #'equal)))
+ (if (null (equal *volume* prev-volume))
+ (ros::ros-warn "Volume changed to: ~A" *volume*))
+ (if (null (equal *enable* prev-enable))
+ (ros::ros-warn "Enable changed to: ~A" *enable*))
+ (if (null (equal *speak-enable* prev-speak-enable))
+ (ros::ros-warn "Speak enable changed to: ~A" *speak-enable*)))
+ cfg)))
+
(defun diagnostics-cb (msg)
- (let ((diagnostics (make-hash-table :test #'equal))
- (tm (ros::time-now))
- status id)
- (ros::ros-debug (format nil "~0,3f diagnostics_msgs~%" (send tm :to-sec)))
- (dolist (status (send msg :status))
- ;; diagnostic_msgs::DiagnosticStatus::*WARN*
- (when (>= (send status :level) diagnostic_msgs::DiagnosticStatus::*WARN*) ;; diagnostic_msgs::DiagnosticStatus::*ERROR*)
- (cond ((substringp "/Motors" (send status :name))
- t) ;; skip motors
- ((substringp "/Other/Accelerometer" (send status :name)) t)
- ((substringp "/Other/Pressure" (send status :name)) t)
- ((and (string= "/Computers/Network/Wifi Status (ddwrt)" (send status :name))
- (string= "Updates Stale" (send status :message))) t)
- ((and (string= "/Computers/Network" (send status :name))
- (string= "Error" (send status :message))) t)
- ((substringp "/Peripherals/PS3 Controller" (send status :name)) t) ;; fetch joystick warning
- ((position #\/ (send status :name) :count 2) ;; check depth of name
- (setq key (subseq (send status :name) 0 (position #\/ (send status :name) :count 2)))
- (when (> (length (send status :name)) (length (gethash key diagnostics)))
- (setf (gethash key diagnostics) (cons (send status :name) (send status :message)))
- ) ;; when
- ))
- )) ;; when / dolist
- (maphash #'(lambda (k v) (ros::ros-debug (format nil "Warnings ~A ~A~%" (length status) v)) (push v status)) diagnostics)
- (when status
- (setq id (random (length status)))
- (when (= (mod (round (send tm :sec)) 1000) 0)
- (tweet-string (format nil "Warning!! ~A is ~A at ~0,3f" (car (elt status id)) (cdr (elt status id)) (send tm :to-sec))
- :warning-time 1 :with-image t)
- )) ;; when
- )) ;; let
+ (if *enable*
+ (let ((diagnostics (make-hash-table :test #'equal))
+ (tm (ros::time-now))
+ status id)
+ (ros::ros-debug (format nil "~0,3f diagnostics_msgs~%" (send tm :to-sec)))
+ (dolist (status (send msg :status))
+ ;; diagnostic_msgs::DiagnosticStatus::*WARN*
+ (when (>= (send status :level) diagnostic_msgs::DiagnosticStatus::*WARN*) ;; diagnostic_msgs::DiagnosticStatus::*ERROR*)
+ (cond ((substringp "/Motors" (send status :name))
+ t) ;; skip motors
+ ((substringp "/Other/Accelerometer" (send status :name)) t)
+ ((substringp "/Other/Pressure" (send status :name)) t)
+ ((and (string= "/Computers/Network/Wifi Status (ddwrt)" (send status :name))
+ (string= "Updates Stale" (send status :message))) t)
+ ((and (string= "/Computers/Network" (send status :name))
+ (string= "Error" (send status :message))) t)
+ ((substringp "/Peripherals/PS3 Controller" (send status :name)) t) ;; fetch joystick warning
+ ((position #\/ (send status :name) :count 2) ;; check depth of name
+ (setq key (subseq (send status :name) 0 (position #\/ (send status :name) :count 2)))
+ (when (> (length (send status :name)) (length (gethash key diagnostics)))
+ (setf (gethash key diagnostics) (cons (send status :name) (send status :message)))
+ ) ;; when
+ ))
+ )) ;; when / dolist
+ (maphash #'(lambda (k v) (ros::ros-debug (format nil "Warnings ~A ~A~%" (length status) v)) (push v status)) diagnostics)
+ (when status
+ (setq id (random (length status)))
+ (when (= (mod (round (send tm :sec)) 1000) 0)
+ (tweet-string (format nil "Warning!! ~A is ~A at ~0,3f" (car (elt status id)) (cdr (elt status id)) (send tm :to-sec))
+ :warning-time 1 :with-image t :volume *volume* :speak *speak-enable*)))
+ )))
(ros::advertise "/tweet" std_msgs::String 1)
(ros::subscribe "/diagnostics_agg" diagnostic_msgs::DiagnosticArray #'diagnostics-cb)
diff --git a/jsk_robot_common/jsk_robot_startup/lifelog/tweet_client_worktime.l b/jsk_robot_common/jsk_robot_startup/lifelog/tweet_client_worktime.l
index dac8769842..52baa59aaf 100755
--- a/jsk_robot_common/jsk_robot_startup/lifelog/tweet_client_worktime.l
+++ b/jsk_robot_common/jsk_robot_startup/lifelog/tweet_client_worktime.l
@@ -2,6 +2,7 @@
(ros::roseus "twitter_client_worktime")
+(load "package://roseus/euslisp/dynamic-reconfigure-server.l")
(load "package://jsk_robot_startup/lifelog/tweet_client.l")
(defvar *robot-name* "robot")
@@ -34,49 +35,78 @@
(t
(setq *waking-target-second* *waking-tweet-second*)))
+(setq *volume* (ros::get-param "~volume" 1.0))
+(setq *speak-enable* (ros::get-param "~speak_enable" t))
+(setq *enable* (ros::get-param "~enable" t))
+(setq *reconfigure-server*
+ (def-dynamic-reconfigure-server
+ ;;; ((name type level description (default) (min) (max) (edit_method)) ... )
+ (("volume" double_t 0 "tweet speak volume" 1.0 0.0 1.0)
+ ("speak_enable" bool_t 0 "tweet speak enable" t)
+ ("enable" bool_t 0 "tweet enable" t))
+ ;; use lamda-closure to avoid memory error
+ '(lambda-closure nil 0 0 (cfg level)
+ (let ((prev-volume *volume*)
+ (prev-speak-enable *speak-enable*)
+ (prev-enable *enable*))
+ (setq *volume* (cdr (assoc "volume" cfg :test #'equal)))
+ (setq *speak-enable* (cdr (assoc "speak_enable" cfg :test #'equal)))
+ (setq *enable* (cdr (assoc "enable" cfg :test #'equal)))
+ (if (null (equal *volume* prev-volume))
+ (ros::ros-warn "Volume changed to: ~A" *volume*))
+ (if (null (equal *enable* prev-enable))
+ (ros::ros-warn "Enable changed to: ~A" *enable*))
+ (if (null (equal *speak-enable* prev-speak-enable))
+ (ros::ros-warn "Speak enable changed to: ~A" *speak-enable*)))
+ cfg)))
+
(ros::advertise "/tweet" std_msgs::String 1)
(ros::rate 0.1)
(do-until-key
- (setq *user-name* (ros::get-param "/active_user/launch_user_name")
- *elapsed-time* (ros::get-param "/active_user/elapsed_time"))
- (ros::ros-debug "user -> ~A, time -> ~A (~A) "
- *user-name* *elapsed-time* *target-second*)
- ;; tweet depend on working time
- (when (> *elapsed-time* *target-second*)
- (incf *target-second* *tweet-second* )
- (ros::ros-info "tweet ~A ~A" *user-name* *elapsed-time*)
- (let ((mainstr (format nil "~A has used ~A for ~d minutes"
- ;; why delete *user-name* after space ?
- ;;(subseq *user-name* 0
- ;;(or (position #\space *user-name*)
- ;;(length *user-name*)))
- *user-name*
- *robot-name*
- (round (/ *elapsed-time* 60))))
- presubstr postsubstr)
- (cond
- ((< *elapsed-time* 600) ;; 5 min
- (setq presubstr "Congratulations! "
- postsubstr ", Let's get started!"))
- ((< *elapsed-time* 910) ;; 15 min
- (setq presubstr "Gooood! "
- postsubstr ", Go ahead!"))
- ((< *elapsed-time* 1820) ;; 30 min
- (setq presubstr "So Nice! "
- postsubstr ", Go ahead!"))
- ((< *elapsed-time* 2730) ;; 45 min
- (setq presubstr "Fantastic! "
- postsubstr ", Keep going!"))
- ((< *elapsed-time* 3640) ;; 60 min
- (setq presubstr "Amazing! "
- postsubstr ", I'm not tired!"))
- (t
- (setq presubstr "Awesome! "
- postsubstr ", Got some rest?")))
-
- (tweet-string (format nil "~A~A~A" presubstr mainstr postsubstr)
- :warning-time 1 :with-image t)
+ (if *enable*
+ (progn
+ (setq *user-name* (ros::get-param "/active_user/launch_user_name")
+ *elapsed-time* (ros::get-param "/active_user/elapsed_time"))
+ (ros::ros-debug "user -> ~A, time -> ~A (~A) "
+ *user-name* *elapsed-time* *target-second*)
+ ;; tweet depend on working time
+ (when (> *elapsed-time* *target-second*)
+ (incf *target-second* *tweet-second* )
+ (ros::ros-info "tweet ~A ~A" *user-name* *elapsed-time*)
+ (let ((mainstr (format nil "~A has used ~A for ~d minutes"
+ ;; why delete *user-name* after space ?
+ ;;(subseq *user-name* 0
+ ;;(or (position #\space *user-name*)
+ ;;(length *user-name*)))
+ *user-name*
+ *robot-name*
+ (round (/ *elapsed-time* 60))))
+ presubstr postsubstr)
+ (cond
+ ((< *elapsed-time* 600) ;; 5 min
+ (setq presubstr "Congratulations! "
+ postsubstr ", Let's get started!"))
+ ((< *elapsed-time* 910) ;; 15 min
+ (setq presubstr "Gooood! "
+ postsubstr ", Go ahead!"))
+ ((< *elapsed-time* 1820) ;; 30 min
+ (setq presubstr "So Nice! "
+ postsubstr ", Go ahead!"))
+ ((< *elapsed-time* 2730) ;; 45 min
+ (setq presubstr "Fantastic! "
+ postsubstr ", Keep going!"))
+ ((< *elapsed-time* 3640) ;; 60 min
+ (setq presubstr "Amazing! "
+ postsubstr ", I'm not tired!"))
+ (t
+ (setq presubstr "Awesome! "
+ postsubstr ", Got some rest?")))
- ))
+ (tweet-string (format nil "~A~A~A" presubstr mainstr postsubstr)
+ :warning-time 1 :with-image t
+ :speak *speak-enable*
+ :volume *volume*)
+ ))))
+ (ros::spin-once)
(ros::sleep)
)
diff --git a/jsk_robot_common/jsk_robot_startup/scripts/shutdown.py b/jsk_robot_common/jsk_robot_startup/scripts/shutdown.py
index ff05431dbc..97bab6c60f 100755
--- a/jsk_robot_common/jsk_robot_startup/scripts/shutdown.py
+++ b/jsk_robot_common/jsk_robot_startup/scripts/shutdown.py
@@ -1,9 +1,11 @@
#!/usr/bin/env python
+# -*- coding: utf-8 -*-
import os
from importlib import import_module
import rospy
+from sound_play.libsoundplay import SoundClient
from std_msgs.msg import Empty
@@ -32,7 +34,7 @@ class Shutdown(object):
def __init__(self):
rospy.loginfo('Start shutdown node.')
-
+ self.client_jp = SoundClient(sound_action='/robotsound_jp', blocking=True)
self.condition = rospy.get_param(
'~input_condition', None)
if self.condition is not None:
@@ -51,6 +53,11 @@ def __init__(self):
'~shutdown_command', '/sbin/shutdown -h now')
self.reboot_command = rospy.get_param(
'~reboot_command', '/sbin/shutdown -r now')
+ self.volume = rospy.get_param('~volume', 1.0)
+
+ def speak(self, client, speech_text, lang='jp'):
+ client.say(speech_text, voice=lang, volume=self.volume, replace=False)
+ return client.actionclient.get_result()
def callback(self, msg):
if isinstance(msg, rospy.msg.AnyMsg):
@@ -81,6 +88,7 @@ def shutdown(self, msg):
return
rospy.loginfo('Shut down robot.')
+ self.speak(self.client_jp, 'シャットダウンします。')
ret = os.system(self.shutdown_command)
if ret != 0:
rospy.logerr("Failed to call '$ {}'. Check authentication.".format(
@@ -88,6 +96,7 @@ def shutdown(self, msg):
def reboot(self, msg):
rospy.loginfo('Reboot robot.')
+ self.speak(self.client_jp, '再起動します。')
ret = os.system(self.reboot_command)
if ret != 0:
rospy.logerr("Failed to call '$ {}'. Check authentication.".format(
diff --git a/jsk_robot_common/jsk_robot_startup/scripts/smach_to_mail.py b/jsk_robot_common/jsk_robot_startup/scripts/smach_to_mail.py
index ac911446b0..8f804b3380 100755
--- a/jsk_robot_common/jsk_robot_startup/scripts/smach_to_mail.py
+++ b/jsk_robot_common/jsk_robot_startup/scripts/smach_to_mail.py
@@ -257,6 +257,8 @@ def _send_mail(self, subject, state_list):
if subject:
email_msg.subject = subject
+ elif rospy.has_param("/email_topic/mail_title"):
+ email_msg.subject = rospy.get_param("/email_topic/mail_title")
else:
email_msg.subject = 'Message from {}'.format(rospy.get_param('/robot/name', 'robot'))
diff --git a/jsk_robot_common/jsk_robot_startup/scripts/update_workspace_main.sh b/jsk_robot_common/jsk_robot_startup/scripts/update_workspace_main.sh
new file mode 100755
index 0000000000..bb8fbba094
--- /dev/null
+++ b/jsk_robot_common/jsk_robot_startup/scripts/update_workspace_main.sh
@@ -0,0 +1,157 @@
+#!/usr/bin/env bash
+
+function usage()
+{
+ echo "Usage: $0 [-w workspace_directory] [-r rosinstall_path] [-t robot_type] [-s skip keys] [-h] [-u] [-l] [-n]
+
+optional arguments:
+ -h show this help
+ -w WORKSPACE_PATH specify target workspace
+ -r ROSINTALL_PATH rosinstall path
+ -t ROBOT robot type
+ -s SKIP_KEYS rosdep install skip keys
+ -u do not run apt-get upgrade and rosdep install
+ -l do not send a mail
+ -n do not update workspace, only show wstool status
+"
+}
+
+function get_full_path()
+{
+ echo "$(cd $(dirname $1) && pwd)/$(basename $1)"
+}
+
+ROSDEP_INSTALL=true
+SEND_MAIL=true
+UPDATE_WORKSPACE=true
+WORKSPACE=$(get_full_path $HOME/ros/$ROS_DISTRO)
+
+while getopts w:r:t:s:ulnh OPT
+do
+ case $OPT in
+ w)
+ WORKSPACE=$(get_full_path $OPTARG)
+ ;;
+ r)
+ ROSINSTALL=$(get_full_path $OPTARG)
+ ;;
+ t)
+ ROBOT_TYPE=$OPTARG
+ ;;
+ s)
+ SKIP_KEYS=$OPTARG
+ ;;
+ u)
+ ROSDEP_INSTALL=false
+ ;;
+ l)
+ SEND_MAIL=false
+ ;;
+ n)
+ UPDATE_WORKSPACE=false
+ ;;
+ h)
+ usage
+ exit 1
+ ;;
+ *)
+ usage
+ exit 1
+ ;;
+ esac
+done
+
+if [ "$WORKSPACE" = "" ]; then
+ echo "Please set valid workspace -w $WORKSPACE
"
+ exit 1
+fi
+if [ "$ROSINSTALL" = "" ]; then
+ echo "Please set valid rosinstall -r $ROSINSTALL
"
+ exit 1
+fi
+if [ "$ROBOT_TYPE" = "" ]; then
+ echo "Please set valid robot type -t $ROBOT_TYPE
"
+ exit 1
+fi
+
+
+. $WORKSPACE/devel/setup.bash
+# Filename should end with .txt to preview the contents in a web browser
+LOGFILE=$WORKSPACE/update_workspace.txt
+
+TMP_MAIL_BODY_FILE=/tmp/update_workspace_mailbody.txt
+
+{
+set -x
+# Update workspace
+echo "" > $TMP_MAIL_BODY_FILE
+wstool foreach -t $WORKSPACE/src --git 'git fetch origin --prune'
+WSTOOL_STATUS=$(wstool status -t $WORKSPACE/src)
+if [ -n "$WSTOOL_STATUS" ]; then
+ echo -e "Please commit robot internal change and send pull request.
" >> $TMP_MAIL_BODY_FILE
+ echo -e $WSTOOL_STATUS >> $TMP_MAIL_BODY_FILE
+ # escape " ' , -- and add change line code to end of line
+ wstool diff -t $WORKSPACE/src | sed -e "s/'/ /g" -e "s/^--/ /g" -e 's/"/ /g' -e "s/
/\\\n/" -e 's/$/
/g' -e "s/,/ /g" | tee -a $TMP_MAIL_BODY_FILE
+fi
+if [ "${UPDATE_WORKSPACE}" == "true" ]; then
+ wstool foreach -t $WORKSPACE/src --git 'git stash'
+ wstool update -t $WORKSPACE/src jsk-ros-pkg/jsk_robot --delete-changed-uris
+ ln -sf $ROSINSTALL $WORKSPACE/src/.rosinstall
+ wstool update -t $WORKSPACE/src --delete-changed-uris
+ # Forcefully checkout specified branch
+ wstool foreach -t $WORKSPACE/src --git --shell 'branchname=$(git rev-parse --abbrev-ref HEAD); if [ $branchname != "HEAD" ]; then git reset --hard HEAD; git checkout origin/$branchname; git branch -D $branchname; git checkout -b $branchname --track origin/$branchname; fi'
+ wstool update -t $WORKSPACE/src
+ WSTOOL_UPDATE_RESULT=$?
+else
+ WSTOOL_UPDATE_RESULT=0
+fi
+# Rosdep Install
+if [ "${ROSDEP_INSTALL}" == "true" ]; then
+ sudo apt-get update -y;
+ rosdep update;
+ rosdep install --from-paths $WORKSPACE/src --ignore-src -y -r --skip-keys "$SKIP_KEYS";
+ ROSDEP_INSTALL_RESULT=$?;
+else
+ ROSDEP_INSTALL_RESULT=0;
+fi
+# Build workspace
+cd $WORKSPACE
+catkin clean aques_talk collada_urdf_jsk_patch libcmt -y
+catkin init
+catkin config -DCMAKE_BUILD_TYPE=Release
+catkin build --continue-on-failure
+CATKIN_BUILD_RESULT=$?
+# Send mail
+if [ $WSTOOL_UPDATE_RESULT -ne 0 ]; then
+ echo "Please wstool update workspace manually.
" >> $TMP_MAIL_BODY_FILE
+fi
+if [ $ROSDEP_INSTALL_RESULT -ne 0 ]; then
+ echo "Please install dependencies manually.
" >> $TMP_MAIL_BODY_FILE
+fi
+if [ $CATKIN_BUILD_RESULT -ne 0 ]; then
+ echo "Please catkin build workspace manually.
" >> $TMP_MAIL_BODY_FILE
+fi
+set +x
+} 2>&1 | tee $LOGFILE
+
+# MAIL_BODY variable cannot be set directly in a subshell. So it is set from temporary mail body text file.
+# The mail body text is put as $TMP_MAIL_BODY_FILE.
+# See https://github.com/jsk-ros-pkg/jsk_robot/issues/1569
+MAIL_BODY=$(cat $TMP_MAIL_BODY_FILE)
+echo "MAIL_BODY: $MAIL_BODY"
+
+if [ -n "$MAIL_BODY" ] && [ "${SEND_MAIL}" == "true" ]; then
+ echo "Sent a mail"
+ rostopic pub -1 /email jsk_robot_startup/Email "header:
+ seq: 0
+ stamp: {secs: 0, nsecs: 0}
+ frame_id: ''
+subject: 'Daily workspace update fails'
+body:
+- {type: 'html', message: '${MAIL_BODY}', file_path: '', img_data: '', img_size: 0}
+sender_address: '$(hostname)@jsk.imi.i.u-tokyo.ac.jp'
+receiver_address: '$ROBOT_TYPE@jsk.imi.i.u-tokyo.ac.jp'
+smtp_server: ''
+smtp_port: ''
+attached_files: ['$LOGFILE']"
+fi
diff --git a/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/action_logger.py b/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/action_logger.py
index d42e5d89f4..8fe84131a3 100644
--- a/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/action_logger.py
+++ b/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/action_logger.py
@@ -22,7 +22,10 @@ class ActionLogger(LoggerBase):
subscribers = {} # topicname:subscriber
def __init__(self):
- LoggerBase.__init__(self)
+ db_name = rospy.get_param('~database', 'jsk_robot_lifelog')
+ col_name = rospy.get_param('~collection', None)
+
+ super(ActionLogger, self).__init__(db_name=db_name, col_name=col_name)
self.queue_size = rospy.get_param("~queue_size", 30)
self.action_regex = re.compile(".*Action(Result|Goal|Feedback)$")
diff --git a/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/base_trajectory_logger.py b/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/base_trajectory_logger.py
index 664f8fac94..c870cab227 100644
--- a/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/base_trajectory_logger.py
+++ b/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/base_trajectory_logger.py
@@ -31,7 +31,11 @@ def diff_pose(p1, p2):
class BaseTrajectoryLogger(LoggerBase):
def __init__(self):
- LoggerBase.__init__(self)
+ db_name = rospy.get_param('~database', 'jsk_robot_lifelog')
+ col_name = rospy.get_param('~collection', None)
+
+ super(BaseTrajectoryLogger, self).__init__(db_name=db_name, col_name=col_name)
+
self.update_rate = rospy.get_param("~update_rate", 1.0)
self.use_amcl = rospy.get_param("~use_amcl", True)
self.persistent = rospy.get_param("~persistent", True)
diff --git a/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/mongo_record.py b/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/mongo_record.py
index 71803288c1..eed8897950 100644
--- a/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/mongo_record.py
+++ b/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/mongo_record.py
@@ -20,6 +20,7 @@ def __init__(self, argv=None):
self.queue_size = rospy.get_param("~queue_size", 1)
self.update_rate = rospy.get_param("~update_rate", 1.0)
subst_param = rospy.get_param("~subst_param", False)
+ database = rospy.get_param("~database", 'jsk_robot_lifelog')
collection = rospy.get_param("~collection", None)
else:
args = self.parse_args(argv)
@@ -28,6 +29,7 @@ def __init__(self, argv=None):
self.queue_size = args.queue_size
self.update_rate = args.update_rate
subst_param = args.subst_param
+ database = args.database
collection = args.collection
self.subscribers = {}
@@ -42,7 +44,7 @@ def __init__(self, argv=None):
topics.append(str().join(splitted))
self.topics = topics
- LoggerBase.__init__(self, col_name=collection)
+ LoggerBase.__init__(self, db_name=database, col_name=collection)
def parse_args(self, argv):
p = argparse.ArgumentParser()
@@ -57,6 +59,8 @@ def parse_args(self, argv):
help="Enable substring param (e,g, '$(param robot/name)/list')")
p.add_argument("-r", "--update-rate", type=float, default=1.0,
help="Update rate for checking topics")
+ p.add_argument("-d", "--database", type=str, default=None,
+ help="Database name to record data")
p.add_argument("-c", "--collection", type=str, default=None,
help="Collection name to record data")
return p.parse_args(argv)
diff --git a/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/object_detection_logger.py b/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/object_detection_logger.py
index 4b607dade1..f8623ba2cd 100644
--- a/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/object_detection_logger.py
+++ b/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/object_detection_logger.py
@@ -16,7 +16,11 @@
class ObjectDetectionLogger(LoggerBase):
def __init__(self):
- LoggerBase.__init__(self)
+ db_name = rospy.get_param('~database', 'jsk_robot_lifelog')
+ col_name = rospy.get_param('~collection', None)
+
+ super(ObjectDetectionLogger, self).__init__(db_name=db_name, col_name=col_name)
+
self.update_rate = rospy.get_param("~update_rate", 1.0)
self.map_frame = rospy.get_param('~map_frame', 'map')
self.robot_frame = rospy.get_param('~robot_frame', 'base_footprint')
diff --git a/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/tf_logger.py b/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/tf_logger.py
index 38192b7737..42f0fdbe5e 100644
--- a/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/tf_logger.py
+++ b/jsk_robot_common/jsk_robot_startup/src/jsk_robot_startup/lifelog/tf_logger.py
@@ -13,7 +13,10 @@
class TFLogger(LoggerBase):
def __init__(self):
- LoggerBase.__init__(self)
+ db_name = rospy.get_param('~database', 'jsk_robot_lifelog')
+ col_name = rospy.get_param('~collection', None)
+
+ super(TFLogger, self).__init__(db_name=db_name, col_name=col_name)
self.tf_buffer = tf2_ros.Buffer()
self.tf_listener = tf2_ros.TransformListener(self.tf_buffer)
diff --git a/jsk_robot_common/jsk_robot_startup/src/lightweight_logger_nodelet.cpp b/jsk_robot_common/jsk_robot_startup/src/lightweight_logger_nodelet.cpp
index c357e44273..e16b176b6c 100644
--- a/jsk_robot_common/jsk_robot_startup/src/lightweight_logger_nodelet.cpp
+++ b/jsk_robot_common/jsk_robot_startup/src/lightweight_logger_nodelet.cpp
@@ -49,8 +49,23 @@ namespace jsk_robot_startup
jsk_topic_tools::StealthRelay::onInit();
// settings for database
- nh_->param("/robot/database", db_name_, "jsk_robot_lifelog");
- nh_->param("/robot/name", col_name_, std::string());
+ if (ros::param::has(pnh_->resolveName("database")))
+ {
+ pnh_->param("database", db_name_, "jsk_robot_lifelog");
+ }
+ else
+ {
+ pnh_->param("/robot/database", db_name_, "jsk_robot_lifelog");
+ }
+ if (ros::param::has(pnh_->resolveName("collection")))
+ {
+ pnh_->param("collection", col_name_, std::string());
+ }
+ else
+ {
+ pnh_->param("/robot/name", col_name_, std::string());
+ }
+
if (col_name_.empty())
{
NODELET_FATAL_STREAM("Please specify param 'robot/name' (e.g. pr1012, olive)");
@@ -123,7 +138,7 @@ namespace jsk_robot_startup
// The message store object is initialized here, since the object waits for connection
// until the connection to the server is established.
- msg_store_.reset(new mongodb_store::MessageStoreProxy(*nh_, col_name_, db_name_));
+ msg_store_.reset(new mongodb_store::MessageStoreProxy(*pnh_, col_name_, db_name_));
initialized_ = true;
// After message store object is initialized, this thread is re-used for
@@ -183,7 +198,9 @@ namespace jsk_robot_startup
const boost::shared_ptr& msg = event.getConstMessage();
jsk_topic_tools::StealthRelay::inputCallback(msg);
- vital_checker_->poke();
+ if (vital_checker_ != nullptr) {
+ vital_checker_->poke();
+ }
bool on_the_fly = initialized_ && buffer_.empty();
if (!wait_for_insert_ && msg_store_->getNumInsertSubscribers() == 0) {
@@ -231,7 +248,7 @@ namespace jsk_robot_startup
} else if (!initialized_) {
stat.summary(diagnostic_msgs::DiagnosticStatus::ERROR,
getName() + " is taking too long to be initialized");
- } else if (vital_check_ && !vital_checker_->isAlive()) {
+ } else if (vital_checker_ != nullptr && vital_check_ && !vital_checker_->isAlive()) {
jsk_topic_tools::addDiagnosticErrorSummary(getName(), vital_checker_, stat);
} else if (insert_error_count_ != prev_insert_error_count_) {
stat.summary(diagnostic_msgs::DiagnosticStatus::ERROR,
@@ -244,7 +261,9 @@ namespace jsk_robot_startup
stat.add("Inserted", inserted_count_);
stat.add("Insert Failure", insert_error_count_);
- vital_checker_->registerStatInfo(stat, "Last Insert");
+ if (vital_checker_ != nullptr) {
+ vital_checker_->registerStatInfo(stat, "Last Insert");
+ }
}
} // lifelog
} // jsk_robot_startup