Prometheus交流群答疑精选
注:
- 题目与答案为人工搬运,仅做解决问题参考,不一定是准确答案
Q: 我早上是自己改了pos_contorller_PID.h,想跑自己的算法。 编译无问题,但飞机飞不动, 晚上我又弄了prometheus本身的pos_contorller_PID.h。编译后,飞机也飞不起来。sitl_control.launch 运行这个 ,无任何报错,固件用的就是prometheus_px4,上个月跑无任何问题,只是最近在研究怎么用新方法去实验位置控制。
A: 那证明是你改的问题呀,你仔细检查一下吧,如果只是改了位置环的控制器那几行,不会这样的
Q: 现在运行 sitl_control.launch 其他都ok,就是会显示这种:

A: 不应该要融合baro,融合的是vision,还是固件或者参数问题,你把px4固件重新编译一下,仔细检查版本,实在不行 都删了重装一下,也就20分钟的事
A: 我之前遇到过,重新编译解决的~~~
Q: PLException:Invalid roslaunch XML sysntax :mismatched reg:line227,column, i,The tranaceback for the exception was exception was writen to the log file? 这是咋回事呀

A: 安装必备依赖项
sudo apt install xmlstarlet

Q: 请问有有人在英伟达的板子上跑过仿真嘛,mavros一直就连不上,换了板子重装也不好使电脑就可以连上
A: 终结此话题:仿真不能在tx2上跑,更加不推荐。仿真的合理配置是高性能的台式机。
Q: Parmeter MPC_Z_VEL_MAX_DOWN not found 报错有影响吗

Q: 请问一下,这个文章里面所说的prometheus镜像,是Ubuntu安装环境吧,这个镜像在哪里可以下载吗?
A: 镜像地址 : https://mp.weixin.qq.com/s/rAtXVP2S5b1nGyHiY0eXgQ##
Q: 测试pX4出错,请问怎么解决呀

A: 运行这段报错不影响运行,可以不用管他,主要看模型有没有正常跑出来
Q: 项目中的 UKF 你们有测试过效果吗
A: 那个还没用…被搁置了,可能有bug,一起调调
Q: 你好,想问一下,用位置环进行轨迹追踪,绿色线为期望轨迹,红色线为运行轨迹,他们怎么相差这么大啊,而且红色线看起来是随机运动的 !

A: 是不是t265出问题了啊?双目摄像头,你这是仿真?以前我真机遇到过t265出问题了红线乱飘的情况 Q: 阿木实验室里的位置环控制器的二次开发,请问一下,阿木实验室里的位置环控制器二次开发里面有用到t265吗 A: 控制算法二次开发可以使用任何导航信息,包括t265 Q: 刚才运行了一下,红线乱飘,用位置环进行轨迹追踪,绿色线为期望轨迹,红色线为运行轨迹,他们怎么相差很大 A: 因为你导航数据发散了吧,如果是买了飞机 售后问题找客服哦,仿真不会飘呢…仿真和t265没关系
Q: vector<vector ,请问一下有大佬知道这种容器的数据怎么读吗 ,嵌套的 A: 这不是二维数组吗 A: 当成一个矩阵来读。。
Q: 大家遇到过 mavros ,unsupported fcu这个问题吗?

A: 遇到过,我这边是因为qgc和mavros抢端口了
Q: 求一篇文章的pdf“Predictive control of aerial swarms in cluttered environments”,做集群的朋友可以康康
A: Predictive control of aerial swarms in cluttered environments:下载链接
Q: 您好,请问一下,树莓派4B上可以运行promethes项目吗,怕带不起来
A: 控制模块问题不大 A: opcv估计够呛
Q: 您好,我的笔记本装ubuntu官方镜像就没问题,但是一装阿木普罗米修斯镜面就找不到磁盘,安装界面就只显示我的安装u盘,这是什么情况
A: 他读取不到你本地硬盘 再外接一个硬盘就好了
A: nvme的固态 不能装系统的,系统不支持nvme协议,除此之外,几乎都支持,比如机械硬盘,传统ssd固态硬盘,普通U盘,都能安装的起来。
A: nvme 也可以装系统哈 我一会把教程发出来 ,挂一个软链接就可以了

Q: github开源的prometheus只是仿真部分吗,可不可以在部署在真机测试一下,需要有大的改动吗
A: 有基础的实物飞行(但我还没测试,目前刚把T265的定位调通,因为默认给的动捕系统实在没条件实现),在这个文件夹,切记,要从prometheus_px4编译固件烧录到实际飞机中

Q: 请问大家在集群控制例程仿真时,有没有遇到这个问题?lanuch 文件sitl_swarm_4uAV.launch

A: 你没编译上,或者source失败,系统找不到node,编译啊。。。
Q: 请问将sitl_swarm_control_3uav.launch文件中的控制模式改为速度追踪,在swarm_controller.cpp中改变了算法的参数,但是最后在gazebo中让飞机飞行时和原来的效果一样,看不出有什么区别,这是怎么回事呢?参数试了多次,差距很大,参数全为0也和原来一样

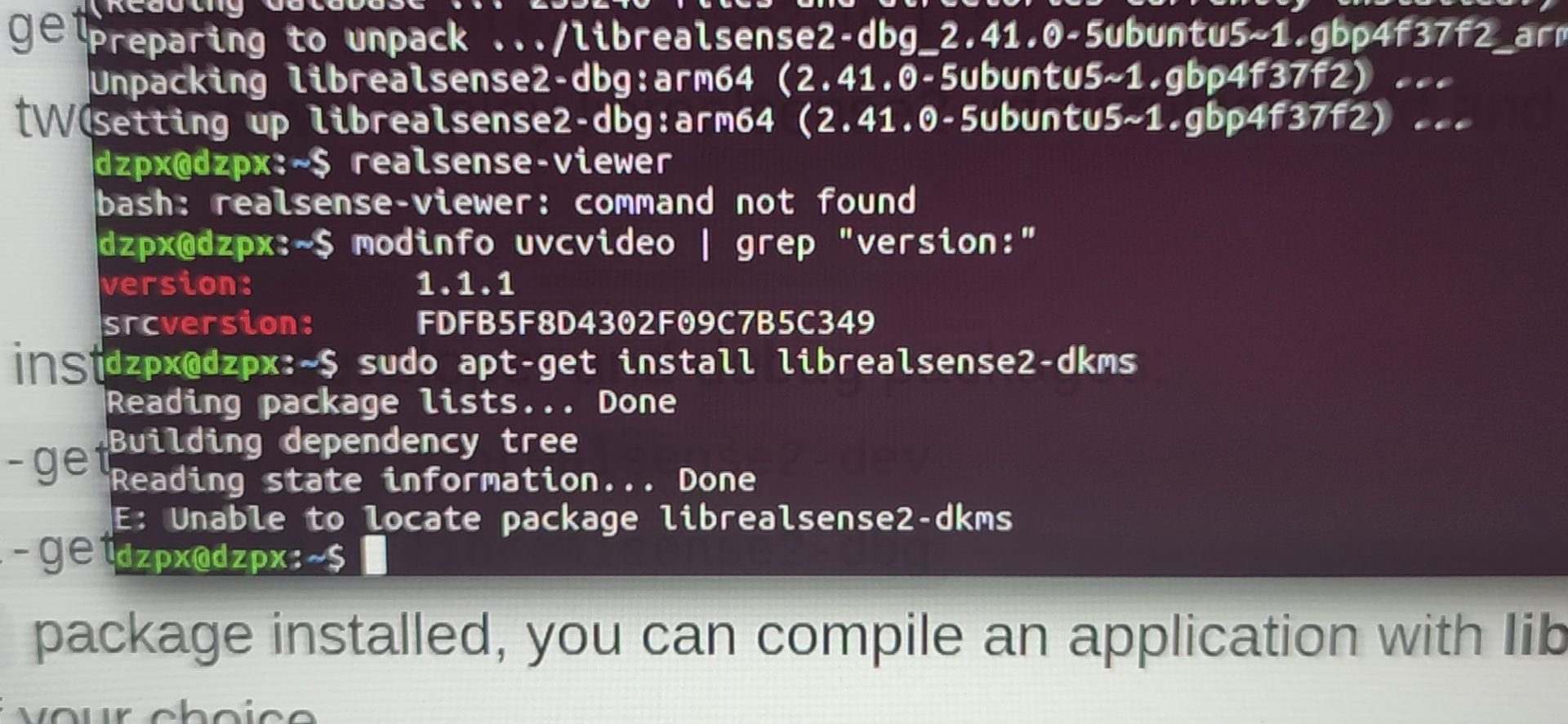
Q: 大家有没有遇到 libreaksense2-dkms 无法定位文件这个问题?
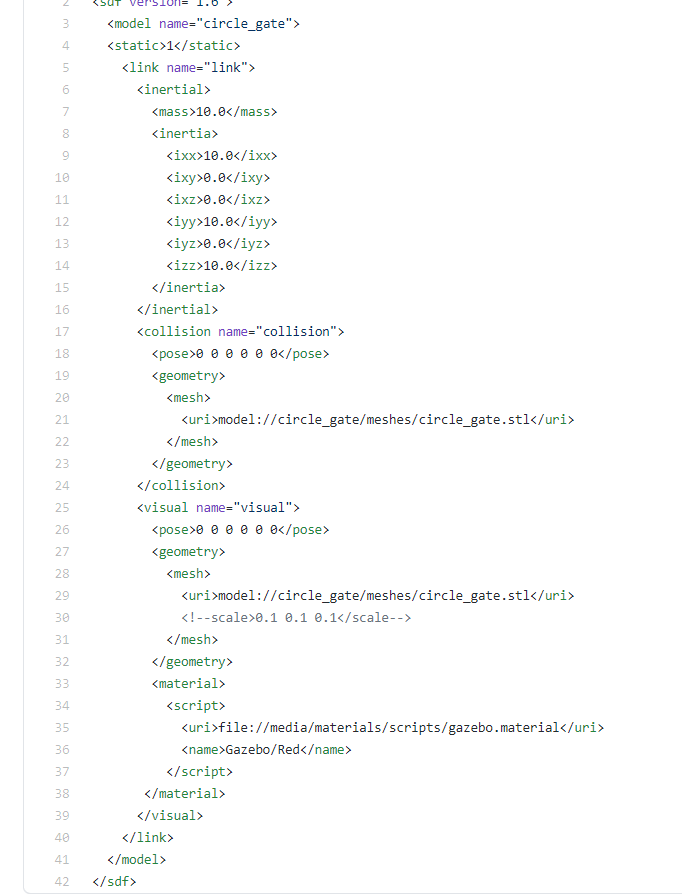
Q: 请问prometheus里面穿框用的框的gazebo模型如何设置碰撞属性呢,我自己添加了别的形状stl文件,替换了里面的框形状的stl文件,但是前者不具有碰撞属性,后者是具有的,我是用catia画的模型然后转成stl文件的
A: URDF还是SDF呀?如果是URDF可以参考下面的链接
http://gazebosim.org/tutorials?tut=ros_urdf&cat=connect_ros
Q: sdf的,我就画个方形的框,我看到阿木里面是圆框,然后设置碰撞属性那我直接替换成了我的stl文件,但是飞机直接从框的外形穿过去了,visual属性都换了的,那个框的sdf里面只要涉及到stl文件的都换我自己的了,不知道是不是和我画用的软件有关系,剩下的都是用的阿木里面的这个sdf

A: 你可以试试blender
Q: 问题解决了,换solidwork就可以了
Q: 有人用联想Y9000K2020么?[苦涩]有遇到过装双系统直接花屏的情况嘛?[苦涩]
A: 我台式机之前装Prometheus的镜像也是直接花屏,然后曲线方式,在笔记本上把Prometheus的镜像装到u盘里,然后插到台式机上配置使用
A: 禁用独显以后再试试,我联想r7000之前也是花屏
Q: prometheus的slam模块在xavier上编译 报缺少emmintrin.h这个错,我查的这个头文件只有x86架构才有,所以这个仿真不能直接抄到 arm64上吗?
A: 仿真不能在arm平台运行,项目可以部署在arm平台

A: YES
Q: 我用这个跑了下仿真,然后飞机节点没起来?但是部署应该没什么问题

A: 跑的什么节点? Q: px4.sitl,进gazebo后没话题出来,z8300就是一个凌动,赛扬都比他强 A: 我没用gazebo 用的px4的飞控,控制模块是可以移植的
Q: gazebo里无人机只能飞50m,我想飞100m需要改world嘛,我改了launch没有用
A: 设置控制算法中的geo_fence地理围栏参数,改大一点
Q: 是这个文件吗

A: 你跑的哪个launch,自己对应找一下参数文件在哪


Q: 想问大家一下,我在运行make px4_sitl gazebod 时候,显示没有安装numpy,之后我安装成功了,再次运行make px4_sitl gazebo,还出现没有安装numpy ? 我的python是2.7版本的,大家知道是什么原因嘛

A: 去px4 GitHub issue去查关键词
A: 应该是make px… 用的python环境和你安装numpy发的python环境不一致。建议先了解缺少numpy包的python环境,针对缺包的python环境安装对应的numpy
Q: 运行仿真的launch文件,有时候会加载特别久,有什么好的方法可以加快打开速度的吗?
A: 看一下wiki,需要切换PX4的分支,看一下wiki,离线下载一下gazebo模型

