Internal
PowerSimulationsDynamics.BUILD_STATUS — TypeDefines the status of the simulation object
PowerSimulationsDynamics.BranchWrapper — TypeWraps DynamicBranch devices from PowerSystems to handle changes in controls and connection status, and allocate the required indexes of the state space.
PowerSimulationsDynamics.DynamicWrapper — TypeWraps DynamicInjection devices from PowerSystems to handle changes in controls and connection status, and allocate the required indexes of the state space.
PowerSimulationsDynamics.SimulationInputs — MethodSimulationInputs build function for MassMatrixModels
PowerSimulationsDynamics.SimulationInputs — MethodSimulationInputs build function for ResidualModels
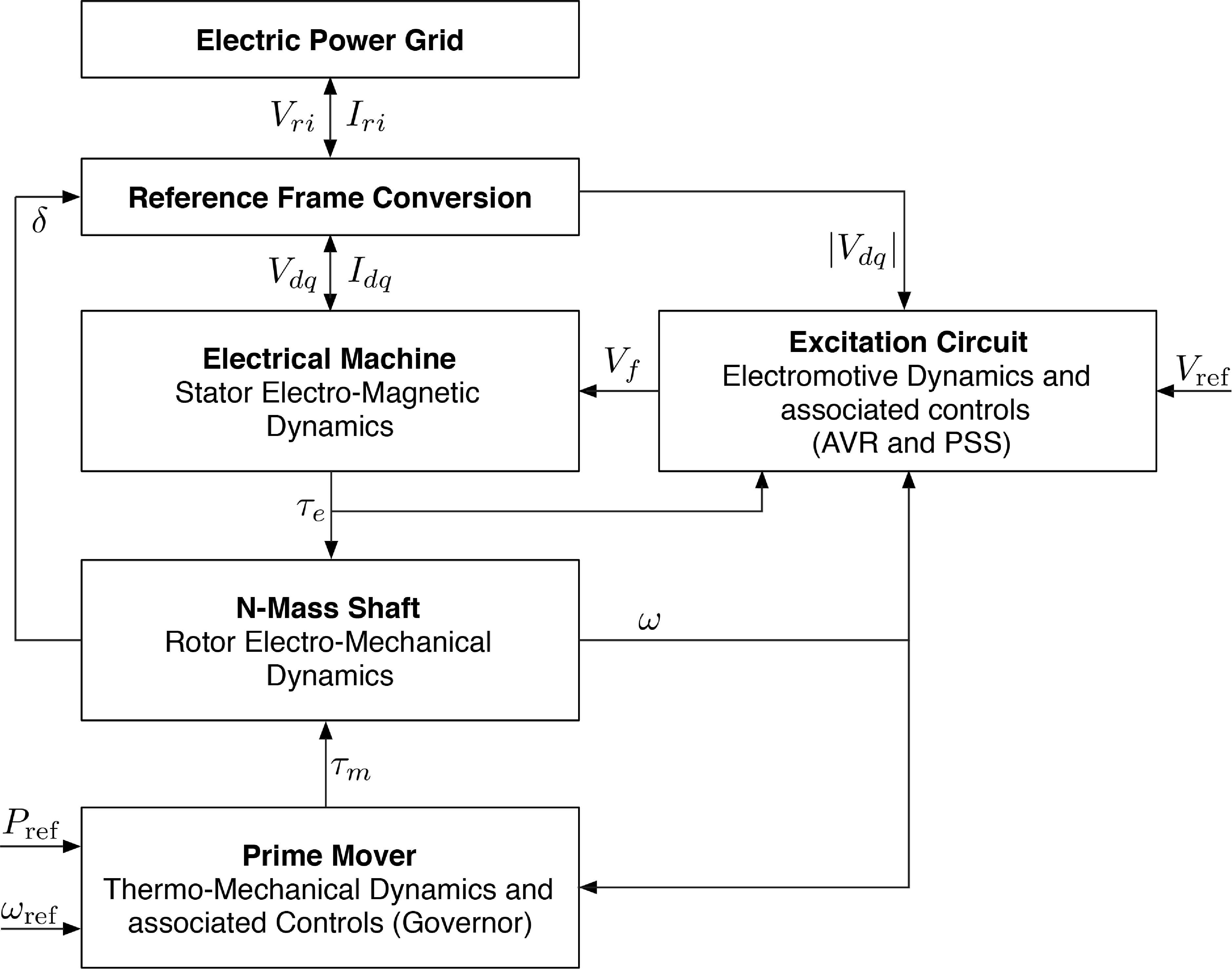
PowerSimulationsDynamics.generator_inner_vars — TypeGenerator Inner Vars:
τe_var:: Electric torqueτm_var:: Mechanical torqueVf_var:: Field voltageV_pss_var:: Additional PSS voltageVR_gen_var:: Real part of the terminal voltageVI_gen_var:: Imaginary part of the terminal voltageψd_var:: Stator Flux (if defined) in the d-axisψq_var:: Stator Flux (if defined) in the q-axis
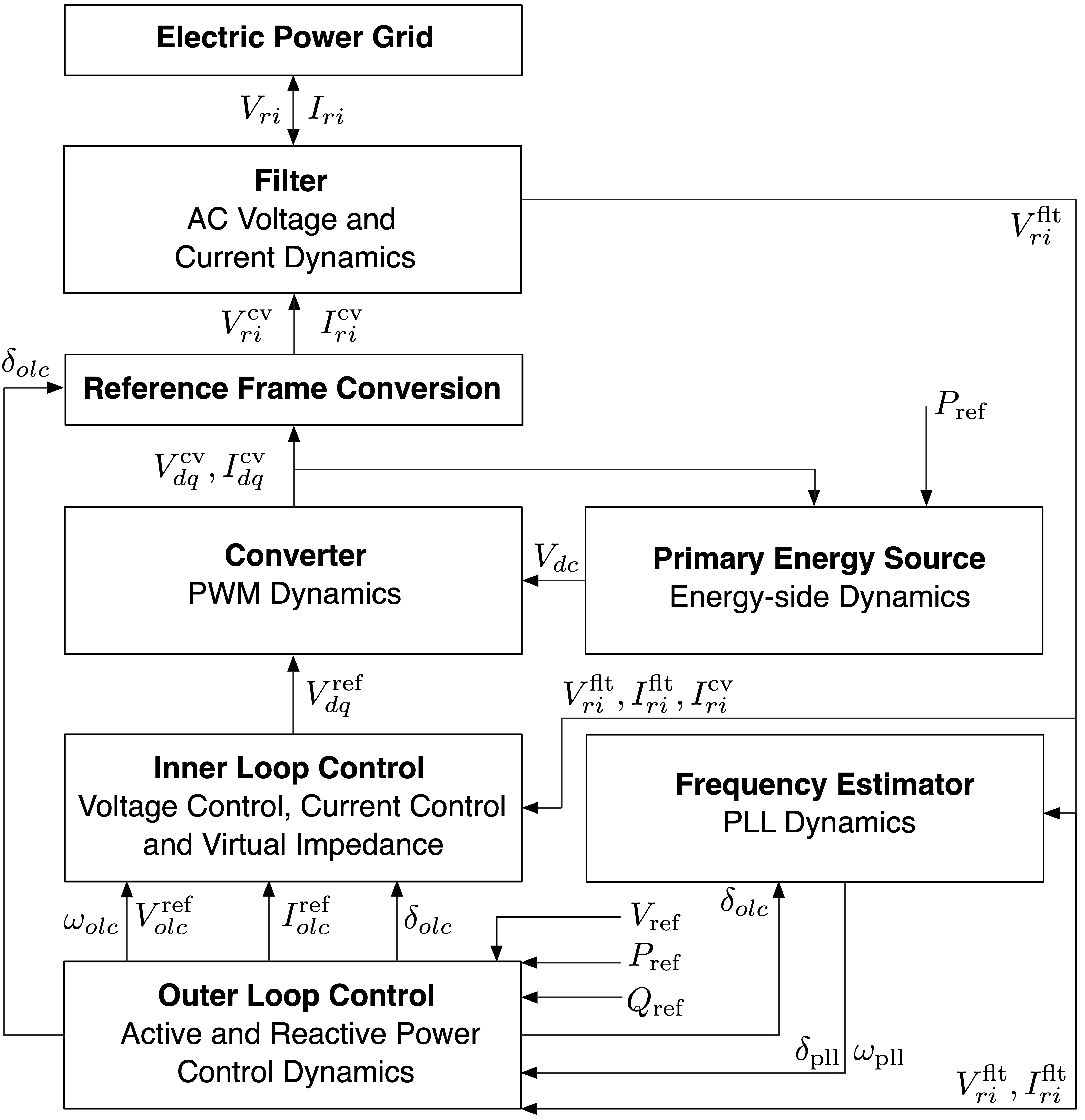
PowerSimulationsDynamics.inverter_inner_vars — TypeInverter Inner Vars:
md_var:: Modulation signal on the d-componentmq_var:: Modulation signal on the q-componentVdc_var:: DC voltage supplied by the DC sourceVr_filter_var:: Voltage seen in the capacitor of the filter in the R-componentVi_filter_var:: Voltage seen in the capacitor of the filter in the I-componentθ_freq_estimator_var:: Angle estimated by the frequency estimator.ω_freq_estimator_var:: Frequency estimated by the frequency estimator.V_oc_var:: Control voltage reference in the d-axis supplied from the outer loop control to the inner loop (for Voltage Mode Control)Id_oc_var:: Control current reference in the d-axis supplied from the outer loop control to the inner loop (for Current Mode Control)Iq_oc_var:: Control current reference in the q-axis supplied from the outer loop control to the inner loop (for Current Mode Control)Id_ic_var:: Control current reference in the d-axis supplied from the inner loop control to the converter (for Generic Models)Iq_ic_var:: Control current reference in the q-axis supplied from the inner loop control to the converter (for Generic Models)Ir_cnv_var:: Control current reference in the R-axis supplied from the converter to the filter (for Generic Models)Ii_cnv_var:: Control current reference in the I-axis supplied from the converter to the filter (for Generic Models)ω_oc_var:: Control frequency supplied from the outer loop control the inner loopθ_oc_var:: Variation of the angle (PLL or VSM) of the inverterVr_inv_var:: Real terminal voltage on the inverterVi_inv_var:: Imaginary terminal voltage on the inverterVr_cnv_var:: Voltage supplied from the converter in the R-componentVi_cnv_var:: Voltage supplied from the converter in the I-componentP_ES_var:: Power supplied from the Energy Source side
PowerSimulationsDynamics._field_current — MethodFunction to obtain the field current time series of a Dynamic Generator with machine type GENSAE.
PowerSimulationsDynamics._field_current — MethodFunction to obtain the field current time series of a Dynamic Generator with machine type GENSAL.
PowerSimulationsDynamics._field_current — MethodFunction to obtain the field current time series of a Dynamic Generator. It is dispatched via the machine type. By default, machine does not have support for field current
PowerSimulationsDynamics._field_current — MethodFunction to obtain the field current time series of a Dynamic Generator with machine type GENROU/GENROE.
PowerSimulationsDynamics._field_voltage — MethodFunction to obtain the field voltage time series of a Dynamic Generator with avr AVRFixed.
PowerSimulationsDynamics._field_voltage — MethodFunction to obtain the field voltage time series of a Dynamic Generator with avr ESST1A.
PowerSimulationsDynamics._field_voltage — MethodFunction to obtain the field voltage time series of a Dynamic Generator with avr SCRX.
PowerSimulationsDynamics._field_voltage — MethodFunction to obtain the field voltage time series of a Dynamic Generator with avr ESAC1A and EXAC1.
PowerSimulationsDynamics._field_voltage — MethodFunction to obtain the field voltage time series of a Dynamic Generator with avrs that have the field voltage as a state. By default it is assumed that the models have that state.
PowerSimulationsDynamics._frequency — MethodFunction to obtain the frequency time series of a droop grid forming inverter out of the DAE Solution. It is dispatched via the OuterControl type.
PowerSimulationsDynamics._frequency — MethodFunction to obtain the frequency time series of a VOC grid forming inverter out of the DAE Solution. It is dispatched via the OuterControl type.
PowerSimulationsDynamics._frequency — MethodFunction to obtain the frequency time series of a virtual inertia grid forming inverter out of the DAE Solution. It is dispatched via the OuterControl type.
PowerSimulationsDynamics._frequency — MethodFunction to obtain the frequency time series of a grid-following inverter with KauraPLL out of the DAE Solution. It is dispatched via the OuterControl and FrequencyEstimator type.
PowerSimulationsDynamics._frequency — MethodFunction to obtain the frequency time series of a grid-following inverter with ReducedOrderPLL out of the DAE Solution. It is dispatched via the OuterControl and FrequencyEstimator type.
PowerSimulationsDynamics._machine_current — MethodFunction to obtain the output current time series of a Classic Machine model out of the DAE Solution. It is dispatched via the machine type.
PowerSimulationsDynamics._machine_current — MethodFunction to obtain the output current time series of a One-D-One-Q model out of the DAE Solution. It is dispatched via the machine type.
PowerSimulationsDynamics._machine_current — MethodFunction to obtain the output current time series of a SauerPaiMachine model out of the DAE Solution. It is dispatched via the machine type.
PowerSimulationsDynamics._machine_current — MethodFunction to obtain the output current time series of a Marconato or AndersonFouad model out of the DAE Solution. It is dispatched via the machine type.
PowerSimulationsDynamics._machine_current — MethodFunction to obtain the output current time series of a GENROU/GENROE model out of the DAE Solution. It is dispatched via the machine type.
PowerSimulationsDynamics._machine_current — MethodFunction to obtain the output current time series of a GENSAL/GENSAE model out of the DAE Solution. It is dispatched via the machine type.
PowerSimulationsDynamics._machine_current — MethodFunction to obtain the output current time series of a SimpleMarconato or SimpleAndersonFouad model out of the DAE Solution. It is dispatched via the machine type.
PowerSimulationsDynamics._make_reduced_jacobian_index — MethodFinds the location of the differential states in the reduced Jacobian
PowerSimulationsDynamics._mechanical_torque — MethodFunction to obtain the mechanical torque time series of a Dynamic Generator with DEGOV Turbine Governor.
PowerSimulationsDynamics._mechanical_torque — MethodFunction to obtain the mechanical torque time series of a Dynamic Generator with GasTG (GAST) Turbine Governor.
PowerSimulationsDynamics._mechanical_torque — MethodFunction to obtain the mechanical torque time series of a Dynamic Generator with HydroTurbineGov (HYGOV) Turbine Governor.
PowerSimulationsDynamics._mechanical_torque — MethodFunction to obtain the mechanical torque time series of a Dynamic Generator with SteamTurbineGov1 (TGOV1) Turbine Governor.
PowerSimulationsDynamics._mechanical_torque — MethodFunction to obtain the mechanical torque time series of a Dynamic Generator with TGFixed Turbine Governor.
PowerSimulationsDynamics._mechanical_torque — MethodFunction to obtain the mechanical torque time series of a Dynamic Generator with TGTypeI Turbine Governor.
PowerSimulationsDynamics._mechanical_torque — MethodFunction to obtain the mechanical torque time series of a Dynamic Generator with TGTypeII Turbine Governor.
PowerSimulationsDynamics._output_current — MethodFunction to obtain the output current time series of a LCL Filter model out of the DAE Solution. It is dispatched via the Filter type.
PowerSimulationsDynamics._output_current — MethodFunction to obtain the output current time series of a REGCA converter model out of the DAE Solution. It is dispatched via the Converter type.
PowerSimulationsDynamics._post_proc_state_series — MethodInternal function to obtain as a Vector of Float64 of a specific state. It receives the solution and the global index for a state.
PowerSimulationsDynamics._pss_output — MethodFunction to obtain the pss output time series of a Dynamic Generator with pss IEEEST.
PowerSimulationsDynamics._pss_output — MethodFunction to obtain the pss output time series of a Dynamic Generator with pss PSSFixed.
PowerSimulationsDynamics.compute_field_current — MethodFunction to obtain the field current time series of a Dynamic Generator model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific current.
PowerSimulationsDynamics.compute_field_current — MethodFunction to obtain the field current time series of a Dynamic Inverter model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It must return nothing since field current does not exists in inverters.
PowerSimulationsDynamics.compute_field_voltage — MethodFunction to obtain the field voltage time series of a Dynamic Generator model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific voltage.
PowerSimulationsDynamics.compute_field_voltage — MethodFunction to obtain the field current time series of a Dynamic Inverter model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It must return nothing since field voltage does not exists in inverters.
PowerSimulationsDynamics.compute_frequency — MethodFunction to obtain the output frequency time series of a DynamicGenerator
PowerSimulationsDynamics.compute_mechanical_torque — MethodFunction to obtain the mechanical torque time series of a Dynamic Generator model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific torque.
PowerSimulationsDynamics.compute_mechanical_torque — MethodFunction to obtain the mechanical torque time series of a Dynamic Inverter model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It must return nothing since mechanical torque is not used in inverters.
PowerSimulationsDynamics.compute_output_current — MethodFunction to obtain the output current time series of a AggregateDistributedGenerationA (DERA) model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage.
PowerSimulationsDynamics.compute_output_current — MethodFunction to obtain the output current time series of a ExponentialLoad model.
PowerSimulationsDynamics.compute_output_current — MethodFunction to obtain the output current time series of a PeriodicVariableSource model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific current. computeoutputcurrent(::SimulationResults, ::PeriodicVariableSource, ::Vector{Float64}, ::Vector{Float64}, ::Nothing)
PowerSimulationsDynamics.compute_output_current — MethodFunction to obtain the output current time series of a PowerLoad model.
PowerSimulationsDynamics.compute_output_current — MethodFunction to obtain the output current time series of a 3th Order Induction Machine model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage.
PowerSimulationsDynamics.compute_output_current — MethodFunction to obtain the output current time series of a 5th Order Induction Machine model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage.
PowerSimulationsDynamics.compute_output_current — MethodFunction to obtain the output current time series of a PowerLoad model.
PowerSimulationsDynamics.compute_output_current — MethodFunction to obtain the output current time series of a Dynamic Generator model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific current.
PowerSimulationsDynamics.compute_output_current — MethodFunction to obtain the output current time series of a Dynamic Inverter model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific current.
PowerSimulationsDynamics.compute_output_current — MethodDefault function to compute output current. Returns an error
PowerSimulationsDynamics.compute_pss_output — MethodFunction to obtain the pss output time series of a Dynamic Generator model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific output.
PowerSimulationsDynamics.configure_logging — Methodconfigure_logging(;
+ console_level = Logging.Error,
+ file_level = Logging.Info,
+ filename = "power-simulations.log",
+)Creates console and file loggers.
Note: Log messages may not be written to the file until flush() or close() is called on the returned logger.
Arguments
console_level = Logging.Error: level for console messagesfile_level = Logging.Info: level for file messagesfilename::String = power-simulations.log: log file
Example
logger = configure_logging(console_level = Logging.Info)
+@info "log message"
+close(logger)PowerSimulationsDynamics.device! — MethodModel of 12-state Active Constant Power Load in Julia. Based on the paper Malicious Control of an Active Load in an Islanded Mixed-Source Microgrid by C. Roberts, U. Markovic, D. Arnold and D. Callaway.
PowerSimulationsDynamics.device! — MethodModel of Static Shunt Compensator: CSVGN1.
PowerSimulationsDynamics.device! — MethodModel of 3-state (SimplifiedSingleCageInductionMachine) induction motor in Julia. Based on the 3rd order model derived in Prabha Kundur's Book and the equations in "Analysis of Electric Machinery and Drive Systems" by Paul Krause, Oleg Wasynczuk and Scott Sudhoff.
PowerSimulationsDynamics.device! — MethodModel of 5-state (SingleCageInductionMachine) induction motor in Julia. Refer to "Analysis of Electric Machinery and Drive Systems" by Paul Krause, Oleg Wasynczuk and Scott Sudhoff for the equations
PowerSimulationsDynamics.initialize_mach_shaft! — MethodInitialitation of model of 6-state (Anderson-Fouad) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations
PowerSimulationsDynamics.initialize_mach_shaft! — MethodInitialitation of model of 0-state synchronous (classic model) machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations
PowerSimulationsDynamics.initialize_mach_shaft! — MethodInitialitation of model of 6-state (Marconato) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations
PowerSimulationsDynamics.initialize_mach_shaft! — MethodInitialitation of model of 2-state (One d- and One q-) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations
PowerSimulationsDynamics.initialize_mach_shaft! — MethodInitialitation of model of 6-state (SauerPai) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations
PowerSimulationsDynamics.initialize_mach_shaft! — MethodInitialitation of model of 4-state (Simple Anderson-Fouad) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations
PowerSimulationsDynamics.initialize_mach_shaft! — MethodInitialitation of model of 4-state (Simple Marconato) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations
PowerSimulationsDynamics.low_pass_modified_mass_matrix — MethodLow Pass Filter Modified ┌─────────────┐ │ K │ u -> │ ────────────│ -> y │ K_den + sT │ └─────────────┘
PowerSimulationsDynamics.mass_matrix_entries — MethodDefault implementation of mass matrix entries. Keeps the default values in the identity matrix
PowerSimulationsDynamics.mdl_machine_ode! — MethodModel of 6-state (AndersonFouadMachine) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations
PowerSimulationsDynamics.mdl_machine_ode! — MethodModel of 0-state synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations
PowerSimulationsDynamics.mdl_machine_ode! — MethodModel of 6-state (MarconatoMachine) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations
PowerSimulationsDynamics.mdl_machine_ode! — MethodModel of 2-state (One d- and One q-) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations
PowerSimulationsDynamics.mdl_machine_ode! — MethodModel of 6-state (SauerPaiMachine) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations
PowerSimulationsDynamics.mdl_machine_ode! — MethodModel of 4-state (SimpleAFMachine) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations
PowerSimulationsDynamics.mdl_machine_ode! — MethodModel of 4-state (SimpleMarconatoMachine) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations
PowerSimulationsDynamics.mdl_zip_load! — MethodModel for ZIP Load model given by:
Pzip = Ppower + Pcurrent * (V / V0) + Pimpedance * (V / V0)^2 Qzip = Qpower + Qcurrent * (V / V0) + Qimpedance * (V / V0)^2
with V = sqrt(Vr^2 + Vi^2) and V0 the voltage magnitude from the power flow solution
The current taken for the load is computed as: Izip = (Pzip + j Qzip)^* / (Vr + j Vi)^* Izip = (Pzip - j Qzip) / (Vr - j Vi)
For constant impedance it is obtained: Izre = (1 / V0)^2 * (Vr * Pimpedance + Vi * Qimpedance) Izim = (1 / V0)^2 * (Vi * Pimpedance - Vr * Qimpedance)
For constant current it is obtained: Iire = (1 / V0) * ( (Vr * Pcurrent + Vi * Qcurrent) / V ) Iiim = (1 / V0) * ( (Vi * Pcurrent - Vr * Qcurrent) / V )
For constant power it is obtained: Ipre = (Vr * Ppower + Vi * Qpower) / V^2 Ipim = (Vi * Ppower - Vr * Qpower) / V^2
Model for Exponential Load model given by:
Pexp = P0 * (V / V0)^α Qexp = Q0 * (V / V0)^β
The current taken for the load is computed as: Iexp = (Pexp + j Qexp)^* / (Vr + j Vi)^* Iexp = (Pexp - j Qexp) / (Vr - j Vi)
It results: Irexp = Vr * P0 * (V^(α - 2) / V0^α) + Vi * Q0 * (V^(β - 2)/ V0^β) Iiim = Vi * P0 * (V^(α - 2) / V0^α) - Vr * Q0 * (V^(β - 2)/ V0^β)
PowerSimulationsDynamics.post_proc_activepower_series — MethodFunction to compute the active power output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.
PowerSimulationsDynamics.post_proc_branch_series — MethodFunction to compute the current flowing through an AC branch through their series element. The current is computed through the from bus into the to bus.
PowerSimulationsDynamics.post_proc_field_current_series — MethodFunction to compute the field current output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.
PowerSimulationsDynamics.post_proc_field_voltage_series — MethodFunction to compute the field voltage output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.
PowerSimulationsDynamics.post_proc_frequency_series — MethodFunction to compute the frequency of a Dynamic Injection component.
PowerSimulationsDynamics.post_proc_imaginary_current_series — MethodFunction to compute the imaginary current output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.
PowerSimulationsDynamics.post_proc_mechanical_torque_series — MethodFunction to compute the mechanical torque output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.
PowerSimulationsDynamics.post_proc_pss_output_series — MethodFunction to compute the pss output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.
PowerSimulationsDynamics.post_proc_reactivepower_series — MethodFunction to compute the active power output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.
PowerSimulationsDynamics.post_proc_real_current_series — MethodFunction to compute the real current output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.
PowerSimulationsDynamics.post_proc_source_voltage_current_series — FunctionFunction to obtain voltage and output currents for a source. It receives the simulation resutls and an optional argument of the time step of the results.
PowerSimulationsDynamics.post_proc_state_series — MethodFunction to obtain the state time series of a specific state. It receives the simulation, and a tuple containing the name of the Dynamic Device and the symbol of the state.
PowerSimulationsDynamics.post_proc_voltage_current_series — MethodFunction to obtain voltage and output currents for a dynamic device. It receives the simulation, and the name of the Dynamic Device.
PowerSimulationsDynamics.post_proc_voltage_series — MethodFunction to obtain voltage using the bus index (and not the bus number). It receives the solution, the bus index and the total number of buses.
PowerSimulationsDynamics.saturation_function — MethodSaturation function for exponential saturation models for machines
+ Se(x) = B * x^APowerSimulationsDynamics.saturation_function — MethodSaturation function for quadratic saturation models for machines
+ Se(x) = B * (x - A)^2 / x









 ","category":"page"},{"location":"models/#Inverter-Models","page":"Models","title":"Inverter Models","text":"","category":"section"},{"location":"models/","page":"Models","title":"Models","text":"Here we discuss the structure and models used to model inverters in PowerSimulationsDynamics.jl. See PowerSystems.jl dynamic devices for details. One of the key contributions in this software package is a separation of the components in a way that resembles current practices for synchronoues machine modeling.","category":"page"},{"location":"models/","page":"Models","title":"Models","text":"DC Source: Defines the dynamics of the DC side of the converter.\nFrequency Estimator: That describes how the frequency of the grid can be estimated using the grid voltages. Typically a phase-locked loop (PLL).\nOuter Loop Control: That describes the active and reactive power control dynamics.\nInner Loop Control: That can describe virtual impedance, voltage control and current control dynamics.\nConverter: That describes the dynamics of the pulse width modulation (PWM) or space vector modulation (SVM).\nFilter: Used to connect the converter output to the grid.","category":"page"},{"location":"models/","page":"Models","title":"Models","text":"The following figure summarizes the components of a inverter and which variables they share:","category":"page"},{"location":"models/","page":"Models","title":"Models","text":"
","category":"page"},{"location":"models/#Inverter-Models","page":"Models","title":"Inverter Models","text":"","category":"section"},{"location":"models/","page":"Models","title":"Models","text":"Here we discuss the structure and models used to model inverters in PowerSimulationsDynamics.jl. See PowerSystems.jl dynamic devices for details. One of the key contributions in this software package is a separation of the components in a way that resembles current practices for synchronoues machine modeling.","category":"page"},{"location":"models/","page":"Models","title":"Models","text":"DC Source: Defines the dynamics of the DC side of the converter.\nFrequency Estimator: That describes how the frequency of the grid can be estimated using the grid voltages. Typically a phase-locked loop (PLL).\nOuter Loop Control: That describes the active and reactive power control dynamics.\nInner Loop Control: That can describe virtual impedance, voltage control and current control dynamics.\nConverter: That describes the dynamics of the pulse width modulation (PWM) or space vector modulation (SVM).\nFilter: Used to connect the converter output to the grid.","category":"page"},{"location":"models/","page":"Models","title":"Models","text":"The following figure summarizes the components of a inverter and which variables they share:","category":"page"},{"location":"models/","page":"Models","title":"Models","text":" ","category":"page"},{"location":"models/","page":"Models","title":"Models","text":"Contrary to the generator, there are many control structures that can be used to model inverter controllers (e.g. grid-following, grid feeding or virtual synchronous machine). For this purpose, more variables are shared among the components in order to cover all these posibilities.","category":"page"},{"location":"models/#Reference","page":"Models","title":"Reference","text":"","category":"section"},{"location":"models/","page":"Models","title":"Models","text":"For models, check the library in PowerSystems.jl","category":"page"},{"location":"component_models/avr/#Automatic-Voltage-Regulators-(AVR)","page":"AVR","title":"Automatic Voltage Regulators (AVR)","text":"","category":"section"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"AVR are used to determine the voltage in the field winding v_f (or V_f) in the model.","category":"page"},{"location":"component_models/avr/#Fixed-AVR-[AVRFixed]","page":"AVR","title":"Fixed AVR [AVRFixed]","text":"","category":"section"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"This is a simple model that set the field voltage to be equal to a desired constant value v_f = v_textfix.","category":"page"},{"location":"component_models/avr/#Simple-AVR-[AVRSimple]","page":"AVR","title":"Simple AVR [AVRSimple]","text":"","category":"section"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"This depicts the most basic AVR, on which the field voltage is an integrator over the difference of the measured voltage and a reference:","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign\ndotv_f = K_v(v_textref - v_h) tag1a\nendalign","category":"page"},{"location":"component_models/avr/#AVR-Type-I-[AVRTypeI]","page":"AVR","title":"AVR Type I [AVRTypeI]","text":"","category":"section"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"This AVR is a simplified version of the IEEE DC1 AVR model:","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign\ndotv_f = -frac1T_e left V_f(K_e + S_e(v_f))-v_r1 right tag2a \ndotv_r1 = frac1T_a left K_aleft(v_textref - v_m - v_r2 - fracK_fT_fv_fright) - v_r1 right tag2b \ndotv_r2 = -frac1T_f left fracK_fT_fv_f + v_r2 right tag2c \ndotv_m = frac1T_r (v_h - v_m) tag2d\nendalign","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"with the ceiling function:","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign*\nS_e(v_f) = A_e exp(B_ev_f)\nendalign*","category":"page"},{"location":"component_models/avr/#AVR-Type-II-[AVRTypeII]","page":"AVR","title":"AVR Type II [AVRTypeII]","text":"","category":"section"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"This model represents a static exciter with higher gains and faster response than the Type I:","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign\ndotv_f = -frac1T_e left V_f(1 + S_e(v_f))-v_r right tag3a \ndotv_r1 = frac1T_1 left K_0left(1 - fracT_2T_1 right)(v_textref - v_m) - v_r1 right tag3b \ndotv_r2 = frac1K_0 T_3 left left( 1 - fracT_4T_3 right) left( v_r1 + K_0fracT_2T_1(v_textref - v_m)right) - K_0 v_r2 right tag3c \ndotv_m = frac1T_r (v_h - v_m) tag3d\nendalign","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"with","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign*\nv_r = K_0v_r2 + fracT_4T_3 left( v_r1 + K_0fracT_2T_1(v_textref - v_m)right) \nS_e(v_f) = A_e exp(B_ev_f)\nendalign*","category":"page"},{"location":"component_models/avr/#Excitation-System-AC1A-[ESAC1A]","page":"AVR","title":"Excitation System AC1A [ESAC1A]","text":"","category":"section"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"The model represents the 5-states IEEE Type AC1A Excitation System Model:","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign\ndotV_m = frac1T_r (V_h - V_m) tag4a \ndotV_r1 = frac1T_b left(V_in left(1 - fracT_cT_bright) - V_r1right) tag4b \ndotV_r2 = frac1T_a (K_a V_out - V_r2) tag4c \ndotV_e = frac1T_e (V_r - V_FE) tag4d \ndotV_r3 = frac1T_f left( - fracK_fT_fV_FE - V_r3 right) tag4e \nendalign","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"with","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign*\nI_N = fracK_cV_e X_adI_fd \nV_FE = K_d X_adI_fd + K_e V_e + S_e V_e \nS_e = Bfrac(V_e-A)^2V_e \nV_F1 = V_r3 + fracK_fT_f V_FE \nV_in = V_ref - V_m - V_F1 \nV_out = V_r1 + fracT_cT_b V_in \nV_f = V_e f(I_N) \nf(I_N) = leftbeginarraycl\n 1 text if I_N le 0 \n 1 - 0577 I_N text if 0 I_N le 0433 \n sqrt075 - I_N^2 text if 0433 I_N le 075 \n 1732(1-I_N) text if 075 I_N le 1 \n 0 text if I_N 1 endarray right\nendalign*","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"on which X_adI_fd is the field current coming from the generator and V_h is the terminal voltage, and AB are the saturation coefficients computed using the E_1 E_2 S_e(E_1) S_e(E_2) data.","category":"page"},{"location":"component_models/avr/#Simplified-Excitation-System-[SEXS]","page":"AVR","title":"Simplified Excitation System [SEXS]","text":"","category":"section"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"The model for the 2 states excitation system SEXS:","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign\ndotV_f = frac1T_e (V_LL - V_f) tag5a \ndotV_r = frac1T_b leftleft(1 - fracT_aT_bright) V_in - V_r right tag5b\nendalign","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"with","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign*\nV_in = V_ref + V_s - V_h \nV_LL = V_r + fracT_aT_bV_in \nendalign*","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"on which V_h is the terminal voltage and V_s is the PSS output signal.","category":"page"},{"location":"component_models/avr/#Excitation-System-ST1-[EXST1]","page":"AVR","title":"Excitation System ST1 [EXST1]","text":"","category":"section"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"The model represents the 4-states IEEE Type ST1 Excitation System Model:","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign\ndotV_m = frac1T_r (V_h - V_m) tag6a \ndotV_rll = frac1T_b left(V_in left(1 - fracT_cT_bright) - V_rllright) tag6b \ndotV_r = frac1T_a (V_LL - V_r) tag6c \ndotV_fb = frac1T_f left( - fracK_fT_fV_r - V_fb right) tag6d \nendalign","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"with ","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign*\nV_in = V_ref - V_m - y_hp \nV_LL = V_r + fracT_cT_b V_in \ny_hp = V_fb + fracK_fT_f V_r \nV_f = V_r \nendalign*","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"on which V_h is the terminal voltage.","category":"page"},{"location":"component_models/avr/#Excitation-System-EXAC1-[EXAC1]","page":"AVR","title":"Excitation System EXAC1 [EXAC1]","text":"","category":"section"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"The model represents the 5-states IEEE Type EXAC1 Excitation System Model:","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign\ndotV_m = frac1T_r (V_h - V_m) tag7a \ndotV_r1 = frac1T_b left(V_in left(1 - fracT_cT_bright) - V_r1right) tag7b \ndotV_r2 = frac1T_a (K_a V_out - V_r2) tag7c \ndotV_e = frac1T_e (V_r - V_FE) tag7d \ndotV_r3 = frac1T_f left( - fracK_fT_fV_FE - V_r3 right) tag7e \nendalign","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"with","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign*\nI_N = fracK_cV_e X_adI_fd \nV_FE = K_d X_adI_fd + K_e V_e + S_e V_e \nS_e = Bfrac(V_e-A)^2V_e \nV_F1 = V_r3 + fracK_fT_f V_FE \nV_in = V_ref - V_m - V_F1 \nV_out = V_r1 + fracT_cT_b V_in \nV_f = V_e f(I_N) \nf(I_N) = leftbeginarraycl\n 1 text if I_N le 0 \n 1 - 0577 I_N text if 0 I_N le 0433 \n sqrt075 - I_N^2 text if 0433 I_N le 075 \n 1732(1-I_N) text if 075 I_N le 1 \n 0 text if I_N 1 endarray right\nendalign*","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"on which X_adI_fd is the field current coming from the generator and V_h is the terminal voltage, and AB are the saturation coefficients computed using the E_1 E_2 S_e(E_1) S_e(E_2) data.","category":"page"},{"location":"component_models/outer_control/#Outer-Loop-Controls","page":"Outer Control","title":"Outer Loop Controls","text":"","category":"section"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"This component defines controllers for both active and reactive power. The joint design is based on the fact that many novel control techniques can be based on joint control of active and reactive power.","category":"page"},{"location":"component_models/outer_control/#Virtual-Inertia-and-Q-droop-[OuterControl]","page":"Outer Control","title":"Virtual Inertia and Q-droop [OuterControl]","text":"","category":"section"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"The following model represent a virtual synchronous machine model to represent how active power is going to be deployed. The constructor is OuterControl{VirtualInertia, ReactivePowerDroop}. It defines a new SRF denoted as theta_textolc for the active power controller and uses a simple voltage droop for dispatching reactive power:","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n dotomega_textolc = fracp_textrefT_a - fracp_eT_a - frack_d(omega_textolc - omega_textpll)T_a - frack_omega(omega_textolc - omega_textref)T_a tag1a \n dottheta_textolc = Omega_b (omega_textolc - omega_textsys) tag1b \n dotq_m = omega_f (q_e - q_m) tag1c\nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"with","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n p_e = v_ri_r + v_ii_i tag1d \n q_e = v_ii_r - v_ri_i tag1e \n v_textolc^textref = v_textref + k_q(q_textref - q_m) tag1f\nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"In this case, the measurement of power are being done in the capacitor of the LCL filter. However, depending on the model, this measurements could be different depending on where is the point of common coupling.","category":"page"},{"location":"component_models/outer_control/#Active-Power-Droop-(P-droop)-and-Q-droop-[OuterControl]","page":"Outer Control","title":"Active Power Droop (P-droop) and Q-droop [OuterControl]","text":"","category":"section"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"The following model represent a Ptext-f droop model to represent how active power is going to be deployed. The constructor is OuterControl{ActivePowerDroop, ReactivePowerDroop}. It defines a new SRF denoted as theta_textolc for the active power controller and uses a simple voltage droop for dispatching reactive power. Both active and reactive power are measured via a low-pass filter:","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n dottheta_textolc = Omega_b (omega_textolc - omega_textsys) tag2a \n dotp_m = omega_z (p_e - p_m) tag2b \n dotq_m = omega_f (q_e - q_m) tag2c\nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"with","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n p_e = v_ri_r + v_ii_i tag2d \n q_e = v_ii_r - v_ri_i tag2e \n omega_textolc = omega_textref + R_p (p_textref - p_m) tag2f \n v_textolc^textref = v_textref + k_q(q_textref - q_m) tag2g\nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"In this case, the measurement of power are being done in the capacitor of the LCL filter. However, depending on the model, this measurements could be different depending on where is the point of common coupling.","category":"page"},{"location":"component_models/outer_control/#Active-and-Reactive-Virtual-Oscillator-Controllers-[OuterControl]","page":"Outer Control","title":"Active and Reactive Virtual Oscillator Controllers [OuterControl]","text":"","category":"section"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"The following model represents a Virtual Oscillator Controller for both active and reactive power to generate the voltage references that will be used in the Voltage Controller. The contructor is OuterControl{ActiveVirtualOscillator, ReactiveVirtualOscillator} It defines a new SRF denoted as theta_textolc and a voltage reference E_textolc. The equations are:","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n dottheta_textolc = Omega_b (omega_textolc - omega_textsys) tag3a \n dotE_olc = Omega_b left(frack_1E_oc (-sin(gamma) (p_textref - p_e) + cos(gamma)(q_textref - q_e)) + k_2 (V_textref - E_oc^2)E_oc right) tag3b \nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"with","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n gamma = psi - fracpi2 tag3c \n omega_textolc = omega_textsys + frack_1E_oc^2 left(cos(gamma) (p_textref - p_e) + sin(gamma)(q_textref - q_e) right) tag3d \n p_e = v_ri_r + v_ii_i tag3e \n q_e = v_ii_r - v_ri_i tag3f \nendalign","category":"page"},{"location":"component_models/outer_control/#Active-and-Reactive-Power-PI-Controllers-(Grid-Following)-[OuterControl]","page":"Outer Control","title":"Active and Reactive Power PI Controllers (Grid Following) [OuterControl]","text":"","category":"section"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"The following model represents a PI controller for both active and reactive power to generate the current references that will be used in the Current Controller of the inner control CurrentModeControl. The constructor is OuterControl{ActivePowerPI, ReactivePowerPI}. The equations are:","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n dotsigma_p = p_textref - p_m tag4a \n dotp_m = omega_z (p_e - p_m) tag4b \n dotsigma_q = q_textref - q_m tag4c \n dotq_m = omega_f (q_e - p_m) tag4d \nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"with","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n p_e = v_ri_r + v_ii_i tag4e \n q_e = v_ii_r - v_ri_i tag4f \n omega_textolc = omega_textpll tag4g \n theta_textolc = theta_textpll tag4h \n i_textdcv^textref = k_p^q (q_textref - q_m) + k_i^q sigma_q tag4i \n i_textqcv^textref = k_p^p (p_textref - p_m) + k_i^p sigma_p tag4j \nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"This models requires a PLL to have a SRF for an internal dq reference frame. Contrary to the Grid-Forming model, it cannot work without a PLL. Since this Outer Control outputs a current reference, it can only be used with a current mode inner control (i.e. that receives a current reference instead of a voltage reference).","category":"page"},{"location":"component_models/outer_control/#Active-and-Reactive-Generic-Renewable-Controller-Type-AB-[OuterControl]","page":"Outer Control","title":"Active and Reactive Generic Renewable Controller Type AB [OuterControl]","text":"","category":"section"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"The following model represents an outer controller for both active and reactive power from generic industrial models REPCA and REECB to generate the current references that will be used in the Current Controller of the inner control RECurrentControlB. The constructor is OuterControl{ActiveRenewableControllerAB, ReactiveRenewableControllerAB}. The equations will depend on the flags used.","category":"page"},{"location":"component_models/outer_control/#Active-part","page":"Outer Control","title":"Active part","text":"","category":"section"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"In the case of F_Flag = 1 the equations (without limits and freezing) are:","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n dotp_textflt = frac1T_p (p_e - p_textflt) tag5a \n dotxi_P = p_texterr tag5b \n dotp_textext = frac1T_g (K_pg p_texterr + K_ig xi_P) tag5c \n dotp_textord = frac1T_textpord (p_textext - p_textord) tag5d\nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"with","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n p_e = v_ri_r + v_ii_i tag5e \n p_texterr = p_textref + p_textdroop - p_textflt tag5f \nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"In the case of F_Flag = 0 the equations (without limits) are simply","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n dotp_textord = frac1T_textpord (p_textref - p_textord) tag5g\nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"The current command going to the Inner Loop is computed as:","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n I_textocpcmd = fracp_textordV_texttflt tag5h\nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"on which V_texttflt is the filtered terminal bus voltage coming from the inner controller.","category":"page"},{"location":"component_models/outer_control/#Reactive-part","page":"Outer Control","title":"Reactive part","text":"","category":"section"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"In the case of VC_Flag = 0, Ref_Flag = 0, PF_Flag = 0, V_Flag = 1 the equations (without limits and freezing) are:","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n dotq_textflt = frac1T_textfltr (q_e - q_textflt) tag5i \n dotxi_textqoc = q_texterr tag5j \n dotq_LL = frac1T_fv(Q_textpi ( 1 - T_ftT_fv) - q_LL) tag5k \n dotxi_Q = V_textpiin tag5l \nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"with","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n q_e = v_ii_r - v_ri_i tag5m \n q_texterr = q_textref - q_flt tag5n \n Q_textpi = K_p q_texterr + K_i xi_textqoc tag5o \n Q_textext = q_LL + fracT_ftT_fv Q_textpi tag5p \n V_textpiin = Q_textext - q_e tag5q \nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"The output to the inner controller are V_textocqcmd if the Q_Flag = 1 on the Inner Controller, or I_textocqcmd if Q_Flag = 0:","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n V_textocqcmd = (K_qp V_textpiin + K_qi xi_Q) - V_texttflt tag5r \n I_textocqmcd = fracQ_textextmax(V_texttflt 001) tag5s\nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"In the case of VC_Flag = 0, Ref_Flag = 0, PF_Flag = 0, V_Flag = 1 the equations (without limits and freezing) are:","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n dotq_textflt = frac1T_textfltr (q_e - q_textflt) tag5t \n dotxi_textqoc = q_texterr tag5u \n dotq_LL = frac1T_fv(Q_textpi ( 1 - T_ftT_fv) - q_LL) tag5v \nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"The remaining models for other flags will be included when implemented in PowerSimulationsDynamics.jl.","category":"page"},{"location":"perturbations/#Perturbations","page":"Perturbations","title":"Perturbations","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Perturbations are used to alter the system from its steady state operation. If a Simulation is properly initialized, all states will remain fixed in their initial condition if no perturbation is applied to the system.","category":"page"},{"location":"perturbations/#List-of-perturbations","page":"Perturbations","title":"List of perturbations","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"NetworkSwitch: allows to modify directly the admittance matrix, Ybus, used in the Simulation.\nBranchTrip: completely disconnects a branch from the system.\nBranchImpedanceChange: change the impedance of a branch by a user defined multiplier. \nGeneratorTrip: allows to disconnect a Dynamic Generation unit from the system.\nControlReferenceChange: allows to change the reference setpoint provided by a generator/inverter.\nLoadChange: allows to change the active or reactive power setpoint from a load.\nLoadTrip: allows the user to disconnect a load from the system.\nSourceBusVoltageChange: allows to change the reference setpoint provided by a voltage source.","category":"page"},{"location":"perturbations/#Examples","page":"Perturbations","title":"Examples","text":"","category":"section"},{"location":"perturbations/#Example-1:-Circuit-Disconnection-using-NetworkSwitch","page":"Perturbations","title":"Example 1: Circuit Disconnection using NetworkSwitch","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Consider a two bus system connected via a double circuit line, on which each circuit has parameters, r = 0.0, x = 0.1, b = 0.0 per unit, then the admittance matrix of the original system is given by:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"yb = [0.0 - 20.0im 0.0 + 20.0im\n 0.0 + 20.0im 0.0 - 20.0im]","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Triping one circuit can be modeled by doubling the impedance, i.e., dividing by 2 the admittance:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"new_yb = [0.0 - 10.0im 0.0 + 10.0im\n 0.0 + 10.0im 0.0 - 10.0im]","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"To apply a Network Switch, we require to use a sparse matrix, so we can do this by simply:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"using SparseArrays\nnew_yb = sparse(new_yb)","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Then, this perturbation ocurring at t = 10 seconds can be included as:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"ns1 = NetworkSwitch(1.0, new_yb)","category":"page"},{"location":"perturbations/#Example-2:-Three-Phase-Fault-using-NetworkSwitch","page":"Perturbations","title":"Example 2: Three Phase Fault using NetworkSwitch","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Another perturbation that can be modeled is a three phase fault at Bus 1 with impedance r_f = 0.0001, x_f = 0.0 per unit, then the admittance of this new system is:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"new_yb2 = [10000.0 - 20.0im 0.0 + 20.0im\n 0.0 + 20.0im 0.0 - 20.0im]","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Then, this perturbation ocurring at t = 10 seconds can be included as:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"new_yb2 = sparse(new_yb2)\nns2 = NetworkSwitch(1.0, new_yb2)","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Now, consider that the fault is cleared at t = 105 seconds by disconnecting the Circuit 2 of the line. This can be modeled with the single circuit admittance matrix:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"new_yb3 = [0.0 - 10.0im 0.0 + 10.0im\n 0.0 + 10.0im 0.0 - 10.0im]","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"and the perturbation as:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"new_yb3 = sparse(new_yb3)\nns3 = NetworkSwitch(1.05, new_yb3)","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Then, the entire perturbation for the Simulation can be included in a vector of perturbations as:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"three_fault = [ns2, ns3]","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"that can be passed as a perturbation argument in the Simulation construction.","category":"page"},{"location":"perturbations/#Example-3:-BranchTrip","page":"Perturbations","title":"Example 3: BranchTrip","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Consider the following 2 bus system defined by:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"buses = [\n Bus(1, \"nodeA\", \"REF\", 0, 1.0, (min = 0.9, max = 1.05), 230, nothing, nothing),\n Bus(2, \"nodeB\", \"PV\", 0, 1.0, (min = 0.9, max = 1.05), 230, nothing, nothing),\n]\n\nline1 = Line(\n \"Circuit1\",\n true,\n 0.0,\n 0.0,\n Arc(from = buses[1], to = buses[2]),\n 0.00,\n 0.1,\n (from = 0.0, to = 0.0),\n 2.0,\n (min = -0.7, max = 0.7),\n )\nline2 = Line(\n \"Circuit2\",\n true,\n 0.0,\n 0.0,\n Arc(from = buses[1], to = buses[2]),\n 0.0,\n 0.1,\n (from = 0.0, to = 0.0),\n 2.0,\n (min = -0.7, max = 0.7),\n )\n\nsys = System(100.0, buses, [], [], [line1, line2])","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"A Branch Trip of Circuit 2 at time t = 10 seconds, can be implemented as:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"b_trip = BranchTrip(1.0, Line, \"Circuit2\")","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Note: Islanding is currently not supported in PowerSimulationsDynamics.jl. If a BranchTrip isolates a generation unit, the system may diverge due to the isolated generator.","category":"page"},{"location":"perturbations/#Example-4:-BranchImpedanceChange","page":"Perturbations","title":"Example 4: BranchImpedanceChange","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Following the same example as before, it is possible to amplify the impedance of a single circuit by 2.0 (that would represent that this Circuit is actually composed by 2 circuits) using the following perturbation:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"b_change = BranchImpedanceChange(1.0, Line, \"Circuit2\", 2.0)","category":"page"},{"location":"perturbations/#Example-5:-GeneratorTrip","page":"Perturbations","title":"Example 5: GeneratorTrip","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Consider that you have a generator at bus 102, named \"generator-102-1\" in your system called sys. The constructor to trip it from the system is:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"g = get_component(DynamicGenerator, sys, \"generator-102-1\")\ng_trip = GeneratorTrip(1.0, g)","category":"page"},{"location":"perturbations/#Example-6:-ControlReferenceChange","page":"Perturbations","title":"Example 6: ControlReferenceChange","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Consider that you have a generator at bus 102, named \"generator-102-1\" in your system called sys. The constructor to change is active power reference to 0.5 is:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"g = get_component(DynamicGenerator, sys, \"generator-102-1\")\ncrc = ControlReferenceChange(1.0, g, :P_ref, 0.5)","category":"page"},{"location":"perturbations/#Example-7:-LoadChange","page":"Perturbations","title":"Example 7: LoadChange","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Consider that you have a load at bus 103, named \"load-103-1\" in your system called sys. The constructor to change is active power reference to 0.8 per unit at t = 10 seconds is:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"l_device = get_component(ElectricLoad, sys, \"load-103-1\")\nl_change = LoadChange(1.0, l_device, :P_ref, 0.8)","category":"page"},{"location":"perturbations/#Example-8:-LoadTrip","page":"Perturbations","title":"Example 8: LoadTrip","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Consider that you have a load at bus 103, named \"load-103-1\" in your system called sys. The constructor to disconnect such load at t = 10 seconds is:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"l_device = get_component(ElectricLoad, sys, \"load-103-1\")\nl_trip = LoadTrip(1.0, l_device)","category":"page"},{"location":"perturbations/#Example-9:-SourceBusVoltageChange","page":"Perturbations","title":"Example 9: SourceBusVoltageChange","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Consider that you have a voltage source at bus 101, named \"source-101-1\" in your system called sys. The constructor to change is voltage magnitude reference to 1.02 per unit at t = 10 seconds is:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"s_device = get_component(Source, sys, \"source-101-1\")\ns_change = SourceBusVoltageChange(1.0, s_device, 1, 1.02)","category":"page"},{"location":"component_models/machines/#Machines","page":"Machine","title":"Machines","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"The machine component describes the stator-rotor electromagnetic dynamics.","category":"page"},{"location":"component_models/machines/#Classical-Model-(Zero-Order)-[BaseMachine]","page":"Machine","title":"Classical Model (Zero Order) [BaseMachine]","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"This is the classical order model that does not have differential equations in its machine model (delta and omega are defined in the shaft):","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\n left beginarrayc i_d i_q endarray right = left beginarraycc r_a -x_d x_d r_a endarray right^-1 left beginarrayc -v_d e_q - v_q endarray right tag1a\np_e approx tau_e = (v_q + r_a i_q)i_q + (v_d + r_ai_d)i_d tag1b\nendalign","category":"page"},{"location":"component_models/machines/#One-d-One-q-Model-(2nd-Order)-[OneDOneQMachine]","page":"Machine","title":"One d- One q- Model (2nd Order) [OneDOneQMachine]","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"This model includes two transient emf with their respective differential equations:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ndote_q = frac1T_d0 left-e_q + (x_d-x_d)i_d + v_fright tag2a\ndote_d = frac1T_q0 left-e_d + (x_q-x_q)i_q right tag2b\n left beginarrayc i_d i_q endarray right = left beginarraycc r_a -x_q x_d r_a endarray right^-1 left beginarrayc e_d-v_d e_q - v_q endarray right tag2c\np_e approx tau_e = (v_q + r_a i_q)i_q + (v_d + r_ai_d)i_d tag2d\nendalign","category":"page"},{"location":"component_models/machines/#Marconato-Machine-(6th-Order)-[MarconatoMachine]","page":"Machine","title":"Marconato Machine (6th Order) [MarconatoMachine]","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"The Marconato model defines 6 differential equations, two for stator fluxes and 4 for transient and subtransient emfs:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ndotpsi_d = Omega_b(r_ai_d + omega psi_q + v_d) tag3a \ndotpsi_q = Omega_b(r_ai_q - omega psi_d + v_q) tag3b \ndote_q = frac1T_d0 left-e_q - (x_d-x_d-gamma_d)i_d + left(1- fracT_AAT_d0 right) v_fright tag3c\ndote_d = frac1T_q0 left-e_d + (x_q-x_q-gamma_q)i_q right tag3d\ndote_q = frac1T_d0 left-e_q + e_q - (x_d-x_d+gamma_d)i_d + fracT_AAT_d0v_f right tag3e \ndote_d = frac1T_q0 left-e_d + e_d + (x_q-x_q+gamma_q)i_q right tag3f \ni_d = frac1x_d (e_q - psi_d) tag3g \ni_q = frac1x_q (-e_d - psi_q) tag3h \ntau_e = psi_d i_q - psi_q i_d tag3i\nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"with","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign*\n gamma_d = fracT_d0 x_dT_d0 x_d (x_d - x_d) \n gamma_q = fracT_q0 x_qT_q0 x_q (x_q - x_q)\nendalign*","category":"page"},{"location":"component_models/machines/#Simplified-Marconato-Machine-(4th-Order)-[SimpleMarconatoMachine]","page":"Machine","title":"Simplified Marconato Machine (4th Order) [SimpleMarconatoMachine]","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"This model neglects the derivative of stator fluxes (dotpsi_d and dotpsi_q) and assume that the rotor speed stays close to 1 pu (omegapsi_d=psi_d and omegapsi_q=psi_q) that allows to remove the stator fluxes variables from the Marconato model.","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ndote_q = frac1T_d0 left-e_q - (x_d-x_d-gamma_d)i_d + left(1- fracT_AAT_d0 right) v_fright tag4a\ndote_d = frac1T_q0 left-e_d + (x_q-x_q-gamma_q)i_q right tag4b\ndote_q = frac1T_d0 left-e_q + e_q - (x_d-x_d+gamma_d)i_d + fracT_AAT_d0v_f right tag4c \ndote_d = frac1T_q0 left-e_d + e_d + (x_q-x_q+gamma_q)i_q right tag4d \nleft beginarrayc i_d i_q endarray right = left beginarraycc r_a -x_q x_d r_a endarray right^-1 left beginarrayc e_d-v_d e_q - v_q endarray right tag4e\np_e approx tau_e = (v_q + r_a i_q)i_q + (v_d + r_ai_d)i_d tag4f\nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"with","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign*\n gamma_d = fracT_d0 x_dT_d0 x_d (x_d - x_d) \n gamma_q = fracT_q0 x_qT_q0 x_q (x_q - x_q)\nendalign*","category":"page"},{"location":"component_models/machines/#Anderson-Fouad-Machine-(6th-Order)-[AndersonFouadMachine]","page":"Machine","title":"Anderson-Fouad Machine (6th Order) [AndersonFouadMachine]","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"The Anderson-Fouad model also defines 6 differential equations, two for stator fluxes and 4 for transient and subtransient emfs and is derived from the Marconato model by defining gamma_d approx gamma_q approx T_AA approx 0:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ndotpsi_d = Omega_b(r_ai_d + omega psi_q + v_d) tag5a \ndotpsi_q = Omega_b(r_ai_q - omega psi_d + v_q) tag5b \ndote_q = frac1T_d0 left-e_q - (x_d-x_d)i_d + v_fright tag5c\ndote_d = frac1T_q0 left-e_d + (x_q-x_q)i_q right tag5d\ndote_q = frac1T_d0 left-e_q + e_q - (x_d-x_d)i_d right tag5e \ndote_d = frac1T_q0 left-e_d + e_d + (x_q-x_q)i_q right tag5f \ni_d = frac1x_d (e_q - psi_d) tag5g \ni_q = frac1x_q (-e_d - psi_q) tag5h \ntau_e = psi_d i_q - psi_q i_d tag5i\nendalign","category":"page"},{"location":"component_models/machines/#Simplified-Anderson-Fouad-Machine-(4th-Order)-[SimpleAFMachine]","page":"Machine","title":"Simplified Anderson-Fouad Machine (4th Order) [SimpleAFMachine]","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"Similar to the Simplified Marconato Model, this model neglects the derivative of stator fluxes (dotpsi_d and dotpsi_q) and assume that the rotor speed stays close to 1 pu (omega psi_d = psi_d and omega psi_q = psi_q) that allows to remove the stator fluxes variables from the model:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ndote_q = frac1T_d0 left-e_q - (x_d-x_d)i_d + v_fright tag6a\ndote_d = frac1T_q0 left-e_d + (x_q-x_q)i_q right tag6b\ndote_q = frac1T_d0 left-e_q + e_q - (x_d-x_d)i_d right tag6c \ndote_d = frac1T_q0 left-e_d + e_d + (x_q-x_q)i_q right tag6d \nleft beginarrayc i_d i_q endarray right = left beginarraycc r_a -x_q x_d r_a endarray right^-1 left beginarrayc e_d-v_d e_q - v_q endarray right tag6e\np_e approx tau_e = (v_q + r_a i_q)i_q + (v_d + r_ai_d)i_d tag6f\nendalign","category":"page"},{"location":"component_models/machines/#Round-Rotor-Machine-(4th-Order)-[RoundRotorQuadratic,-RoundRotorExponential]","page":"Machine","title":"Round Rotor Machine (4th Order) [RoundRotorQuadratic, RoundRotorExponential]","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"This model represents the traditional round rotor models GENROU/GENROE models implemented in PSLF/PSSE/PowerWorld. Similar to the Simplified Marconato Model, this model neglects the derivative of stator fluxes (dotpsi_d and dotpsi_q). Round rotor machines must satisfy x_d = x_q.","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ndote_q = frac1T_d0 leftv_f - X_adI_fdright tag7a\ndote_d = frac1T_q0 left-X_aqI_1q right tag7b\ndotpsi_kd = frac1T_d0 left-psi_kd + e_q - (x_d-x_l)i_d right tag7c \ndotpsi_kq = frac1T_q0 left-psi_kq + e_d + (x_q-x_l)i_q right tag7d \nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"with:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ngamma_d1 = fracx_d - x_lx_d - x_l tag7e\ngamma_q1 = fracx_q - x_lx_q - x_l tag7f\ngamma_d2 = fracx_d - x_d(x_d-x_l)^2 tag7g\ngamma_q2 = fracx_q - x_q(x_q - x_l)^2 tag7h\ngamma_qd = fracx_q - x_lx_d - x_l tag7i\npsi_q = gamma_q1 e_d + psi_kq (1 - gamma_q1) tag7j\npsi_d = gamma_d1 e_q + gamma_d2 (x_d - x_l) psi_kd tag7k\npsi = sqrt(psi_d)^2 + (psi_q)^2 tag7l\nleft beginarrayc i_d i_q endarray right = left beginarraycc -r_a x_q -x_d r_a endarray right^-1 left beginarrayc v_d - psi_q -v_q + psi_d endarray right tag7m\nX_adI_fd = e_q + (x_d - x_d) (gamma_d1 i_d - gamma_d2 psi_kd + gamma_d2 + e_q) + textSe(psi) psi_d tag7n\nX_aqI_1q = e_d + (x_q - x_q) (gamma_q2 e_d - gamma_q2psi_kq - gamma_q1 i_q) + textSe(psi) psi_q gamma_qd tag7o \ntau_e = i_d (r_a i_d + v_d) + i_q(r_a i_q + v_q) tag7p\nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"The difference between GENROU and GENROE occurs in which additive saturation function textSe(psi) is used. Input data is provided by the saturation values at psi = 10 and psi = 12 p.u. For the GENROU model, the function used is:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ntextSe(psi) = fracB(psi - A)^2 psi tag7q\nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"and for the GENROE model the function used is:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ntextSe(psi) = B(psi)^A tag7r\nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"The parameters A and B for each function are computed using the two points given (10 textSe(10)) and (12 textSe(12)).","category":"page"},{"location":"component_models/machines/#Salient-Pole-Machine-(3rd-Order)-[SalientPoleQuadratic,-SalientPoleExponential]","page":"Machine","title":"Salient Pole Machine (3rd Order) [SalientPoleQuadratic, SalientPoleExponential]","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"This model represents the traditional round rotor models GENSAL/GENSAE models implemented in PSLF/PSSE/PowerWorld. Similar to the GENROU Model, this model neglects the derivative of stator fluxes (dotpsi_d and dotpsi_q).","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ndote_q = frac1T_d0 leftv_f - X_adI_fdright tag8a\ndotpsi_kd = frac1T_d0 left-psi_kd + e_q - (x_d-x_l)i_d right tag8b \ndotpsi_q = frac1T_q0 left-psi_q - (x_q-x_q)i_q right tag8c \nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"with:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ngamma_d1 = fracx_d - x_lx_d - x_l tag8d\ngamma_q1 = fracx_q - x_lx_q - x_l tag8e\ngamma_d2 = fracx_d - x_d(x_d-x_l)^2 tag8f\npsi_d = gamma_d1 e_q + gamma_q1 psi_kd tag8g\nleft beginarrayc i_d i_q endarray right = left beginarraycc -r_a x_q -x_d r_a endarray right^-1 left beginarrayc v_d - psi_q -v_q + psi_d endarray right tag8h\nX_adI_fd = e_q + textSe(e_q) e_q + (x_d - x_d) (i_d + gamma_d2 (e_q - psi_kd - (x_d - x_l)i_d) tag8i\ntau_e = i_d (r_a i_d + v_d) + i_q(r_a i_q + v_q) tag8j\nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"The difference between GENSAL and GENSAE occurs in which additive saturation function textSe(e_q) is used. Input data is provided by the saturation values at e_q = 10 and e_q = 12 p.u. For the GENSAL model, the function used is:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ntextSe(e_q) = fracB(e_q - A)^2 e_q tag8k\nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"and for the GENSAE model the function used is:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ntextSe(e_q) = B(e_q)^A tag8l\nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"The parameters A and B for each function are computed using the two points given (10 textSe(10)) and (12 textSe(12)).","category":"page"},{"location":"component_models/machines/#SauerPai-Machine-(6th-Order)-[SauerPaiMachine]","page":"Machine","title":"SauerPai Machine (6th Order) [SauerPaiMachine]","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"The Sauer Pai model defines 6 differential equations as follows:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ndotpsi_d = Omega_b(r_ai_d + omega psi_q + v_d) tag9a \ndotpsi_q = Omega_b(r_ai_q - omega psi_d + v_q) tag9b \ndote_q = frac1T_d0 left(-e_q - (x_d - x_d)(i_d + gamma_d2 cdot dotpsi_d) + v_f)right tag9c\ndote_q = frac1T_q0 left(-e_d + (x_q - x_q)(i_q + gamma_q2 cdot dotpsi_q))right tag9d\ndotpsi_d = frac1T_d0 left(-psi_d + e_q - (x_d - x_l)cdot i_d)right tag9e \ndotpsi_q = frac1T_q0 left(-psi_q - e_d - (x_q - x_l)cdot i_q)right tag9f \ni_d = frac1x_d (gamma_d1 cdot e_q - psi_d + (1 - gamma_d1) * psi_d) tag9g \ni_q = frac1x_q ((-gamma_q1 cdot e_d - psi_q + (1 - gamma_q1) cdot psi_q) tag9h \ntau_e = psi_d i_q - psi_q i_d tag9i\nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"with","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign*\n gamma_d1 = fracx_d - x_lx_d - x_l \n gamma_q1 = fracx_q - x_lx_q - x_l \n gamma_d2 = frac1 - gamma_d1x_d - x_l \n gamma_q2 = frac1 - gamma_q1x_q - x_l\nendalign*","category":"page"},{"location":"component_models/shafts/#Shafts","page":"Shaft","title":"Shafts","text":"","category":"section"},{"location":"component_models/shafts/","page":"Shaft","title":"Shaft","text":"The shaft component defines the rotating mass of the synchronous generator.","category":"page"},{"location":"component_models/shafts/#Rotor-Mass-Shaft-[SingleMass]","page":"Shaft","title":"Rotor Mass Shaft [SingleMass]","text":"","category":"section"},{"location":"component_models/shafts/","page":"Shaft","title":"Shaft","text":"This is the standard model, on which one single mass (typically the rotor) is used to model the entire inertia of the synchronous generator. Each generator's rotating frame use a reference frequency omega_s, that typically is the synchronous one (i.e. omega_s = 10). The model defines two differential equations for the rotor angle delta and the rotor speed omega:","category":"page"},{"location":"component_models/shafts/","page":"Shaft","title":"Shaft","text":"beginalign\ndotdelta = Omega_b(omega - omega_s) tag1a \ndotomega = frac12H(tau_m - tau_e - D(omega-omega_s)) tag1b\nendalign","category":"page"},{"location":"component_models/shafts/#Five-Mass-Shaft-[FiveMassShaft]","page":"Shaft","title":"Five-Mass Shaft [FiveMassShaft]","text":"","category":"section"},{"location":"component_models/shafts/","page":"Shaft","title":"Shaft","text":"This model describes model connecting a high-pressure (hp) steam turbine, intermediate-pressure (ip) steam turbine, low-pressure (lp) steam pressure, rotor and exciter (ex) connected in series (in that order) in the same shaft using a spring-mass model:","category":"page"},{"location":"component_models/shafts/","page":"Shaft","title":"Shaft","text":"beginalign\ndotdelta = Omega_b(omega - omega_s) tag2a \ndotomega = frac12H left- tau_e - D(omega-omega_s)) - D_34 (omega-omega_lp) - D_45(omega-omega_ex) + K_lp(delta_lp-delta) +K_ex(delta_ex-delta) right tag2b \ndotdelta_hp = Omega_b(omega_hp - omega_s) tag2c \ndotomega_hp = frac12H_hp left tau_m - D_hp(omega_hp-omega_s) - D_12(omega_hp - omega_ip) + K_hp(delta_ip - delta_hp) right tag2d \ndotdelta_ip = Omega_b(omega_ip - omega_s) tag2e \ndotomega_ip = frac12H_ip left- D_ip(omega_ip-omega_s) - D_12(omega_ip - omega_hp) -D_23(omega_ip - omega_lp ) + K_hp(delta_hp - delta_ip) + K_ip(delta_lp-delta_ip) right tag2f \ndotdelta_lp = Omega_b(omega_lp-omega_s) tag2g \ndotomega_lp = frac12H_lp left - D_lp(omega_lp-omega_s) - D_23(omega_lp - omega_ip) -D_34(omega_lp - omega ) + K_ip(delta_ip - delta_lp) + K_lp(delta-delta_lp) right tag2h \ndotdelta_ex = Omega_b(omega_ex-omega_s) tag2i \ndotomega_ex = frac12H_ex left - D_ex(omega_ex-omega_s) - D_45(omega_ex - omega) + K_ex(delta - delta_ex) right tag2j\nendalign","category":"page"},{"location":"api/public/#PowerSimulationsDynamics","page":"Public API Reference","title":"PowerSimulationsDynamics","text":"","category":"section"},{"location":"api/public/","page":"Public API Reference","title":"Public API Reference","text":"CurrentModule = PowerSimulationsDynamics\nDocTestSetup = quote\n using PowerSimulationsDynamics\nend","category":"page"},{"location":"api/public/","page":"Public API Reference","title":"Public API Reference","text":"Modules = [PowerSimulationsDynamics]\nPublic = true\nPrivate = false","category":"page"},{"location":"api/public/#PowerSimulationsDynamics.BranchImpedanceChange","page":"Public API Reference","title":"PowerSimulationsDynamics.BranchImpedanceChange","text":"mutable struct BranchImpedanceChange <: Perturbation\n time::Float64\n branch_type::Type{<:PSY.ACBranch}\n branch_name::String\n multiplier::Float64\nend\n\nA BranchImpedanceChange change the impedance of a branch by a user defined multiplier. Currently there is only support for static branches disconnection, PowerSystems.Line and PowerSystems.Transformer2W. Future releases will provide support for a Dynamic Line disconnection.\n\nArguments:\n\ntime::Float64 : Defines when the Branch Impedance Change will happen. This time should be inside the time span considered in the Simulation\nbranch_tipe::Type{<:PowerSystems.ACBranch} : Type of branch modified\nbranch_name::String : User defined name for identifying the branch\nmultiplier::Float64 : User defined value for impedance multiplier.\n\n\n\n\n\n","category":"type"},{"location":"api/public/#PowerSimulationsDynamics.BranchTrip","page":"Public API Reference","title":"PowerSimulationsDynamics.BranchTrip","text":"mutable struct BranchTrip <: Perturbation\n time::Float64\n branch_type::Type{<:PowerSystems.ACBranch}\n branch_name::String\nend\n\nA BranchTrip completely disconnects a branch from the system. Currently there is only support for static branches disconnection, PowerSystems.Line and PowerSystems.Transformer2W. Future releases will provide support for a Dynamic Line disconnection. Note: Islanding is currently not supported in PowerSimulationsDynamics.jl. If a BranchTrip isolates a generation unit, the system may diverge due to the isolated generator.\n\nArguments:\n\ntime::Float64 : Defines when the Branch Trip will happen. This time should be inside the time span considered in the Simulation\nbranch_tipe::Type{<:PowerSystems.ACBranch} : Type of branch disconnected\nbranch_name::String : User defined name for identifying the branch\n\n\n\n\n\n","category":"type"},{"location":"api/public/#PowerSimulationsDynamics.ControlReferenceChange","page":"Public API Reference","title":"PowerSimulationsDynamics.ControlReferenceChange","text":"mutable struct ControlReferenceChange <: Perturbation\n time::Float64\n device::PowerSystems.DynamicInjection\n signal::Symbol\n ref_value::Float64\nend\n\nA ControlReferenceChange allows to change the reference setpoint provided by a generator/inverter.\n\nArguments:\n\ntime::Float64 : Defines when the Control Reference Change will happen. This time should be inside the time span considered in the Simulation\ndevice::Type{<:PowerSystems.DynamicInjection} : Dynamic device modified\nsignal::Symbol : determines which reference setpoint will be modified. The accepted signals are:\n:P_ref: Modifies the active power reference setpoint.\n:V_ref: Modifies the voltage magnitude reference setpoint (if used).\n:Q_ref: Modifies the reactive power reference setpoint (if used).\n:ω_ref: Modifies the frequency setpoint.\nref_value::Float64 : User defined value for setpoint reference.\n\n\n\n\n\n","category":"type"},{"location":"api/public/#PowerSimulationsDynamics.GeneratorTrip","page":"Public API Reference","title":"PowerSimulationsDynamics.GeneratorTrip","text":"mutable struct GeneratorTrip <: Perturbation\n time::Float64\n device::PowerSystems.DynamicInjection\nend\n\nA GeneratorTrip allows to disconnect a Dynamic Generation unit from the system at a specified time.\n\nArguments:\n\ntime::Float64 : Defines when the Generator Trip will happen. This time should be inside the time span considered in the Simulation\ndevice::Type{<:PowerSystems.DynamicInjection} : Device to be disconnected\n\n\n\n\n\n","category":"type"},{"location":"api/public/#PowerSimulationsDynamics.LoadChange","page":"Public API Reference","title":"PowerSimulationsDynamics.LoadChange","text":"mutable struct LoadChange <: Perturbation\n time::Float64\n device::PowerSystems.ElectricLoad\n signal::Symbol\n ref_value::Float64\nend\n\nA LoadChange allows to change the active or reactive power setpoint from a load.\n\nArguments:\n\ntime::Float64 : Defines when the Load Change will happen. This time should be inside the time span considered in the Simulation\ndevice::Type{<:PowerSystems.ElectricLoad} : Dynamic device modified\nsignal::Symbol : determines which reference setpoint will be modified. The accepted signals are:\n:P_ref: Modifies the active power reference setpoint.\n:Q_ref: Modifies the reactive power reference setpoint.\nref_value::Float64 : User defined value for setpoint reference.\n\n\n\n\n\n","category":"type"},{"location":"api/public/#PowerSimulationsDynamics.LoadTrip","page":"Public API Reference","title":"PowerSimulationsDynamics.LoadTrip","text":"mutable struct LoadTrip <: Perturbation\n time::Float64\n device::PowerSystems.ElectricLoad\nend\n\nA LoadTrip allows the user to disconnect a load from the system.\n\nArguments:\n\ntime::Float64 : Defines when the Generator Trip will happen. This time should be inside the time span considered in the Simulation\ndevice::Type{<:PowerSystems.ElectricLoad} : Device to be disconnected\n\n\n\n\n\n","category":"type"},{"location":"api/public/#PowerSimulationsDynamics.MassMatrixModel-Union{Tuple{Ctype}, Tuple{Any, Vector{Float64}, Type{Ctype}}} where Ctype<:PowerSimulationsDynamics.SimCache","page":"Public API Reference","title":"PowerSimulationsDynamics.MassMatrixModel","text":"Instantiate a MassMatrixModel for ODE inputs.\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.MassMatrixModel-Union{Tuple{Ctype}, Tuple{T}, Tuple{PowerSimulationsDynamics.SimulationInputs, Vector{T}, Type{Ctype}}} where {T<:Float64, Ctype<:PowerSimulationsDynamics.JacobianCache}","page":"Public API Reference","title":"PowerSimulationsDynamics.MassMatrixModel","text":"Instantiate a MassMatrixModel for ForwardDiff calculations\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.NetworkSwitch","page":"Public API Reference","title":"PowerSimulationsDynamics.NetworkSwitch","text":"function NetworkSwitch(\n time::Float64,\n ybus::SparseArrays.SparseMatrixCSC{Complex{Float64}, Int},\n)\n\nAllows to modify directly the admittance matrix, Ybus, used in the Simulation. This allows the user to perform branch modifications, three phase faults (with impedance larger than zero) or branch trips, as long as the new Ybus provided captures that perturbation.\n\nArguments:\n\ntime::Float64 : Defines when the Network Switch will happen. This time should be inside the time span considered in the Simulation\nybus::SparseArrays.SparseMatrixCSC{Complex{Float64}, Int} : Complex admittance matrix\n\n\n\n\n\n","category":"type"},{"location":"api/public/#PowerSimulationsDynamics.PerturbState","page":"Public API Reference","title":"PowerSimulationsDynamics.PerturbState","text":"function PerturbState(\n time::Float64,\n index::Int,\n value::Float64,\n)\n\nAllows the user to modify the state index by adding value. The user should modify dynamic states only, since algebraic state may require to do a reinitialization.\n\nArguments:\n\ntime::Float64 : Defines when the modification of the state will happen. This time should be inside the time span considered in the Simulation.\nindex::Int : Defines which state index you want to modify\nvalue::Float64 : Defines how much the state will increase in value\n\n\n\n\n\n","category":"type"},{"location":"api/public/#PowerSimulationsDynamics.ResidualModel-Union{Tuple{Ctype}, Tuple{Any, Vector{Float64}, Type{Ctype}}} where Ctype<:PowerSimulationsDynamics.SimCache","page":"Public API Reference","title":"PowerSimulationsDynamics.ResidualModel","text":"Instantiate an ResidualModel for ODE inputs.\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.ResidualModel-Union{Tuple{Ctype}, Tuple{T}, Tuple{PowerSimulationsDynamics.SimulationInputs, Vector{T}, Type{Ctype}}} where {T<:Float64, Ctype<:PowerSimulationsDynamics.JacobianCache}","page":"Public API Reference","title":"PowerSimulationsDynamics.ResidualModel","text":"Instantiate an ResidualModel for ForwardDiff calculations\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.Simulation-Union{Tuple{T}, Tuple{Type{T}, System, String, Tuple{Float64, Float64}}, Tuple{Type{T}, System, String, Tuple{Float64, Float64}, Vector{<:PowerSimulationsDynamics.Perturbation}}} where T<:PowerSimulationsDynamics.SimulationModel","page":"Public API Reference","title":"PowerSimulationsDynamics.Simulation","text":"function Simulation\n ::SimulationModel\n system::PowerSystems.System\n simulation_folder::String\n tspan::NTuple{2, Float64},\n perturbations::Vector{<:Perturbation} = Vector{Perturbation}();\n kwargs...,\nend\n\nBuilds the simulation object and conducts the indexing process. The original system is not modified and a copy its created and stored in the Simulation.\n\nArguments:\n\n::SimulationModel : Type of Simulation Model. ResidualModel or MassMatrixModel. See Models Section for more details\nsystem::PowerSystems.System : System data\nsimulation_folder::String : Folder directory\ntspan::NTuple{2, Float64} : Time span for simulation\nperturbations::Vector{<:Perturbation} : Vector of Perturbations for the Simulation. Default: No Perturbations\ninitialize_simulation::Bool : Runs the initialization routine. If false, simulation runs based on the operation point stored in System\ninitial_conditions::Vector{Float64} : Allows the user to pass a vector with the initial condition values desired in the simulation. If initialize_simulation = true, these values are used as a first guess and overwritten.\nfrequency_reference : Default ReferenceBus. Determines which frequency model is used for the network. Currently there are two options available:\nConstantFrequency assumes that the network frequency is 1.0 per unit at all times.\nReferenceBus will use the frequency state of a Dynamic Generator (rotor speed) or Dynamic Inverter (virtual speed) connected to the Reference Bus (defined in the Power Flow data) as the network frequency. If multiple devices are connected to such bus, the device with larger base power will be used as a reference. If a Voltage Source is connected to the Reference Bus, then a ConstantFrequency model will be used.\nsystem_to_file::Bool : Default false. Serializes the initialized system\nconsole_level::Logging : Default Logging.Warn. Sets the level of logging output to the console. Can be set to Logging.Error, Logging.Warn, Logging.Info or Logging.Debug\nfile_level::Logging : Default Logging.Info. Sets the level of logging output to file. Can be set to Logging.Error, Logging.Warn, Logging.Info or Logging.Debug\ndisable_timer_outputs::Bool : Default false. Allows the user to display timer information about the construction and initilization of the Simulation.\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.SourceBusVoltageChange","page":"Public API Reference","title":"PowerSimulationsDynamics.SourceBusVoltageChange","text":"mutable struct SourceBusVoltageChange <: Perturbation\n time::Float64\n device::PSY.Source\n signal::Symbol\n ref_value::Float64\nend\n\nA SourceBusVoltageChange allows to change the reference setpoint provided by a voltage source.\n\nArguments:\n\ntime::Float64 : Defines when the Control Reference Change will happen. This time should be inside the time span considered in the Simulation\ndevice::Type{<:PowerSystems.Source} : Device modified\nsignal::Symbol : determines which reference setpoint will be modified. The accepted signals are:\n:V_ref Modifies the internal voltage magnitude reference setpoint.\n:θ_ref Modifies the internal voltage angle reference setpoint.\nref_value::Float64 : User defined value for setpoint reference.\n\n\n\n\n\n","category":"type"},{"location":"api/public/#PowerSimulationsDynamics.Simulation!-Union{Tuple{T}, Tuple{Type{T}, System, String, Tuple{Float64, Float64}}, Tuple{Type{T}, System, String, Tuple{Float64, Float64}, Vector{<:PowerSimulationsDynamics.Perturbation}}} where T<:PowerSimulationsDynamics.SimulationModel","page":"Public API Reference","title":"PowerSimulationsDynamics.Simulation!","text":"function Simulation!\n ::SimulationModel\n system::PowerSystems.System\n simulation_folder::String\n tspan::NTuple{2, Float64},\n perturbations::Vector{<:Perturbation} = Vector{Perturbation}();\n kwargs...,\nend\n\nBuilds the simulation object and conducts the indexing process. The initial conditions are stored in the system.\n\nArguments:\n\n::SimulationModel : Type of Simulation Model. ResidualModel or MassMatrixModel. See Models Section for more details\nsystem::PowerSystems.System : System data\nsimulation_folder::String : Folder directory\ntspan::NTuple{2, Float64} : Time span for simulation\nperturbations::Vector{<:Perturbation} : Vector of Perturbations for the Simulation. Default: No Perturbations\ninitialize_simulation::Bool : Runs the initialization routine. If false, simulation runs based on the operation point stored in System\ninitial_conditions::Vector{Float64} : Allows the user to pass a vector with the initial condition values desired in the simulation. If initialize_simulation = true, these values are used as a first guess and overwritten.\nfrequency_reference : Default ReferenceBus. Determines which frequency model is used for the network. Currently there are two options available:\nConstantFrequency assumes that the network frequency is 1.0 per unit at all times.\nReferenceBus will use the frequency state of a Dynamic Generator (rotor speed) or Dynamic Inverter (virtual speed) connected to the Reference Bus (defined in the Power Flow data) as the network frequency. If multiple devices are connected to such bus, the device with larger base power will be used as a reference. If a Voltage Source is connected to the Reference Bus, then a ConstantFrequency model will be used.\nsystem_to_file::Bool : Default false. Serializes the initialized system\nconsole_level::Logging : Default Logging.Warn. Sets the level of logging output to the console. Can be set to Logging.Error, Logging.Warn, Logging.Info or Logging.Debug\nfile_level::Logging : Default Logging.Info. Sets the level of logging output to file. Can be set to Logging.Error, Logging.Warn, Logging.Info or Logging.Debug\ndisable_timer_outputs::Bool : Default false. Allows the user to display timer information about the construction and initilization of the Simulation.\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.execute!-Tuple{Simulation, Any}","page":"Public API Reference","title":"PowerSimulationsDynamics.execute!","text":"execute!(\n sim::Simulation,\n solver;\n kwargs...\n)\n\nSolves the time-domain dynamic simulation model.\n\nArguments\n\nsim::Simulation : Initialized simulation object\nsolver : Solver used for numerical integration. Must be passed correctly depending on the Type of Simulation Model\nenable_progress_bar::Bool : Default: true. Enables progress bar for the integration routine.\nAdditional solver keyword arguments can be included. See Common Solver Options in the DifferentialEquations.jl documentation for more details.\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_activepower_branch_flow-Tuple{SimulationResults, String, Symbol}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_activepower_branch_flow","text":"get_activepower_branch_flow(\n res::SimulationResults,\n name::String,\n location::Symbol,\n)\n\nFunction to obtain the active power flowing through the series element of a Branch. The user must specified is the power should be computed in the :from or to :bus, by specifying a symbol.\n\nIf :from is specified, the power is computed flowing outwards the :from bus. If :to is specified, the power is computed flowing into the :to bus.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified line\nlocation::Symbol : :from or :to to specify a bus\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_activepower_series-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_activepower_series","text":"get_activepower_series(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the active power output time series of a Dynamic Injection series out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified device\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_field_current_series-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_field_current_series","text":"get_field_current_series(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the field current time series of a Dynamic Generator out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified device\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_field_voltage_series-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_field_voltage_series","text":"get_field_voltage_series(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the field voltage time series of a Dynamic Generator out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified device\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_frequency_series-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_frequency_series","text":"get_frequency_series(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the frequency time series of a Dynamic Injection out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified device\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_imaginary_current_branch_flow-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_imaginary_current_branch_flow","text":"get_imaginary_current_branch_flow(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the imaginary current flowing through the series element of a Branch\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified line\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_imaginary_current_series-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_imaginary_current_series","text":"get_imaginary_current_series(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the imaginary current time series of a Dynamic Injection series out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified device\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_jacobian-Union{Tuple{T}, Tuple{Type{T}, System}, Tuple{Type{T}, System, Int64}} where T<:PowerSimulationsDynamics.SimulationModel","page":"Public API Reference","title":"PowerSimulationsDynamics.get_jacobian","text":"function get_jacobian(\n::Type{T},\nsystem::PSY.System,\nsparse_retrieve_loop::Int = 3,\n) where {T <: SimulationModel}\n\nReturns the jacobian function of the system model resulting from the system data.\n\nArguments:\n\n::SimulationModel : Type of Simulation Model. ResidualModel or MassMatrixModel. See Models Section for more details\nsystem::PowerSystems.System : System data\nsparse_retrieve_loop::Int : Number of loops for sparsity detection. If 0, builds the Jacobian with a DenseMatrix\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_mechanical_torque_series-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_mechanical_torque_series","text":"get_mechanical_torque_series(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the mechanical torque time series of the mechanical torque out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified device\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_pss_output_series-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_pss_output_series","text":"get_pss_output_series(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the pss output time series of a Dynamic Generator out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified device\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_reactivepower_branch_flow-Tuple{SimulationResults, String, Symbol}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_reactivepower_branch_flow","text":"get_reactivepower_branch_flow(\n res::SimulationResults,\n name::String,\n location::Symbol,\n)\n\nFunction to obtain the reactive power flowing through the series element of a Branch. The user must specified is the power should be computed in the :from or to :bus, by specifying a symbol.\n\nIf :from is specified, the power is computed flowing outwards the :from bus. If :to is specified, the power is computed flowing into the :to bus.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified line\nlocation::Symbol : :from or :to to specify a bus\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_reactivepower_series-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_reactivepower_series","text":"get_reactivepower_series(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the reactive power output time series of a Dynamic Injection series out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified device\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_real_current_branch_flow-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_real_current_branch_flow","text":"get_real_current_branch_flow(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the real current flowing through the series element of a Branch\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified line\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_real_current_series-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_real_current_series","text":"get_real_current_series(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the real current time series of a Dynamic Injection series out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified device\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_setpoints-Tuple{Simulation}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_setpoints","text":"get_setpoints(sim::Simulation)\n\nFunction that returns the reference setpoints for all the dynamic devices.\n\nArguments\n\nsim::Simulation : Simulation object that contains the initial condition and setpoints.\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_source_imaginary_current_series","page":"Public API Reference","title":"PowerSimulationsDynamics.get_source_imaginary_current_series","text":"Function to obtain output imaginary current for a source. It receives the simulation results, the Source name and an optional argument of the time step of the results.\n\n\n\n\n\n","category":"function"},{"location":"api/public/#PowerSimulationsDynamics.get_source_real_current_series","page":"Public API Reference","title":"PowerSimulationsDynamics.get_source_real_current_series","text":"Function to obtain output real current for a source. It receives the simulation results, the Source name and an optional argument of the time step of the results.\n\n\n\n\n\n","category":"function"},{"location":"api/public/#PowerSimulationsDynamics.get_state_series-Tuple{SimulationResults, Tuple{String, Symbol}}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_state_series","text":"get_state_series(\n res::SimulationResults,\n ref::Tuple{String, Symbol};\n dt::Union{Nothing, Float64, Vector{Float64}} = nothing\n)\nend\n\nFunction to obtain series of states out of DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nref:Tuple{String, Symbol} : Tuple used to identify the dynamic device, via its name, as a String, and the associated state as a Symbol.\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_voltage_angle_series-Tuple{SimulationResults, Int64}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_voltage_angle_series","text":"get_voltage_angle_series(\n res::SimulationResults,\n bus_number::Int\n)\n\nFunction to obtain the voltage angle series out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nbus_number::Int : Bus number identifier\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_voltage_magnitude_series-Tuple{SimulationResults, Int64}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_voltage_magnitude_series","text":"get_voltage_magnitude_series(\n res::SimulationResults,\n bus_number::Int\n)\n\nFunction to obtain the voltage magnitude series out of the DAE Solution.\n\nArguments:\n\nres::SimulationResults : Simulation Results object that contains the solution\nbus_number::Int : Bus number identifier\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.read_initial_conditions-Tuple{Simulation}","page":"Public API Reference","title":"PowerSimulationsDynamics.read_initial_conditions","text":"Returns a Dictionary with the resulting initial conditions of the simulation\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.show_states_initial_value-Tuple{SimulationResults}","page":"Public API Reference","title":"PowerSimulationsDynamics.show_states_initial_value","text":"show_states_initial_value(res::SimulationResults)\n\nFunction to print initial states.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.show_states_initial_value-Tuple{Simulation}","page":"Public API Reference","title":"PowerSimulationsDynamics.show_states_initial_value","text":"show_states_initial_value(sim::Simulation)\n\nFunction to print initial states.\n\nArguments\n\nsim::Simulation : Simulation object that contains the initial condition\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.small_signal_analysis-Union{Tuple{Simulation{T}}, Tuple{T}} where T<:PowerSimulationsDynamics.SimulationModel","page":"Public API Reference","title":"PowerSimulationsDynamics.small_signal_analysis","text":"small_signal_analysis(\n sim::Simulation,\n)\n\nReturns the Small Signal Output object that contains the eigenvalues and participation factors.\n\nArguments\n\nsim::Simulation : Small Signal Output object that contains the eigenvalues and participation factors\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.summary_eigenvalues-Tuple{PowerSimulationsDynamics.SmallSignalOutput}","page":"Public API Reference","title":"PowerSimulationsDynamics.summary_eigenvalues","text":"summary_eigenvalues(\n sm::SmallSignalOutput,\n)\n\nFunction to obtain a summary of the eigenvalues of the Jacobian at the operating point. It returns a DataFrame with the most associated state for each eigenvalue, its real and imaginary part, damping and frequency.\n\nArguments\n\nsm::SmallSignalOutput : Small Signal Output object that contains the eigenvalues and participation factors\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.summary_participation_factors-Tuple{PowerSimulationsDynamics.SmallSignalOutput}","page":"Public API Reference","title":"PowerSimulationsDynamics.summary_participation_factors","text":"summary_participation_factors(\n sm::SmallSignalOutput,\n)\n\nFunction to obtain the participation factor of each state to each eigenvalue. It returns a DataFrame with the participation factors of each state to all eigenvalues.\n\nArguments\n\nsm::SmallSignalOutput : Small Signal Output object that contains the eigenvalues and participation factors\n\n\n\n\n\n","category":"method"},{"location":"component_models/network/#Network-model","page":"Network","title":"Network model","text":"","category":"section"},{"location":"component_models/network/","page":"Network","title":"Network","text":"Here we discuss the models used to describe the network in PowerSimulationsDynamics.jl. This is based on a standard current injection model as defined in Power System Modelling and Scripting. The numerical advantages of current injection models outweigh the complexities of implementing constant power loads for longer-term transient stability analysis. The network is defined in a synchronous reference frame (SRF), named the RI (real-imaginary) reference frame, rotating at the constant base frequency Omega_b.","category":"page"},{"location":"component_models/network/","page":"Network","title":"Network","text":"In simple terms, PowerSimulationsDynamics.jl internally tracks the current-injection balances at the nodal level from all the devices on the system. Based on the buses and branches information, the system constructor computes the admittance matrix boldsymbolY assuming nominal frequency and this is used for static branch modeling. The algebraic equations for the static portions of the network are as follows:","category":"page"},{"location":"component_models/network/","page":"Network","title":"Network","text":" beginalign\n 0 = boldsymboli(boldsymbolx boldsymbolv) - boldsymbolYboldsymbolv\n endalign","category":"page"},{"location":"component_models/network/","page":"Network","title":"Network","text":"where boldsymboli = i_r + ji_i is the vector of the sum of complex current injections from devices , boldsymbolx is the vector of states and boldsymbolv = v_r + jv_i is the vector of complex bus voltages. Equations (1) connect all the port variables, i.e., currents, defined for each injection device. Components that contribute to (1) by modifying the current boldsymboli are (i) static injection devices, (ii) dynamic injection devices, and (iii) dynamic network branches. Components that contribute to modify the admittance matrix boldsymbolY are static branches.","category":"page"},{"location":"component_models/network/#Static-Branches-(or-Algebraic-Branches)","page":"Network","title":"Static Branches (or Algebraic Branches)","text":"","category":"section"},{"location":"component_models/network/#Lines","page":"Network","title":"Lines","text":"","category":"section"},{"location":"component_models/network/","page":"Network","title":"Network","text":"Each line is defined using a pi model connecting two buses (nm), with a series resistance r and reactance x, and a shunt capacitance at both ends (c_n c_m). The values are already in system per unit. Then each branch contributes to the admittance matrix as follows:","category":"page"},{"location":"component_models/network/","page":"Network","title":"Network","text":"beginalign\nY_nn += frac1r+jx + jc_n \nY_nm += frac-1r+jx \nY_mm += frac1r+jx + jc_m \nY_mn += frac-1r+jx \nendalign","category":"page"},{"location":"component_models/network/#Two-Windings-Transformers","page":"Network","title":"Two-Windings Transformers","text":"","category":"section"},{"location":"component_models/network/","page":"Network","title":"Network","text":"Similarly to lines these are defined by a series reactance and impedance. The equations are equivalently of the lines without the shunt capacitance.","category":"page"},{"location":"component_models/network/#Dynamic-Branches","page":"Network","title":"Dynamic Branches","text":"","category":"section"},{"location":"component_models/network/","page":"Network","title":"Network","text":"Dynamic network branches contribute directly to (1) by modifying the vector of complex currents. Their parameters are also the series resistance r and reactance x, and a shunt capacitance at both ends (c_n c_m) for a line ell. In addition, they define 3 new additional differential equations per line (6 in total for real and imaginary part):","category":"page"},{"location":"component_models/network/","page":"Network","title":"Network","text":"beginalign\n fraclOmega_b fracdboldsymboli_elldt = (boldsymbolv_n - boldsymbolv_m) - (r+jl) boldsymboli_ell \n fracc_nOmega_b fracdboldsymbolv_ndt = boldsymboli_n^textcap - jc_nboldsymbolv_n \n fracc_mOmega_b fracdboldsymbolv_mdt = boldsymboli_m^textcap - jc_mboldsymbolv_m\nendalign","category":"page"},{"location":"component_models/network/","page":"Network","title":"Network","text":"Since all the values are in per unit, the reactance is equal to the inductance.","category":"page"},{"location":"component_models/network/","page":"Network","title":"Network","text":"A detail discussion about the effects of different line models in the modeling of inverters is presented in Grid Forming Inverter Small Signal Stability: Examining Role of Line and Voltage Dynamics","category":"page"},{"location":"component_models/pss/#Power-System-Stabilizers-(PSS)","page":"PSS","title":"Power System Stabilizers (PSS)","text":"","category":"section"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"PSS are used to add an additional signal v_s to the input signal of the AVR: v_textref = v_textref^textavr + v_s.","category":"page"},{"location":"component_models/pss/#Fixed-PSS-[PSSFixed]","page":"PSS","title":"Fixed PSS [PSSFixed]","text":"","category":"section"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"This is a simple model that set the stabilization signal to be equal to a desired constant value v_s = v_s^textfix. The absence of PSS can be modelled using this component with v_s^textfix = 0.","category":"page"},{"location":"component_models/pss/#Simple-PSS-[PSSSimple]","page":"PSS","title":"Simple PSS [PSSSimple]","text":"","category":"section"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"This is the most basic PSS that can be implemented, on which the stabilization signal is a proportional controller over the frequency and electrical power:","category":"page"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"beginalign\nv_s = K_omega(omega - omega_s) + K_p(omega tau_e - P_textref) tag1a\nendalign","category":"page"},{"location":"component_models/pss/#IEEE-Stabilizer-[IEEEST]","page":"PSS","title":"IEEE Stabilizer [IEEEST]","text":"","category":"section"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"The 7th-order PSS model is:","category":"page"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"beginalign\nA_4 dotx_1 = u - A_3 x_1 - x_2 tag2a \ndotx_2 = x_1 tag2b \nA_2dotx_3 = x_2 - A_1 x_3 - x_4 tag2c\ndotx_4 = x_3 tag2d\nT_2dotx_5 = left(1 - fracT_1T_2right) y_f - x_5 tag2e\nT_4dotx_6 = left(1 - fracT_3T_4right) y_LL1 - x_6 tag2f\nT_6dotx_7 = -left(fracK_s T_5T_6 y_LL2 + x_7 right) tag2g\nendalign","category":"page"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"with","category":"page"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"beginalign*\ny_f = fracT_4T_2 x_2 + left(T_3 - T_1 fracT_4T_2right) x_3 + left(1 - fracT_4T_2right)x_4 \ny_LL1 = x_5 + fracT_1T_2 y_f \ny_LL2 = x_6 + fracT_3T_4 y_LL1 \ny_out = x_7 + fracK_s T_5T_6 y_LL2 \nV_s = textclamp(y_out textLs_textmin textLs_textmax)\nendalign*","category":"page"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"on which u is the input signal to the PSS, that depends on the flag. Currently, rotor speed, electric torque, mechanical torque and voltage magnitude are supported inputs.","category":"page"},{"location":"component_models/pss/#STAB1-PSS-[STAB1]","page":"PSS","title":"STAB1 PSS [STAB1]","text":"","category":"section"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"The 3rd-order PSS model is:","category":"page"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"beginalign\nT dotx_1 = K omega - x_1 tag3a \nT_3dotx_2 = left(1 - fracT_1T_3right) x_1 - x_2 tag3b \nT_4dotx_3 = left(1 - fracT_2T_4right) y_LL - x_2 tag3c \nendalign","category":"page"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"with","category":"page"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"beginalign*\ny_LL = x_2 + fracT_1T_3 x_1 \ny_out = x_3 + fracT_2T_4 y_LL \nV_s = textclamp(y_out -H_lim H_lim)\nendalign*","category":"page"},{"location":"initialization/#Initialization-Routine","page":"Initialization","title":"Initialization Routine","text":"","category":"section"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"Dynamic Simulations require a reasonable initial condition for the system model. In most analysis, power systems models are initialized at a stable equilibrium, which implies that:","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"beginalign\n0 = F(x u eta)\nendalign","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"Finding the solution of a large non-linear system is challenging and requires a reasonable initial guess. In classical power systems literature, the routine to find equilibrium points for the dynamic injection devices' components is well known and used in free and commercial software (see Power System Modelling and Scripting page 224). However, in the case of converter interface dynamic injection models, such routines are not documented.","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"Initializing the system also requires finding valid set-points for the devices in the system. For instance, finding the reference voltage in an AVR to match the voltage magnitude resulting from the power flow solution. PowerSimulationsDynamics.jl prioritizes mathching the dynamic components control references to match the power flow results.","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"Finally, the initialization must instantiate not only the values of the states but also the inner vars. PowerSimulationsDynamics.jl handles all this initializations by default.","category":"page"},{"location":"initialization/#Initialization-interface","page":"Initialization","title":"Initialization interface","text":"","category":"section"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"By default PowerSimulationsDynamics.jl initializes the system following the steps described below. it is possible to provide an initial guess for the initial conditions to speed up the initialization process.","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"Simulation(\n ResidualModel,\n sys,\n pwd(),\n (0.0, 20.0);\n initial_conditions = x0_init,\n )","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"It is also possible to initialize the simulation using a flat start (V_mag = 1.0, V_angle = 0.0 and x0 = zeros) using initialize_simulation = false. However, for medium or large system this is unlikely to result in a valid initial condition for the simulation.","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"Simulation(\n ResidualModel,\n sys,\n pwd(),\n (0.0, 20.0);\n initialize_simulation = false,\n )","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"If you want to avoid PowerSimulationsDynamics.jl from finding an stable equilibrium automatically and provide the initial condition manually you can use the following flag combination.","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"Simulation(\n ResidualModel,\n sys,\n pwd(),\n (0.0, 20.0);\n initialize_simulation = false,\n initial_conditions = x0_init,\n )","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"
","category":"page"},{"location":"models/","page":"Models","title":"Models","text":"Contrary to the generator, there are many control structures that can be used to model inverter controllers (e.g. grid-following, grid feeding or virtual synchronous machine). For this purpose, more variables are shared among the components in order to cover all these posibilities.","category":"page"},{"location":"models/#Reference","page":"Models","title":"Reference","text":"","category":"section"},{"location":"models/","page":"Models","title":"Models","text":"For models, check the library in PowerSystems.jl","category":"page"},{"location":"component_models/avr/#Automatic-Voltage-Regulators-(AVR)","page":"AVR","title":"Automatic Voltage Regulators (AVR)","text":"","category":"section"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"AVR are used to determine the voltage in the field winding v_f (or V_f) in the model.","category":"page"},{"location":"component_models/avr/#Fixed-AVR-[AVRFixed]","page":"AVR","title":"Fixed AVR [AVRFixed]","text":"","category":"section"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"This is a simple model that set the field voltage to be equal to a desired constant value v_f = v_textfix.","category":"page"},{"location":"component_models/avr/#Simple-AVR-[AVRSimple]","page":"AVR","title":"Simple AVR [AVRSimple]","text":"","category":"section"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"This depicts the most basic AVR, on which the field voltage is an integrator over the difference of the measured voltage and a reference:","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign\ndotv_f = K_v(v_textref - v_h) tag1a\nendalign","category":"page"},{"location":"component_models/avr/#AVR-Type-I-[AVRTypeI]","page":"AVR","title":"AVR Type I [AVRTypeI]","text":"","category":"section"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"This AVR is a simplified version of the IEEE DC1 AVR model:","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign\ndotv_f = -frac1T_e left V_f(K_e + S_e(v_f))-v_r1 right tag2a \ndotv_r1 = frac1T_a left K_aleft(v_textref - v_m - v_r2 - fracK_fT_fv_fright) - v_r1 right tag2b \ndotv_r2 = -frac1T_f left fracK_fT_fv_f + v_r2 right tag2c \ndotv_m = frac1T_r (v_h - v_m) tag2d\nendalign","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"with the ceiling function:","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign*\nS_e(v_f) = A_e exp(B_ev_f)\nendalign*","category":"page"},{"location":"component_models/avr/#AVR-Type-II-[AVRTypeII]","page":"AVR","title":"AVR Type II [AVRTypeII]","text":"","category":"section"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"This model represents a static exciter with higher gains and faster response than the Type I:","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign\ndotv_f = -frac1T_e left V_f(1 + S_e(v_f))-v_r right tag3a \ndotv_r1 = frac1T_1 left K_0left(1 - fracT_2T_1 right)(v_textref - v_m) - v_r1 right tag3b \ndotv_r2 = frac1K_0 T_3 left left( 1 - fracT_4T_3 right) left( v_r1 + K_0fracT_2T_1(v_textref - v_m)right) - K_0 v_r2 right tag3c \ndotv_m = frac1T_r (v_h - v_m) tag3d\nendalign","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"with","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign*\nv_r = K_0v_r2 + fracT_4T_3 left( v_r1 + K_0fracT_2T_1(v_textref - v_m)right) \nS_e(v_f) = A_e exp(B_ev_f)\nendalign*","category":"page"},{"location":"component_models/avr/#Excitation-System-AC1A-[ESAC1A]","page":"AVR","title":"Excitation System AC1A [ESAC1A]","text":"","category":"section"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"The model represents the 5-states IEEE Type AC1A Excitation System Model:","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign\ndotV_m = frac1T_r (V_h - V_m) tag4a \ndotV_r1 = frac1T_b left(V_in left(1 - fracT_cT_bright) - V_r1right) tag4b \ndotV_r2 = frac1T_a (K_a V_out - V_r2) tag4c \ndotV_e = frac1T_e (V_r - V_FE) tag4d \ndotV_r3 = frac1T_f left( - fracK_fT_fV_FE - V_r3 right) tag4e \nendalign","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"with","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign*\nI_N = fracK_cV_e X_adI_fd \nV_FE = K_d X_adI_fd + K_e V_e + S_e V_e \nS_e = Bfrac(V_e-A)^2V_e \nV_F1 = V_r3 + fracK_fT_f V_FE \nV_in = V_ref - V_m - V_F1 \nV_out = V_r1 + fracT_cT_b V_in \nV_f = V_e f(I_N) \nf(I_N) = leftbeginarraycl\n 1 text if I_N le 0 \n 1 - 0577 I_N text if 0 I_N le 0433 \n sqrt075 - I_N^2 text if 0433 I_N le 075 \n 1732(1-I_N) text if 075 I_N le 1 \n 0 text if I_N 1 endarray right\nendalign*","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"on which X_adI_fd is the field current coming from the generator and V_h is the terminal voltage, and AB are the saturation coefficients computed using the E_1 E_2 S_e(E_1) S_e(E_2) data.","category":"page"},{"location":"component_models/avr/#Simplified-Excitation-System-[SEXS]","page":"AVR","title":"Simplified Excitation System [SEXS]","text":"","category":"section"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"The model for the 2 states excitation system SEXS:","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign\ndotV_f = frac1T_e (V_LL - V_f) tag5a \ndotV_r = frac1T_b leftleft(1 - fracT_aT_bright) V_in - V_r right tag5b\nendalign","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"with","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign*\nV_in = V_ref + V_s - V_h \nV_LL = V_r + fracT_aT_bV_in \nendalign*","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"on which V_h is the terminal voltage and V_s is the PSS output signal.","category":"page"},{"location":"component_models/avr/#Excitation-System-ST1-[EXST1]","page":"AVR","title":"Excitation System ST1 [EXST1]","text":"","category":"section"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"The model represents the 4-states IEEE Type ST1 Excitation System Model:","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign\ndotV_m = frac1T_r (V_h - V_m) tag6a \ndotV_rll = frac1T_b left(V_in left(1 - fracT_cT_bright) - V_rllright) tag6b \ndotV_r = frac1T_a (V_LL - V_r) tag6c \ndotV_fb = frac1T_f left( - fracK_fT_fV_r - V_fb right) tag6d \nendalign","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"with ","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign*\nV_in = V_ref - V_m - y_hp \nV_LL = V_r + fracT_cT_b V_in \ny_hp = V_fb + fracK_fT_f V_r \nV_f = V_r \nendalign*","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"on which V_h is the terminal voltage.","category":"page"},{"location":"component_models/avr/#Excitation-System-EXAC1-[EXAC1]","page":"AVR","title":"Excitation System EXAC1 [EXAC1]","text":"","category":"section"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"The model represents the 5-states IEEE Type EXAC1 Excitation System Model:","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign\ndotV_m = frac1T_r (V_h - V_m) tag7a \ndotV_r1 = frac1T_b left(V_in left(1 - fracT_cT_bright) - V_r1right) tag7b \ndotV_r2 = frac1T_a (K_a V_out - V_r2) tag7c \ndotV_e = frac1T_e (V_r - V_FE) tag7d \ndotV_r3 = frac1T_f left( - fracK_fT_fV_FE - V_r3 right) tag7e \nendalign","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"with","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"beginalign*\nI_N = fracK_cV_e X_adI_fd \nV_FE = K_d X_adI_fd + K_e V_e + S_e V_e \nS_e = Bfrac(V_e-A)^2V_e \nV_F1 = V_r3 + fracK_fT_f V_FE \nV_in = V_ref - V_m - V_F1 \nV_out = V_r1 + fracT_cT_b V_in \nV_f = V_e f(I_N) \nf(I_N) = leftbeginarraycl\n 1 text if I_N le 0 \n 1 - 0577 I_N text if 0 I_N le 0433 \n sqrt075 - I_N^2 text if 0433 I_N le 075 \n 1732(1-I_N) text if 075 I_N le 1 \n 0 text if I_N 1 endarray right\nendalign*","category":"page"},{"location":"component_models/avr/","page":"AVR","title":"AVR","text":"on which X_adI_fd is the field current coming from the generator and V_h is the terminal voltage, and AB are the saturation coefficients computed using the E_1 E_2 S_e(E_1) S_e(E_2) data.","category":"page"},{"location":"component_models/outer_control/#Outer-Loop-Controls","page":"Outer Control","title":"Outer Loop Controls","text":"","category":"section"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"This component defines controllers for both active and reactive power. The joint design is based on the fact that many novel control techniques can be based on joint control of active and reactive power.","category":"page"},{"location":"component_models/outer_control/#Virtual-Inertia-and-Q-droop-[OuterControl]","page":"Outer Control","title":"Virtual Inertia and Q-droop [OuterControl]","text":"","category":"section"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"The following model represent a virtual synchronous machine model to represent how active power is going to be deployed. The constructor is OuterControl{VirtualInertia, ReactivePowerDroop}. It defines a new SRF denoted as theta_textolc for the active power controller and uses a simple voltage droop for dispatching reactive power:","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n dotomega_textolc = fracp_textrefT_a - fracp_eT_a - frack_d(omega_textolc - omega_textpll)T_a - frack_omega(omega_textolc - omega_textref)T_a tag1a \n dottheta_textolc = Omega_b (omega_textolc - omega_textsys) tag1b \n dotq_m = omega_f (q_e - q_m) tag1c\nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"with","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n p_e = v_ri_r + v_ii_i tag1d \n q_e = v_ii_r - v_ri_i tag1e \n v_textolc^textref = v_textref + k_q(q_textref - q_m) tag1f\nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"In this case, the measurement of power are being done in the capacitor of the LCL filter. However, depending on the model, this measurements could be different depending on where is the point of common coupling.","category":"page"},{"location":"component_models/outer_control/#Active-Power-Droop-(P-droop)-and-Q-droop-[OuterControl]","page":"Outer Control","title":"Active Power Droop (P-droop) and Q-droop [OuterControl]","text":"","category":"section"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"The following model represent a Ptext-f droop model to represent how active power is going to be deployed. The constructor is OuterControl{ActivePowerDroop, ReactivePowerDroop}. It defines a new SRF denoted as theta_textolc for the active power controller and uses a simple voltage droop for dispatching reactive power. Both active and reactive power are measured via a low-pass filter:","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n dottheta_textolc = Omega_b (omega_textolc - omega_textsys) tag2a \n dotp_m = omega_z (p_e - p_m) tag2b \n dotq_m = omega_f (q_e - q_m) tag2c\nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"with","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n p_e = v_ri_r + v_ii_i tag2d \n q_e = v_ii_r - v_ri_i tag2e \n omega_textolc = omega_textref + R_p (p_textref - p_m) tag2f \n v_textolc^textref = v_textref + k_q(q_textref - q_m) tag2g\nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"In this case, the measurement of power are being done in the capacitor of the LCL filter. However, depending on the model, this measurements could be different depending on where is the point of common coupling.","category":"page"},{"location":"component_models/outer_control/#Active-and-Reactive-Virtual-Oscillator-Controllers-[OuterControl]","page":"Outer Control","title":"Active and Reactive Virtual Oscillator Controllers [OuterControl]","text":"","category":"section"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"The following model represents a Virtual Oscillator Controller for both active and reactive power to generate the voltage references that will be used in the Voltage Controller. The contructor is OuterControl{ActiveVirtualOscillator, ReactiveVirtualOscillator} It defines a new SRF denoted as theta_textolc and a voltage reference E_textolc. The equations are:","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n dottheta_textolc = Omega_b (omega_textolc - omega_textsys) tag3a \n dotE_olc = Omega_b left(frack_1E_oc (-sin(gamma) (p_textref - p_e) + cos(gamma)(q_textref - q_e)) + k_2 (V_textref - E_oc^2)E_oc right) tag3b \nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"with","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n gamma = psi - fracpi2 tag3c \n omega_textolc = omega_textsys + frack_1E_oc^2 left(cos(gamma) (p_textref - p_e) + sin(gamma)(q_textref - q_e) right) tag3d \n p_e = v_ri_r + v_ii_i tag3e \n q_e = v_ii_r - v_ri_i tag3f \nendalign","category":"page"},{"location":"component_models/outer_control/#Active-and-Reactive-Power-PI-Controllers-(Grid-Following)-[OuterControl]","page":"Outer Control","title":"Active and Reactive Power PI Controllers (Grid Following) [OuterControl]","text":"","category":"section"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"The following model represents a PI controller for both active and reactive power to generate the current references that will be used in the Current Controller of the inner control CurrentModeControl. The constructor is OuterControl{ActivePowerPI, ReactivePowerPI}. The equations are:","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n dotsigma_p = p_textref - p_m tag4a \n dotp_m = omega_z (p_e - p_m) tag4b \n dotsigma_q = q_textref - q_m tag4c \n dotq_m = omega_f (q_e - p_m) tag4d \nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"with","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n p_e = v_ri_r + v_ii_i tag4e \n q_e = v_ii_r - v_ri_i tag4f \n omega_textolc = omega_textpll tag4g \n theta_textolc = theta_textpll tag4h \n i_textdcv^textref = k_p^q (q_textref - q_m) + k_i^q sigma_q tag4i \n i_textqcv^textref = k_p^p (p_textref - p_m) + k_i^p sigma_p tag4j \nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"This models requires a PLL to have a SRF for an internal dq reference frame. Contrary to the Grid-Forming model, it cannot work without a PLL. Since this Outer Control outputs a current reference, it can only be used with a current mode inner control (i.e. that receives a current reference instead of a voltage reference).","category":"page"},{"location":"component_models/outer_control/#Active-and-Reactive-Generic-Renewable-Controller-Type-AB-[OuterControl]","page":"Outer Control","title":"Active and Reactive Generic Renewable Controller Type AB [OuterControl]","text":"","category":"section"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"The following model represents an outer controller for both active and reactive power from generic industrial models REPCA and REECB to generate the current references that will be used in the Current Controller of the inner control RECurrentControlB. The constructor is OuterControl{ActiveRenewableControllerAB, ReactiveRenewableControllerAB}. The equations will depend on the flags used.","category":"page"},{"location":"component_models/outer_control/#Active-part","page":"Outer Control","title":"Active part","text":"","category":"section"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"In the case of F_Flag = 1 the equations (without limits and freezing) are:","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n dotp_textflt = frac1T_p (p_e - p_textflt) tag5a \n dotxi_P = p_texterr tag5b \n dotp_textext = frac1T_g (K_pg p_texterr + K_ig xi_P) tag5c \n dotp_textord = frac1T_textpord (p_textext - p_textord) tag5d\nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"with","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n p_e = v_ri_r + v_ii_i tag5e \n p_texterr = p_textref + p_textdroop - p_textflt tag5f \nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"In the case of F_Flag = 0 the equations (without limits) are simply","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n dotp_textord = frac1T_textpord (p_textref - p_textord) tag5g\nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"The current command going to the Inner Loop is computed as:","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n I_textocpcmd = fracp_textordV_texttflt tag5h\nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"on which V_texttflt is the filtered terminal bus voltage coming from the inner controller.","category":"page"},{"location":"component_models/outer_control/#Reactive-part","page":"Outer Control","title":"Reactive part","text":"","category":"section"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"In the case of VC_Flag = 0, Ref_Flag = 0, PF_Flag = 0, V_Flag = 1 the equations (without limits and freezing) are:","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n dotq_textflt = frac1T_textfltr (q_e - q_textflt) tag5i \n dotxi_textqoc = q_texterr tag5j \n dotq_LL = frac1T_fv(Q_textpi ( 1 - T_ftT_fv) - q_LL) tag5k \n dotxi_Q = V_textpiin tag5l \nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"with","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n q_e = v_ii_r - v_ri_i tag5m \n q_texterr = q_textref - q_flt tag5n \n Q_textpi = K_p q_texterr + K_i xi_textqoc tag5o \n Q_textext = q_LL + fracT_ftT_fv Q_textpi tag5p \n V_textpiin = Q_textext - q_e tag5q \nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"The output to the inner controller are V_textocqcmd if the Q_Flag = 1 on the Inner Controller, or I_textocqcmd if Q_Flag = 0:","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n V_textocqcmd = (K_qp V_textpiin + K_qi xi_Q) - V_texttflt tag5r \n I_textocqmcd = fracQ_textextmax(V_texttflt 001) tag5s\nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"In the case of VC_Flag = 0, Ref_Flag = 0, PF_Flag = 0, V_Flag = 1 the equations (without limits and freezing) are:","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"beginalign\n dotq_textflt = frac1T_textfltr (q_e - q_textflt) tag5t \n dotxi_textqoc = q_texterr tag5u \n dotq_LL = frac1T_fv(Q_textpi ( 1 - T_ftT_fv) - q_LL) tag5v \nendalign","category":"page"},{"location":"component_models/outer_control/","page":"Outer Control","title":"Outer Control","text":"The remaining models for other flags will be included when implemented in PowerSimulationsDynamics.jl.","category":"page"},{"location":"perturbations/#Perturbations","page":"Perturbations","title":"Perturbations","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Perturbations are used to alter the system from its steady state operation. If a Simulation is properly initialized, all states will remain fixed in their initial condition if no perturbation is applied to the system.","category":"page"},{"location":"perturbations/#List-of-perturbations","page":"Perturbations","title":"List of perturbations","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"NetworkSwitch: allows to modify directly the admittance matrix, Ybus, used in the Simulation.\nBranchTrip: completely disconnects a branch from the system.\nBranchImpedanceChange: change the impedance of a branch by a user defined multiplier. \nGeneratorTrip: allows to disconnect a Dynamic Generation unit from the system.\nControlReferenceChange: allows to change the reference setpoint provided by a generator/inverter.\nLoadChange: allows to change the active or reactive power setpoint from a load.\nLoadTrip: allows the user to disconnect a load from the system.\nSourceBusVoltageChange: allows to change the reference setpoint provided by a voltage source.","category":"page"},{"location":"perturbations/#Examples","page":"Perturbations","title":"Examples","text":"","category":"section"},{"location":"perturbations/#Example-1:-Circuit-Disconnection-using-NetworkSwitch","page":"Perturbations","title":"Example 1: Circuit Disconnection using NetworkSwitch","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Consider a two bus system connected via a double circuit line, on which each circuit has parameters, r = 0.0, x = 0.1, b = 0.0 per unit, then the admittance matrix of the original system is given by:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"yb = [0.0 - 20.0im 0.0 + 20.0im\n 0.0 + 20.0im 0.0 - 20.0im]","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Triping one circuit can be modeled by doubling the impedance, i.e., dividing by 2 the admittance:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"new_yb = [0.0 - 10.0im 0.0 + 10.0im\n 0.0 + 10.0im 0.0 - 10.0im]","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"To apply a Network Switch, we require to use a sparse matrix, so we can do this by simply:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"using SparseArrays\nnew_yb = sparse(new_yb)","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Then, this perturbation ocurring at t = 10 seconds can be included as:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"ns1 = NetworkSwitch(1.0, new_yb)","category":"page"},{"location":"perturbations/#Example-2:-Three-Phase-Fault-using-NetworkSwitch","page":"Perturbations","title":"Example 2: Three Phase Fault using NetworkSwitch","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Another perturbation that can be modeled is a three phase fault at Bus 1 with impedance r_f = 0.0001, x_f = 0.0 per unit, then the admittance of this new system is:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"new_yb2 = [10000.0 - 20.0im 0.0 + 20.0im\n 0.0 + 20.0im 0.0 - 20.0im]","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Then, this perturbation ocurring at t = 10 seconds can be included as:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"new_yb2 = sparse(new_yb2)\nns2 = NetworkSwitch(1.0, new_yb2)","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Now, consider that the fault is cleared at t = 105 seconds by disconnecting the Circuit 2 of the line. This can be modeled with the single circuit admittance matrix:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"new_yb3 = [0.0 - 10.0im 0.0 + 10.0im\n 0.0 + 10.0im 0.0 - 10.0im]","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"and the perturbation as:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"new_yb3 = sparse(new_yb3)\nns3 = NetworkSwitch(1.05, new_yb3)","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Then, the entire perturbation for the Simulation can be included in a vector of perturbations as:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"three_fault = [ns2, ns3]","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"that can be passed as a perturbation argument in the Simulation construction.","category":"page"},{"location":"perturbations/#Example-3:-BranchTrip","page":"Perturbations","title":"Example 3: BranchTrip","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Consider the following 2 bus system defined by:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"buses = [\n Bus(1, \"nodeA\", \"REF\", 0, 1.0, (min = 0.9, max = 1.05), 230, nothing, nothing),\n Bus(2, \"nodeB\", \"PV\", 0, 1.0, (min = 0.9, max = 1.05), 230, nothing, nothing),\n]\n\nline1 = Line(\n \"Circuit1\",\n true,\n 0.0,\n 0.0,\n Arc(from = buses[1], to = buses[2]),\n 0.00,\n 0.1,\n (from = 0.0, to = 0.0),\n 2.0,\n (min = -0.7, max = 0.7),\n )\nline2 = Line(\n \"Circuit2\",\n true,\n 0.0,\n 0.0,\n Arc(from = buses[1], to = buses[2]),\n 0.0,\n 0.1,\n (from = 0.0, to = 0.0),\n 2.0,\n (min = -0.7, max = 0.7),\n )\n\nsys = System(100.0, buses, [], [], [line1, line2])","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"A Branch Trip of Circuit 2 at time t = 10 seconds, can be implemented as:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"b_trip = BranchTrip(1.0, Line, \"Circuit2\")","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Note: Islanding is currently not supported in PowerSimulationsDynamics.jl. If a BranchTrip isolates a generation unit, the system may diverge due to the isolated generator.","category":"page"},{"location":"perturbations/#Example-4:-BranchImpedanceChange","page":"Perturbations","title":"Example 4: BranchImpedanceChange","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Following the same example as before, it is possible to amplify the impedance of a single circuit by 2.0 (that would represent that this Circuit is actually composed by 2 circuits) using the following perturbation:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"b_change = BranchImpedanceChange(1.0, Line, \"Circuit2\", 2.0)","category":"page"},{"location":"perturbations/#Example-5:-GeneratorTrip","page":"Perturbations","title":"Example 5: GeneratorTrip","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Consider that you have a generator at bus 102, named \"generator-102-1\" in your system called sys. The constructor to trip it from the system is:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"g = get_component(DynamicGenerator, sys, \"generator-102-1\")\ng_trip = GeneratorTrip(1.0, g)","category":"page"},{"location":"perturbations/#Example-6:-ControlReferenceChange","page":"Perturbations","title":"Example 6: ControlReferenceChange","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Consider that you have a generator at bus 102, named \"generator-102-1\" in your system called sys. The constructor to change is active power reference to 0.5 is:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"g = get_component(DynamicGenerator, sys, \"generator-102-1\")\ncrc = ControlReferenceChange(1.0, g, :P_ref, 0.5)","category":"page"},{"location":"perturbations/#Example-7:-LoadChange","page":"Perturbations","title":"Example 7: LoadChange","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Consider that you have a load at bus 103, named \"load-103-1\" in your system called sys. The constructor to change is active power reference to 0.8 per unit at t = 10 seconds is:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"l_device = get_component(ElectricLoad, sys, \"load-103-1\")\nl_change = LoadChange(1.0, l_device, :P_ref, 0.8)","category":"page"},{"location":"perturbations/#Example-8:-LoadTrip","page":"Perturbations","title":"Example 8: LoadTrip","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Consider that you have a load at bus 103, named \"load-103-1\" in your system called sys. The constructor to disconnect such load at t = 10 seconds is:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"l_device = get_component(ElectricLoad, sys, \"load-103-1\")\nl_trip = LoadTrip(1.0, l_device)","category":"page"},{"location":"perturbations/#Example-9:-SourceBusVoltageChange","page":"Perturbations","title":"Example 9: SourceBusVoltageChange","text":"","category":"section"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"Consider that you have a voltage source at bus 101, named \"source-101-1\" in your system called sys. The constructor to change is voltage magnitude reference to 1.02 per unit at t = 10 seconds is:","category":"page"},{"location":"perturbations/","page":"Perturbations","title":"Perturbations","text":"s_device = get_component(Source, sys, \"source-101-1\")\ns_change = SourceBusVoltageChange(1.0, s_device, 1, 1.02)","category":"page"},{"location":"component_models/machines/#Machines","page":"Machine","title":"Machines","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"The machine component describes the stator-rotor electromagnetic dynamics.","category":"page"},{"location":"component_models/machines/#Classical-Model-(Zero-Order)-[BaseMachine]","page":"Machine","title":"Classical Model (Zero Order) [BaseMachine]","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"This is the classical order model that does not have differential equations in its machine model (delta and omega are defined in the shaft):","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\n left beginarrayc i_d i_q endarray right = left beginarraycc r_a -x_d x_d r_a endarray right^-1 left beginarrayc -v_d e_q - v_q endarray right tag1a\np_e approx tau_e = (v_q + r_a i_q)i_q + (v_d + r_ai_d)i_d tag1b\nendalign","category":"page"},{"location":"component_models/machines/#One-d-One-q-Model-(2nd-Order)-[OneDOneQMachine]","page":"Machine","title":"One d- One q- Model (2nd Order) [OneDOneQMachine]","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"This model includes two transient emf with their respective differential equations:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ndote_q = frac1T_d0 left-e_q + (x_d-x_d)i_d + v_fright tag2a\ndote_d = frac1T_q0 left-e_d + (x_q-x_q)i_q right tag2b\n left beginarrayc i_d i_q endarray right = left beginarraycc r_a -x_q x_d r_a endarray right^-1 left beginarrayc e_d-v_d e_q - v_q endarray right tag2c\np_e approx tau_e = (v_q + r_a i_q)i_q + (v_d + r_ai_d)i_d tag2d\nendalign","category":"page"},{"location":"component_models/machines/#Marconato-Machine-(6th-Order)-[MarconatoMachine]","page":"Machine","title":"Marconato Machine (6th Order) [MarconatoMachine]","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"The Marconato model defines 6 differential equations, two for stator fluxes and 4 for transient and subtransient emfs:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ndotpsi_d = Omega_b(r_ai_d + omega psi_q + v_d) tag3a \ndotpsi_q = Omega_b(r_ai_q - omega psi_d + v_q) tag3b \ndote_q = frac1T_d0 left-e_q - (x_d-x_d-gamma_d)i_d + left(1- fracT_AAT_d0 right) v_fright tag3c\ndote_d = frac1T_q0 left-e_d + (x_q-x_q-gamma_q)i_q right tag3d\ndote_q = frac1T_d0 left-e_q + e_q - (x_d-x_d+gamma_d)i_d + fracT_AAT_d0v_f right tag3e \ndote_d = frac1T_q0 left-e_d + e_d + (x_q-x_q+gamma_q)i_q right tag3f \ni_d = frac1x_d (e_q - psi_d) tag3g \ni_q = frac1x_q (-e_d - psi_q) tag3h \ntau_e = psi_d i_q - psi_q i_d tag3i\nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"with","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign*\n gamma_d = fracT_d0 x_dT_d0 x_d (x_d - x_d) \n gamma_q = fracT_q0 x_qT_q0 x_q (x_q - x_q)\nendalign*","category":"page"},{"location":"component_models/machines/#Simplified-Marconato-Machine-(4th-Order)-[SimpleMarconatoMachine]","page":"Machine","title":"Simplified Marconato Machine (4th Order) [SimpleMarconatoMachine]","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"This model neglects the derivative of stator fluxes (dotpsi_d and dotpsi_q) and assume that the rotor speed stays close to 1 pu (omegapsi_d=psi_d and omegapsi_q=psi_q) that allows to remove the stator fluxes variables from the Marconato model.","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ndote_q = frac1T_d0 left-e_q - (x_d-x_d-gamma_d)i_d + left(1- fracT_AAT_d0 right) v_fright tag4a\ndote_d = frac1T_q0 left-e_d + (x_q-x_q-gamma_q)i_q right tag4b\ndote_q = frac1T_d0 left-e_q + e_q - (x_d-x_d+gamma_d)i_d + fracT_AAT_d0v_f right tag4c \ndote_d = frac1T_q0 left-e_d + e_d + (x_q-x_q+gamma_q)i_q right tag4d \nleft beginarrayc i_d i_q endarray right = left beginarraycc r_a -x_q x_d r_a endarray right^-1 left beginarrayc e_d-v_d e_q - v_q endarray right tag4e\np_e approx tau_e = (v_q + r_a i_q)i_q + (v_d + r_ai_d)i_d tag4f\nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"with","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign*\n gamma_d = fracT_d0 x_dT_d0 x_d (x_d - x_d) \n gamma_q = fracT_q0 x_qT_q0 x_q (x_q - x_q)\nendalign*","category":"page"},{"location":"component_models/machines/#Anderson-Fouad-Machine-(6th-Order)-[AndersonFouadMachine]","page":"Machine","title":"Anderson-Fouad Machine (6th Order) [AndersonFouadMachine]","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"The Anderson-Fouad model also defines 6 differential equations, two for stator fluxes and 4 for transient and subtransient emfs and is derived from the Marconato model by defining gamma_d approx gamma_q approx T_AA approx 0:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ndotpsi_d = Omega_b(r_ai_d + omega psi_q + v_d) tag5a \ndotpsi_q = Omega_b(r_ai_q - omega psi_d + v_q) tag5b \ndote_q = frac1T_d0 left-e_q - (x_d-x_d)i_d + v_fright tag5c\ndote_d = frac1T_q0 left-e_d + (x_q-x_q)i_q right tag5d\ndote_q = frac1T_d0 left-e_q + e_q - (x_d-x_d)i_d right tag5e \ndote_d = frac1T_q0 left-e_d + e_d + (x_q-x_q)i_q right tag5f \ni_d = frac1x_d (e_q - psi_d) tag5g \ni_q = frac1x_q (-e_d - psi_q) tag5h \ntau_e = psi_d i_q - psi_q i_d tag5i\nendalign","category":"page"},{"location":"component_models/machines/#Simplified-Anderson-Fouad-Machine-(4th-Order)-[SimpleAFMachine]","page":"Machine","title":"Simplified Anderson-Fouad Machine (4th Order) [SimpleAFMachine]","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"Similar to the Simplified Marconato Model, this model neglects the derivative of stator fluxes (dotpsi_d and dotpsi_q) and assume that the rotor speed stays close to 1 pu (omega psi_d = psi_d and omega psi_q = psi_q) that allows to remove the stator fluxes variables from the model:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ndote_q = frac1T_d0 left-e_q - (x_d-x_d)i_d + v_fright tag6a\ndote_d = frac1T_q0 left-e_d + (x_q-x_q)i_q right tag6b\ndote_q = frac1T_d0 left-e_q + e_q - (x_d-x_d)i_d right tag6c \ndote_d = frac1T_q0 left-e_d + e_d + (x_q-x_q)i_q right tag6d \nleft beginarrayc i_d i_q endarray right = left beginarraycc r_a -x_q x_d r_a endarray right^-1 left beginarrayc e_d-v_d e_q - v_q endarray right tag6e\np_e approx tau_e = (v_q + r_a i_q)i_q + (v_d + r_ai_d)i_d tag6f\nendalign","category":"page"},{"location":"component_models/machines/#Round-Rotor-Machine-(4th-Order)-[RoundRotorQuadratic,-RoundRotorExponential]","page":"Machine","title":"Round Rotor Machine (4th Order) [RoundRotorQuadratic, RoundRotorExponential]","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"This model represents the traditional round rotor models GENROU/GENROE models implemented in PSLF/PSSE/PowerWorld. Similar to the Simplified Marconato Model, this model neglects the derivative of stator fluxes (dotpsi_d and dotpsi_q). Round rotor machines must satisfy x_d = x_q.","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ndote_q = frac1T_d0 leftv_f - X_adI_fdright tag7a\ndote_d = frac1T_q0 left-X_aqI_1q right tag7b\ndotpsi_kd = frac1T_d0 left-psi_kd + e_q - (x_d-x_l)i_d right tag7c \ndotpsi_kq = frac1T_q0 left-psi_kq + e_d + (x_q-x_l)i_q right tag7d \nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"with:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ngamma_d1 = fracx_d - x_lx_d - x_l tag7e\ngamma_q1 = fracx_q - x_lx_q - x_l tag7f\ngamma_d2 = fracx_d - x_d(x_d-x_l)^2 tag7g\ngamma_q2 = fracx_q - x_q(x_q - x_l)^2 tag7h\ngamma_qd = fracx_q - x_lx_d - x_l tag7i\npsi_q = gamma_q1 e_d + psi_kq (1 - gamma_q1) tag7j\npsi_d = gamma_d1 e_q + gamma_d2 (x_d - x_l) psi_kd tag7k\npsi = sqrt(psi_d)^2 + (psi_q)^2 tag7l\nleft beginarrayc i_d i_q endarray right = left beginarraycc -r_a x_q -x_d r_a endarray right^-1 left beginarrayc v_d - psi_q -v_q + psi_d endarray right tag7m\nX_adI_fd = e_q + (x_d - x_d) (gamma_d1 i_d - gamma_d2 psi_kd + gamma_d2 + e_q) + textSe(psi) psi_d tag7n\nX_aqI_1q = e_d + (x_q - x_q) (gamma_q2 e_d - gamma_q2psi_kq - gamma_q1 i_q) + textSe(psi) psi_q gamma_qd tag7o \ntau_e = i_d (r_a i_d + v_d) + i_q(r_a i_q + v_q) tag7p\nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"The difference between GENROU and GENROE occurs in which additive saturation function textSe(psi) is used. Input data is provided by the saturation values at psi = 10 and psi = 12 p.u. For the GENROU model, the function used is:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ntextSe(psi) = fracB(psi - A)^2 psi tag7q\nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"and for the GENROE model the function used is:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ntextSe(psi) = B(psi)^A tag7r\nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"The parameters A and B for each function are computed using the two points given (10 textSe(10)) and (12 textSe(12)).","category":"page"},{"location":"component_models/machines/#Salient-Pole-Machine-(3rd-Order)-[SalientPoleQuadratic,-SalientPoleExponential]","page":"Machine","title":"Salient Pole Machine (3rd Order) [SalientPoleQuadratic, SalientPoleExponential]","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"This model represents the traditional round rotor models GENSAL/GENSAE models implemented in PSLF/PSSE/PowerWorld. Similar to the GENROU Model, this model neglects the derivative of stator fluxes (dotpsi_d and dotpsi_q).","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ndote_q = frac1T_d0 leftv_f - X_adI_fdright tag8a\ndotpsi_kd = frac1T_d0 left-psi_kd + e_q - (x_d-x_l)i_d right tag8b \ndotpsi_q = frac1T_q0 left-psi_q - (x_q-x_q)i_q right tag8c \nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"with:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ngamma_d1 = fracx_d - x_lx_d - x_l tag8d\ngamma_q1 = fracx_q - x_lx_q - x_l tag8e\ngamma_d2 = fracx_d - x_d(x_d-x_l)^2 tag8f\npsi_d = gamma_d1 e_q + gamma_q1 psi_kd tag8g\nleft beginarrayc i_d i_q endarray right = left beginarraycc -r_a x_q -x_d r_a endarray right^-1 left beginarrayc v_d - psi_q -v_q + psi_d endarray right tag8h\nX_adI_fd = e_q + textSe(e_q) e_q + (x_d - x_d) (i_d + gamma_d2 (e_q - psi_kd - (x_d - x_l)i_d) tag8i\ntau_e = i_d (r_a i_d + v_d) + i_q(r_a i_q + v_q) tag8j\nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"The difference between GENSAL and GENSAE occurs in which additive saturation function textSe(e_q) is used. Input data is provided by the saturation values at e_q = 10 and e_q = 12 p.u. For the GENSAL model, the function used is:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ntextSe(e_q) = fracB(e_q - A)^2 e_q tag8k\nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"and for the GENSAE model the function used is:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ntextSe(e_q) = B(e_q)^A tag8l\nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"The parameters A and B for each function are computed using the two points given (10 textSe(10)) and (12 textSe(12)).","category":"page"},{"location":"component_models/machines/#SauerPai-Machine-(6th-Order)-[SauerPaiMachine]","page":"Machine","title":"SauerPai Machine (6th Order) [SauerPaiMachine]","text":"","category":"section"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"The Sauer Pai model defines 6 differential equations as follows:","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign\ndotpsi_d = Omega_b(r_ai_d + omega psi_q + v_d) tag9a \ndotpsi_q = Omega_b(r_ai_q - omega psi_d + v_q) tag9b \ndote_q = frac1T_d0 left(-e_q - (x_d - x_d)(i_d + gamma_d2 cdot dotpsi_d) + v_f)right tag9c\ndote_q = frac1T_q0 left(-e_d + (x_q - x_q)(i_q + gamma_q2 cdot dotpsi_q))right tag9d\ndotpsi_d = frac1T_d0 left(-psi_d + e_q - (x_d - x_l)cdot i_d)right tag9e \ndotpsi_q = frac1T_q0 left(-psi_q - e_d - (x_q - x_l)cdot i_q)right tag9f \ni_d = frac1x_d (gamma_d1 cdot e_q - psi_d + (1 - gamma_d1) * psi_d) tag9g \ni_q = frac1x_q ((-gamma_q1 cdot e_d - psi_q + (1 - gamma_q1) cdot psi_q) tag9h \ntau_e = psi_d i_q - psi_q i_d tag9i\nendalign","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"with","category":"page"},{"location":"component_models/machines/","page":"Machine","title":"Machine","text":"beginalign*\n gamma_d1 = fracx_d - x_lx_d - x_l \n gamma_q1 = fracx_q - x_lx_q - x_l \n gamma_d2 = frac1 - gamma_d1x_d - x_l \n gamma_q2 = frac1 - gamma_q1x_q - x_l\nendalign*","category":"page"},{"location":"component_models/shafts/#Shafts","page":"Shaft","title":"Shafts","text":"","category":"section"},{"location":"component_models/shafts/","page":"Shaft","title":"Shaft","text":"The shaft component defines the rotating mass of the synchronous generator.","category":"page"},{"location":"component_models/shafts/#Rotor-Mass-Shaft-[SingleMass]","page":"Shaft","title":"Rotor Mass Shaft [SingleMass]","text":"","category":"section"},{"location":"component_models/shafts/","page":"Shaft","title":"Shaft","text":"This is the standard model, on which one single mass (typically the rotor) is used to model the entire inertia of the synchronous generator. Each generator's rotating frame use a reference frequency omega_s, that typically is the synchronous one (i.e. omega_s = 10). The model defines two differential equations for the rotor angle delta and the rotor speed omega:","category":"page"},{"location":"component_models/shafts/","page":"Shaft","title":"Shaft","text":"beginalign\ndotdelta = Omega_b(omega - omega_s) tag1a \ndotomega = frac12H(tau_m - tau_e - D(omega-omega_s)) tag1b\nendalign","category":"page"},{"location":"component_models/shafts/#Five-Mass-Shaft-[FiveMassShaft]","page":"Shaft","title":"Five-Mass Shaft [FiveMassShaft]","text":"","category":"section"},{"location":"component_models/shafts/","page":"Shaft","title":"Shaft","text":"This model describes model connecting a high-pressure (hp) steam turbine, intermediate-pressure (ip) steam turbine, low-pressure (lp) steam pressure, rotor and exciter (ex) connected in series (in that order) in the same shaft using a spring-mass model:","category":"page"},{"location":"component_models/shafts/","page":"Shaft","title":"Shaft","text":"beginalign\ndotdelta = Omega_b(omega - omega_s) tag2a \ndotomega = frac12H left- tau_e - D(omega-omega_s)) - D_34 (omega-omega_lp) - D_45(omega-omega_ex) + K_lp(delta_lp-delta) +K_ex(delta_ex-delta) right tag2b \ndotdelta_hp = Omega_b(omega_hp - omega_s) tag2c \ndotomega_hp = frac12H_hp left tau_m - D_hp(omega_hp-omega_s) - D_12(omega_hp - omega_ip) + K_hp(delta_ip - delta_hp) right tag2d \ndotdelta_ip = Omega_b(omega_ip - omega_s) tag2e \ndotomega_ip = frac12H_ip left- D_ip(omega_ip-omega_s) - D_12(omega_ip - omega_hp) -D_23(omega_ip - omega_lp ) + K_hp(delta_hp - delta_ip) + K_ip(delta_lp-delta_ip) right tag2f \ndotdelta_lp = Omega_b(omega_lp-omega_s) tag2g \ndotomega_lp = frac12H_lp left - D_lp(omega_lp-omega_s) - D_23(omega_lp - omega_ip) -D_34(omega_lp - omega ) + K_ip(delta_ip - delta_lp) + K_lp(delta-delta_lp) right tag2h \ndotdelta_ex = Omega_b(omega_ex-omega_s) tag2i \ndotomega_ex = frac12H_ex left - D_ex(omega_ex-omega_s) - D_45(omega_ex - omega) + K_ex(delta - delta_ex) right tag2j\nendalign","category":"page"},{"location":"api/public/#PowerSimulationsDynamics","page":"Public API Reference","title":"PowerSimulationsDynamics","text":"","category":"section"},{"location":"api/public/","page":"Public API Reference","title":"Public API Reference","text":"CurrentModule = PowerSimulationsDynamics\nDocTestSetup = quote\n using PowerSimulationsDynamics\nend","category":"page"},{"location":"api/public/","page":"Public API Reference","title":"Public API Reference","text":"Modules = [PowerSimulationsDynamics]\nPublic = true\nPrivate = false","category":"page"},{"location":"api/public/#PowerSimulationsDynamics.BranchImpedanceChange","page":"Public API Reference","title":"PowerSimulationsDynamics.BranchImpedanceChange","text":"mutable struct BranchImpedanceChange <: Perturbation\n time::Float64\n branch_type::Type{<:PSY.ACBranch}\n branch_name::String\n multiplier::Float64\nend\n\nA BranchImpedanceChange change the impedance of a branch by a user defined multiplier. Currently there is only support for static branches disconnection, PowerSystems.Line and PowerSystems.Transformer2W. Future releases will provide support for a Dynamic Line disconnection.\n\nArguments:\n\ntime::Float64 : Defines when the Branch Impedance Change will happen. This time should be inside the time span considered in the Simulation\nbranch_tipe::Type{<:PowerSystems.ACBranch} : Type of branch modified\nbranch_name::String : User defined name for identifying the branch\nmultiplier::Float64 : User defined value for impedance multiplier.\n\n\n\n\n\n","category":"type"},{"location":"api/public/#PowerSimulationsDynamics.BranchTrip","page":"Public API Reference","title":"PowerSimulationsDynamics.BranchTrip","text":"mutable struct BranchTrip <: Perturbation\n time::Float64\n branch_type::Type{<:PowerSystems.ACBranch}\n branch_name::String\nend\n\nA BranchTrip completely disconnects a branch from the system. Currently there is only support for static branches disconnection, PowerSystems.Line and PowerSystems.Transformer2W. Future releases will provide support for a Dynamic Line disconnection. Note: Islanding is currently not supported in PowerSimulationsDynamics.jl. If a BranchTrip isolates a generation unit, the system may diverge due to the isolated generator.\n\nArguments:\n\ntime::Float64 : Defines when the Branch Trip will happen. This time should be inside the time span considered in the Simulation\nbranch_tipe::Type{<:PowerSystems.ACBranch} : Type of branch disconnected\nbranch_name::String : User defined name for identifying the branch\n\n\n\n\n\n","category":"type"},{"location":"api/public/#PowerSimulationsDynamics.ControlReferenceChange","page":"Public API Reference","title":"PowerSimulationsDynamics.ControlReferenceChange","text":"mutable struct ControlReferenceChange <: Perturbation\n time::Float64\n device::PowerSystems.DynamicInjection\n signal::Symbol\n ref_value::Float64\nend\n\nA ControlReferenceChange allows to change the reference setpoint provided by a generator/inverter.\n\nArguments:\n\ntime::Float64 : Defines when the Control Reference Change will happen. This time should be inside the time span considered in the Simulation\ndevice::Type{<:PowerSystems.DynamicInjection} : Dynamic device modified\nsignal::Symbol : determines which reference setpoint will be modified. The accepted signals are:\n:P_ref: Modifies the active power reference setpoint.\n:V_ref: Modifies the voltage magnitude reference setpoint (if used).\n:Q_ref: Modifies the reactive power reference setpoint (if used).\n:ω_ref: Modifies the frequency setpoint.\nref_value::Float64 : User defined value for setpoint reference.\n\n\n\n\n\n","category":"type"},{"location":"api/public/#PowerSimulationsDynamics.GeneratorTrip","page":"Public API Reference","title":"PowerSimulationsDynamics.GeneratorTrip","text":"mutable struct GeneratorTrip <: Perturbation\n time::Float64\n device::PowerSystems.DynamicInjection\nend\n\nA GeneratorTrip allows to disconnect a Dynamic Generation unit from the system at a specified time.\n\nArguments:\n\ntime::Float64 : Defines when the Generator Trip will happen. This time should be inside the time span considered in the Simulation\ndevice::Type{<:PowerSystems.DynamicInjection} : Device to be disconnected\n\n\n\n\n\n","category":"type"},{"location":"api/public/#PowerSimulationsDynamics.LoadChange","page":"Public API Reference","title":"PowerSimulationsDynamics.LoadChange","text":"mutable struct LoadChange <: Perturbation\n time::Float64\n device::PowerSystems.ElectricLoad\n signal::Symbol\n ref_value::Float64\nend\n\nA LoadChange allows to change the active or reactive power setpoint from a load.\n\nArguments:\n\ntime::Float64 : Defines when the Load Change will happen. This time should be inside the time span considered in the Simulation\ndevice::Type{<:PowerSystems.ElectricLoad} : Dynamic device modified\nsignal::Symbol : determines which reference setpoint will be modified. The accepted signals are:\n:P_ref: Modifies the active power reference setpoint.\n:Q_ref: Modifies the reactive power reference setpoint.\nref_value::Float64 : User defined value for setpoint reference.\n\n\n\n\n\n","category":"type"},{"location":"api/public/#PowerSimulationsDynamics.LoadTrip","page":"Public API Reference","title":"PowerSimulationsDynamics.LoadTrip","text":"mutable struct LoadTrip <: Perturbation\n time::Float64\n device::PowerSystems.ElectricLoad\nend\n\nA LoadTrip allows the user to disconnect a load from the system.\n\nArguments:\n\ntime::Float64 : Defines when the Generator Trip will happen. This time should be inside the time span considered in the Simulation\ndevice::Type{<:PowerSystems.ElectricLoad} : Device to be disconnected\n\n\n\n\n\n","category":"type"},{"location":"api/public/#PowerSimulationsDynamics.MassMatrixModel-Union{Tuple{Ctype}, Tuple{Any, Vector{Float64}, Type{Ctype}}} where Ctype<:PowerSimulationsDynamics.SimCache","page":"Public API Reference","title":"PowerSimulationsDynamics.MassMatrixModel","text":"Instantiate a MassMatrixModel for ODE inputs.\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.MassMatrixModel-Union{Tuple{Ctype}, Tuple{T}, Tuple{PowerSimulationsDynamics.SimulationInputs, Vector{T}, Type{Ctype}}} where {T<:Float64, Ctype<:PowerSimulationsDynamics.JacobianCache}","page":"Public API Reference","title":"PowerSimulationsDynamics.MassMatrixModel","text":"Instantiate a MassMatrixModel for ForwardDiff calculations\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.NetworkSwitch","page":"Public API Reference","title":"PowerSimulationsDynamics.NetworkSwitch","text":"function NetworkSwitch(\n time::Float64,\n ybus::SparseArrays.SparseMatrixCSC{Complex{Float64}, Int},\n)\n\nAllows to modify directly the admittance matrix, Ybus, used in the Simulation. This allows the user to perform branch modifications, three phase faults (with impedance larger than zero) or branch trips, as long as the new Ybus provided captures that perturbation.\n\nArguments:\n\ntime::Float64 : Defines when the Network Switch will happen. This time should be inside the time span considered in the Simulation\nybus::SparseArrays.SparseMatrixCSC{Complex{Float64}, Int} : Complex admittance matrix\n\n\n\n\n\n","category":"type"},{"location":"api/public/#PowerSimulationsDynamics.PerturbState","page":"Public API Reference","title":"PowerSimulationsDynamics.PerturbState","text":"function PerturbState(\n time::Float64,\n index::Int,\n value::Float64,\n)\n\nAllows the user to modify the state index by adding value. The user should modify dynamic states only, since algebraic state may require to do a reinitialization.\n\nArguments:\n\ntime::Float64 : Defines when the modification of the state will happen. This time should be inside the time span considered in the Simulation.\nindex::Int : Defines which state index you want to modify\nvalue::Float64 : Defines how much the state will increase in value\n\n\n\n\n\n","category":"type"},{"location":"api/public/#PowerSimulationsDynamics.ResidualModel-Union{Tuple{Ctype}, Tuple{Any, Vector{Float64}, Type{Ctype}}} where Ctype<:PowerSimulationsDynamics.SimCache","page":"Public API Reference","title":"PowerSimulationsDynamics.ResidualModel","text":"Instantiate an ResidualModel for ODE inputs.\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.ResidualModel-Union{Tuple{Ctype}, Tuple{T}, Tuple{PowerSimulationsDynamics.SimulationInputs, Vector{T}, Type{Ctype}}} where {T<:Float64, Ctype<:PowerSimulationsDynamics.JacobianCache}","page":"Public API Reference","title":"PowerSimulationsDynamics.ResidualModel","text":"Instantiate an ResidualModel for ForwardDiff calculations\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.Simulation-Union{Tuple{T}, Tuple{Type{T}, System, String, Tuple{Float64, Float64}}, Tuple{Type{T}, System, String, Tuple{Float64, Float64}, Vector{<:PowerSimulationsDynamics.Perturbation}}} where T<:PowerSimulationsDynamics.SimulationModel","page":"Public API Reference","title":"PowerSimulationsDynamics.Simulation","text":"function Simulation\n ::SimulationModel\n system::PowerSystems.System\n simulation_folder::String\n tspan::NTuple{2, Float64},\n perturbations::Vector{<:Perturbation} = Vector{Perturbation}();\n kwargs...,\nend\n\nBuilds the simulation object and conducts the indexing process. The original system is not modified and a copy its created and stored in the Simulation.\n\nArguments:\n\n::SimulationModel : Type of Simulation Model. ResidualModel or MassMatrixModel. See Models Section for more details\nsystem::PowerSystems.System : System data\nsimulation_folder::String : Folder directory\ntspan::NTuple{2, Float64} : Time span for simulation\nperturbations::Vector{<:Perturbation} : Vector of Perturbations for the Simulation. Default: No Perturbations\ninitialize_simulation::Bool : Runs the initialization routine. If false, simulation runs based on the operation point stored in System\ninitial_conditions::Vector{Float64} : Allows the user to pass a vector with the initial condition values desired in the simulation. If initialize_simulation = true, these values are used as a first guess and overwritten.\nfrequency_reference : Default ReferenceBus. Determines which frequency model is used for the network. Currently there are two options available:\nConstantFrequency assumes that the network frequency is 1.0 per unit at all times.\nReferenceBus will use the frequency state of a Dynamic Generator (rotor speed) or Dynamic Inverter (virtual speed) connected to the Reference Bus (defined in the Power Flow data) as the network frequency. If multiple devices are connected to such bus, the device with larger base power will be used as a reference. If a Voltage Source is connected to the Reference Bus, then a ConstantFrequency model will be used.\nsystem_to_file::Bool : Default false. Serializes the initialized system\nconsole_level::Logging : Default Logging.Warn. Sets the level of logging output to the console. Can be set to Logging.Error, Logging.Warn, Logging.Info or Logging.Debug\nfile_level::Logging : Default Logging.Info. Sets the level of logging output to file. Can be set to Logging.Error, Logging.Warn, Logging.Info or Logging.Debug\ndisable_timer_outputs::Bool : Default false. Allows the user to display timer information about the construction and initilization of the Simulation.\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.SourceBusVoltageChange","page":"Public API Reference","title":"PowerSimulationsDynamics.SourceBusVoltageChange","text":"mutable struct SourceBusVoltageChange <: Perturbation\n time::Float64\n device::PSY.Source\n signal::Symbol\n ref_value::Float64\nend\n\nA SourceBusVoltageChange allows to change the reference setpoint provided by a voltage source.\n\nArguments:\n\ntime::Float64 : Defines when the Control Reference Change will happen. This time should be inside the time span considered in the Simulation\ndevice::Type{<:PowerSystems.Source} : Device modified\nsignal::Symbol : determines which reference setpoint will be modified. The accepted signals are:\n:V_ref Modifies the internal voltage magnitude reference setpoint.\n:θ_ref Modifies the internal voltage angle reference setpoint.\nref_value::Float64 : User defined value for setpoint reference.\n\n\n\n\n\n","category":"type"},{"location":"api/public/#PowerSimulationsDynamics.Simulation!-Union{Tuple{T}, Tuple{Type{T}, System, String, Tuple{Float64, Float64}}, Tuple{Type{T}, System, String, Tuple{Float64, Float64}, Vector{<:PowerSimulationsDynamics.Perturbation}}} where T<:PowerSimulationsDynamics.SimulationModel","page":"Public API Reference","title":"PowerSimulationsDynamics.Simulation!","text":"function Simulation!\n ::SimulationModel\n system::PowerSystems.System\n simulation_folder::String\n tspan::NTuple{2, Float64},\n perturbations::Vector{<:Perturbation} = Vector{Perturbation}();\n kwargs...,\nend\n\nBuilds the simulation object and conducts the indexing process. The initial conditions are stored in the system.\n\nArguments:\n\n::SimulationModel : Type of Simulation Model. ResidualModel or MassMatrixModel. See Models Section for more details\nsystem::PowerSystems.System : System data\nsimulation_folder::String : Folder directory\ntspan::NTuple{2, Float64} : Time span for simulation\nperturbations::Vector{<:Perturbation} : Vector of Perturbations for the Simulation. Default: No Perturbations\ninitialize_simulation::Bool : Runs the initialization routine. If false, simulation runs based on the operation point stored in System\ninitial_conditions::Vector{Float64} : Allows the user to pass a vector with the initial condition values desired in the simulation. If initialize_simulation = true, these values are used as a first guess and overwritten.\nfrequency_reference : Default ReferenceBus. Determines which frequency model is used for the network. Currently there are two options available:\nConstantFrequency assumes that the network frequency is 1.0 per unit at all times.\nReferenceBus will use the frequency state of a Dynamic Generator (rotor speed) or Dynamic Inverter (virtual speed) connected to the Reference Bus (defined in the Power Flow data) as the network frequency. If multiple devices are connected to such bus, the device with larger base power will be used as a reference. If a Voltage Source is connected to the Reference Bus, then a ConstantFrequency model will be used.\nsystem_to_file::Bool : Default false. Serializes the initialized system\nconsole_level::Logging : Default Logging.Warn. Sets the level of logging output to the console. Can be set to Logging.Error, Logging.Warn, Logging.Info or Logging.Debug\nfile_level::Logging : Default Logging.Info. Sets the level of logging output to file. Can be set to Logging.Error, Logging.Warn, Logging.Info or Logging.Debug\ndisable_timer_outputs::Bool : Default false. Allows the user to display timer information about the construction and initilization of the Simulation.\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.execute!-Tuple{Simulation, Any}","page":"Public API Reference","title":"PowerSimulationsDynamics.execute!","text":"execute!(\n sim::Simulation,\n solver;\n kwargs...\n)\n\nSolves the time-domain dynamic simulation model.\n\nArguments\n\nsim::Simulation : Initialized simulation object\nsolver : Solver used for numerical integration. Must be passed correctly depending on the Type of Simulation Model\nenable_progress_bar::Bool : Default: true. Enables progress bar for the integration routine.\nAdditional solver keyword arguments can be included. See Common Solver Options in the DifferentialEquations.jl documentation for more details.\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_activepower_branch_flow-Tuple{SimulationResults, String, Symbol}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_activepower_branch_flow","text":"get_activepower_branch_flow(\n res::SimulationResults,\n name::String,\n location::Symbol,\n)\n\nFunction to obtain the active power flowing through the series element of a Branch. The user must specified is the power should be computed in the :from or to :bus, by specifying a symbol.\n\nIf :from is specified, the power is computed flowing outwards the :from bus. If :to is specified, the power is computed flowing into the :to bus.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified line\nlocation::Symbol : :from or :to to specify a bus\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_activepower_series-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_activepower_series","text":"get_activepower_series(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the active power output time series of a Dynamic Injection series out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified device\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_field_current_series-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_field_current_series","text":"get_field_current_series(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the field current time series of a Dynamic Generator out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified device\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_field_voltage_series-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_field_voltage_series","text":"get_field_voltage_series(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the field voltage time series of a Dynamic Generator out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified device\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_frequency_series-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_frequency_series","text":"get_frequency_series(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the frequency time series of a Dynamic Injection out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified device\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_imaginary_current_branch_flow-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_imaginary_current_branch_flow","text":"get_imaginary_current_branch_flow(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the imaginary current flowing through the series element of a Branch\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified line\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_imaginary_current_series-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_imaginary_current_series","text":"get_imaginary_current_series(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the imaginary current time series of a Dynamic Injection series out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified device\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_jacobian-Union{Tuple{T}, Tuple{Type{T}, System}, Tuple{Type{T}, System, Int64}} where T<:PowerSimulationsDynamics.SimulationModel","page":"Public API Reference","title":"PowerSimulationsDynamics.get_jacobian","text":"function get_jacobian(\n::Type{T},\nsystem::PSY.System,\nsparse_retrieve_loop::Int = 3,\n) where {T <: SimulationModel}\n\nReturns the jacobian function of the system model resulting from the system data.\n\nArguments:\n\n::SimulationModel : Type of Simulation Model. ResidualModel or MassMatrixModel. See Models Section for more details\nsystem::PowerSystems.System : System data\nsparse_retrieve_loop::Int : Number of loops for sparsity detection. If 0, builds the Jacobian with a DenseMatrix\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_mechanical_torque_series-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_mechanical_torque_series","text":"get_mechanical_torque_series(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the mechanical torque time series of the mechanical torque out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified device\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_pss_output_series-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_pss_output_series","text":"get_pss_output_series(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the pss output time series of a Dynamic Generator out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified device\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_reactivepower_branch_flow-Tuple{SimulationResults, String, Symbol}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_reactivepower_branch_flow","text":"get_reactivepower_branch_flow(\n res::SimulationResults,\n name::String,\n location::Symbol,\n)\n\nFunction to obtain the reactive power flowing through the series element of a Branch. The user must specified is the power should be computed in the :from or to :bus, by specifying a symbol.\n\nIf :from is specified, the power is computed flowing outwards the :from bus. If :to is specified, the power is computed flowing into the :to bus.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified line\nlocation::Symbol : :from or :to to specify a bus\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_reactivepower_series-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_reactivepower_series","text":"get_reactivepower_series(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the reactive power output time series of a Dynamic Injection series out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified device\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_real_current_branch_flow-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_real_current_branch_flow","text":"get_real_current_branch_flow(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the real current flowing through the series element of a Branch\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified line\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_real_current_series-Tuple{SimulationResults, String}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_real_current_series","text":"get_real_current_series(\n res::SimulationResults,\n name::String,\n)\n\nFunction to obtain the real current time series of a Dynamic Injection series out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nname::String : Name to identify the specified device\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_setpoints-Tuple{Simulation}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_setpoints","text":"get_setpoints(sim::Simulation)\n\nFunction that returns the reference setpoints for all the dynamic devices.\n\nArguments\n\nsim::Simulation : Simulation object that contains the initial condition and setpoints.\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_source_imaginary_current_series","page":"Public API Reference","title":"PowerSimulationsDynamics.get_source_imaginary_current_series","text":"Function to obtain output imaginary current for a source. It receives the simulation results, the Source name and an optional argument of the time step of the results.\n\n\n\n\n\n","category":"function"},{"location":"api/public/#PowerSimulationsDynamics.get_source_real_current_series","page":"Public API Reference","title":"PowerSimulationsDynamics.get_source_real_current_series","text":"Function to obtain output real current for a source. It receives the simulation results, the Source name and an optional argument of the time step of the results.\n\n\n\n\n\n","category":"function"},{"location":"api/public/#PowerSimulationsDynamics.get_state_series-Tuple{SimulationResults, Tuple{String, Symbol}}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_state_series","text":"get_state_series(\n res::SimulationResults,\n ref::Tuple{String, Symbol};\n dt::Union{Nothing, Float64, Vector{Float64}} = nothing\n)\nend\n\nFunction to obtain series of states out of DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nref:Tuple{String, Symbol} : Tuple used to identify the dynamic device, via its name, as a String, and the associated state as a Symbol.\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_voltage_angle_series-Tuple{SimulationResults, Int64}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_voltage_angle_series","text":"get_voltage_angle_series(\n res::SimulationResults,\n bus_number::Int\n)\n\nFunction to obtain the voltage angle series out of the DAE Solution.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\nbus_number::Int : Bus number identifier\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.get_voltage_magnitude_series-Tuple{SimulationResults, Int64}","page":"Public API Reference","title":"PowerSimulationsDynamics.get_voltage_magnitude_series","text":"get_voltage_magnitude_series(\n res::SimulationResults,\n bus_number::Int\n)\n\nFunction to obtain the voltage magnitude series out of the DAE Solution.\n\nArguments:\n\nres::SimulationResults : Simulation Results object that contains the solution\nbus_number::Int : Bus number identifier\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.read_initial_conditions-Tuple{Simulation}","page":"Public API Reference","title":"PowerSimulationsDynamics.read_initial_conditions","text":"Returns a Dictionary with the resulting initial conditions of the simulation\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.show_states_initial_value-Tuple{SimulationResults}","page":"Public API Reference","title":"PowerSimulationsDynamics.show_states_initial_value","text":"show_states_initial_value(res::SimulationResults)\n\nFunction to print initial states.\n\nArguments\n\nres::SimulationResults : Simulation Results object that contains the solution\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.show_states_initial_value-Tuple{Simulation}","page":"Public API Reference","title":"PowerSimulationsDynamics.show_states_initial_value","text":"show_states_initial_value(sim::Simulation)\n\nFunction to print initial states.\n\nArguments\n\nsim::Simulation : Simulation object that contains the initial condition\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.small_signal_analysis-Union{Tuple{Simulation{T}}, Tuple{T}} where T<:PowerSimulationsDynamics.SimulationModel","page":"Public API Reference","title":"PowerSimulationsDynamics.small_signal_analysis","text":"small_signal_analysis(\n sim::Simulation,\n)\n\nReturns the Small Signal Output object that contains the eigenvalues and participation factors.\n\nArguments\n\nsim::Simulation : Small Signal Output object that contains the eigenvalues and participation factors\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.summary_eigenvalues-Tuple{PowerSimulationsDynamics.SmallSignalOutput}","page":"Public API Reference","title":"PowerSimulationsDynamics.summary_eigenvalues","text":"summary_eigenvalues(\n sm::SmallSignalOutput,\n)\n\nFunction to obtain a summary of the eigenvalues of the Jacobian at the operating point. It returns a DataFrame with the most associated state for each eigenvalue, its real and imaginary part, damping and frequency.\n\nArguments\n\nsm::SmallSignalOutput : Small Signal Output object that contains the eigenvalues and participation factors\n\n\n\n\n\n","category":"method"},{"location":"api/public/#PowerSimulationsDynamics.summary_participation_factors-Tuple{PowerSimulationsDynamics.SmallSignalOutput}","page":"Public API Reference","title":"PowerSimulationsDynamics.summary_participation_factors","text":"summary_participation_factors(\n sm::SmallSignalOutput,\n)\n\nFunction to obtain the participation factor of each state to each eigenvalue. It returns a DataFrame with the participation factors of each state to all eigenvalues.\n\nArguments\n\nsm::SmallSignalOutput : Small Signal Output object that contains the eigenvalues and participation factors\n\n\n\n\n\n","category":"method"},{"location":"component_models/network/#Network-model","page":"Network","title":"Network model","text":"","category":"section"},{"location":"component_models/network/","page":"Network","title":"Network","text":"Here we discuss the models used to describe the network in PowerSimulationsDynamics.jl. This is based on a standard current injection model as defined in Power System Modelling and Scripting. The numerical advantages of current injection models outweigh the complexities of implementing constant power loads for longer-term transient stability analysis. The network is defined in a synchronous reference frame (SRF), named the RI (real-imaginary) reference frame, rotating at the constant base frequency Omega_b.","category":"page"},{"location":"component_models/network/","page":"Network","title":"Network","text":"In simple terms, PowerSimulationsDynamics.jl internally tracks the current-injection balances at the nodal level from all the devices on the system. Based on the buses and branches information, the system constructor computes the admittance matrix boldsymbolY assuming nominal frequency and this is used for static branch modeling. The algebraic equations for the static portions of the network are as follows:","category":"page"},{"location":"component_models/network/","page":"Network","title":"Network","text":" beginalign\n 0 = boldsymboli(boldsymbolx boldsymbolv) - boldsymbolYboldsymbolv\n endalign","category":"page"},{"location":"component_models/network/","page":"Network","title":"Network","text":"where boldsymboli = i_r + ji_i is the vector of the sum of complex current injections from devices , boldsymbolx is the vector of states and boldsymbolv = v_r + jv_i is the vector of complex bus voltages. Equations (1) connect all the port variables, i.e., currents, defined for each injection device. Components that contribute to (1) by modifying the current boldsymboli are (i) static injection devices, (ii) dynamic injection devices, and (iii) dynamic network branches. Components that contribute to modify the admittance matrix boldsymbolY are static branches.","category":"page"},{"location":"component_models/network/#Static-Branches-(or-Algebraic-Branches)","page":"Network","title":"Static Branches (or Algebraic Branches)","text":"","category":"section"},{"location":"component_models/network/#Lines","page":"Network","title":"Lines","text":"","category":"section"},{"location":"component_models/network/","page":"Network","title":"Network","text":"Each line is defined using a pi model connecting two buses (nm), with a series resistance r and reactance x, and a shunt capacitance at both ends (c_n c_m). The values are already in system per unit. Then each branch contributes to the admittance matrix as follows:","category":"page"},{"location":"component_models/network/","page":"Network","title":"Network","text":"beginalign\nY_nn += frac1r+jx + jc_n \nY_nm += frac-1r+jx \nY_mm += frac1r+jx + jc_m \nY_mn += frac-1r+jx \nendalign","category":"page"},{"location":"component_models/network/#Two-Windings-Transformers","page":"Network","title":"Two-Windings Transformers","text":"","category":"section"},{"location":"component_models/network/","page":"Network","title":"Network","text":"Similarly to lines these are defined by a series reactance and impedance. The equations are equivalently of the lines without the shunt capacitance.","category":"page"},{"location":"component_models/network/#Dynamic-Branches","page":"Network","title":"Dynamic Branches","text":"","category":"section"},{"location":"component_models/network/","page":"Network","title":"Network","text":"Dynamic network branches contribute directly to (1) by modifying the vector of complex currents. Their parameters are also the series resistance r and reactance x, and a shunt capacitance at both ends (c_n c_m) for a line ell. In addition, they define 3 new additional differential equations per line (6 in total for real and imaginary part):","category":"page"},{"location":"component_models/network/","page":"Network","title":"Network","text":"beginalign\n fraclOmega_b fracdboldsymboli_elldt = (boldsymbolv_n - boldsymbolv_m) - (r+jl) boldsymboli_ell \n fracc_nOmega_b fracdboldsymbolv_ndt = boldsymboli_n^textcap - jc_nboldsymbolv_n \n fracc_mOmega_b fracdboldsymbolv_mdt = boldsymboli_m^textcap - jc_mboldsymbolv_m\nendalign","category":"page"},{"location":"component_models/network/","page":"Network","title":"Network","text":"Since all the values are in per unit, the reactance is equal to the inductance.","category":"page"},{"location":"component_models/network/","page":"Network","title":"Network","text":"A detail discussion about the effects of different line models in the modeling of inverters is presented in Grid Forming Inverter Small Signal Stability: Examining Role of Line and Voltage Dynamics","category":"page"},{"location":"component_models/pss/#Power-System-Stabilizers-(PSS)","page":"PSS","title":"Power System Stabilizers (PSS)","text":"","category":"section"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"PSS are used to add an additional signal v_s to the input signal of the AVR: v_textref = v_textref^textavr + v_s.","category":"page"},{"location":"component_models/pss/#Fixed-PSS-[PSSFixed]","page":"PSS","title":"Fixed PSS [PSSFixed]","text":"","category":"section"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"This is a simple model that set the stabilization signal to be equal to a desired constant value v_s = v_s^textfix. The absence of PSS can be modelled using this component with v_s^textfix = 0.","category":"page"},{"location":"component_models/pss/#Simple-PSS-[PSSSimple]","page":"PSS","title":"Simple PSS [PSSSimple]","text":"","category":"section"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"This is the most basic PSS that can be implemented, on which the stabilization signal is a proportional controller over the frequency and electrical power:","category":"page"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"beginalign\nv_s = K_omega(omega - omega_s) + K_p(omega tau_e - P_textref) tag1a\nendalign","category":"page"},{"location":"component_models/pss/#IEEE-Stabilizer-[IEEEST]","page":"PSS","title":"IEEE Stabilizer [IEEEST]","text":"","category":"section"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"The 7th-order PSS model is:","category":"page"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"beginalign\nA_4 dotx_1 = u - A_3 x_1 - x_2 tag2a \ndotx_2 = x_1 tag2b \nA_2dotx_3 = x_2 - A_1 x_3 - x_4 tag2c\ndotx_4 = x_3 tag2d\nT_2dotx_5 = left(1 - fracT_1T_2right) y_f - x_5 tag2e\nT_4dotx_6 = left(1 - fracT_3T_4right) y_LL1 - x_6 tag2f\nT_6dotx_7 = -left(fracK_s T_5T_6 y_LL2 + x_7 right) tag2g\nendalign","category":"page"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"with","category":"page"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"beginalign*\ny_f = fracT_4T_2 x_2 + left(T_3 - T_1 fracT_4T_2right) x_3 + left(1 - fracT_4T_2right)x_4 \ny_LL1 = x_5 + fracT_1T_2 y_f \ny_LL2 = x_6 + fracT_3T_4 y_LL1 \ny_out = x_7 + fracK_s T_5T_6 y_LL2 \nV_s = textclamp(y_out textLs_textmin textLs_textmax)\nendalign*","category":"page"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"on which u is the input signal to the PSS, that depends on the flag. Currently, rotor speed, electric torque, mechanical torque and voltage magnitude are supported inputs.","category":"page"},{"location":"component_models/pss/#STAB1-PSS-[STAB1]","page":"PSS","title":"STAB1 PSS [STAB1]","text":"","category":"section"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"The 3rd-order PSS model is:","category":"page"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"beginalign\nT dotx_1 = K omega - x_1 tag3a \nT_3dotx_2 = left(1 - fracT_1T_3right) x_1 - x_2 tag3b \nT_4dotx_3 = left(1 - fracT_2T_4right) y_LL - x_2 tag3c \nendalign","category":"page"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"with","category":"page"},{"location":"component_models/pss/","page":"PSS","title":"PSS","text":"beginalign*\ny_LL = x_2 + fracT_1T_3 x_1 \ny_out = x_3 + fracT_2T_4 y_LL \nV_s = textclamp(y_out -H_lim H_lim)\nendalign*","category":"page"},{"location":"initialization/#Initialization-Routine","page":"Initialization","title":"Initialization Routine","text":"","category":"section"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"Dynamic Simulations require a reasonable initial condition for the system model. In most analysis, power systems models are initialized at a stable equilibrium, which implies that:","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"beginalign\n0 = F(x u eta)\nendalign","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"Finding the solution of a large non-linear system is challenging and requires a reasonable initial guess. In classical power systems literature, the routine to find equilibrium points for the dynamic injection devices' components is well known and used in free and commercial software (see Power System Modelling and Scripting page 224). However, in the case of converter interface dynamic injection models, such routines are not documented.","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"Initializing the system also requires finding valid set-points for the devices in the system. For instance, finding the reference voltage in an AVR to match the voltage magnitude resulting from the power flow solution. PowerSimulationsDynamics.jl prioritizes mathching the dynamic components control references to match the power flow results.","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"Finally, the initialization must instantiate not only the values of the states but also the inner vars. PowerSimulationsDynamics.jl handles all this initializations by default.","category":"page"},{"location":"initialization/#Initialization-interface","page":"Initialization","title":"Initialization interface","text":"","category":"section"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"By default PowerSimulationsDynamics.jl initializes the system following the steps described below. it is possible to provide an initial guess for the initial conditions to speed up the initialization process.","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"Simulation(\n ResidualModel,\n sys,\n pwd(),\n (0.0, 20.0);\n initial_conditions = x0_init,\n )","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"It is also possible to initialize the simulation using a flat start (V_mag = 1.0, V_angle = 0.0 and x0 = zeros) using initialize_simulation = false. However, for medium or large system this is unlikely to result in a valid initial condition for the simulation.","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"Simulation(\n ResidualModel,\n sys,\n pwd(),\n (0.0, 20.0);\n initialize_simulation = false,\n )","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"If you want to avoid PowerSimulationsDynamics.jl from finding an stable equilibrium automatically and provide the initial condition manually you can use the following flag combination.","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"Simulation(\n ResidualModel,\n sys,\n pwd(),\n (0.0, 20.0);\n initialize_simulation = false,\n initial_conditions = x0_init,\n )","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":" ","category":"page"},{"location":"initialization/#Initialization-of-the-Synchronous-Machines","page":"Initialization","title":"Initialization of the Synchronous Machines","text":"","category":"section"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"The initialization of Synchronous Machines is standard in power systems and follows the scheme shown in the figure. Other internal variables are calculated recursively from the power flow solution for the node on which the dynamic device isconnected. (Adapted from Power System Modelling and Scripting Figure 9.2)","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"(Image: init_machine)","category":"page"},{"location":"initialization/#Initialization-of-the-Inverters","page":"Initialization","title":"Initialization of the Inverters","text":"","category":"section"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"Initializing the inverters follows the sequence shown in the figure and has been developed to be compatible with the implementation of custom dynamic components. Given that the process is less studied and standard than the one of the synchronous machine, this page contains more detailed documentation of the process.","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"(Image: init_machine)","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"The first component to be initialized is the filter. Given that the filter is an RLC circuit connected to the grid, its currents and voltages need to match the results of the power flow. The initialization of the filter provides the values for the P and Q used in the outer control and the V and I needed in the inner controls.\nBased on the bus voltage in the system's reference frame V_r and the bus angle theta the PLL's can be initialized to obtain the angle and frequency estimates needed by the outer control.\nThe Outer Control calculates the internal angle delta_olc required by the inner control to estimate the voltage and current phase difference.\nThe DC Source uses the power set-point consistent with the power outputs of the filter to initialize the V_dc set-points. This value is used in the inner control.\nThe inner control takes the phase angle delta_olc and the V_dc to estimate the modulation values of the PWM converter.","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"Note: The initialization of an inverter through the proposed meta-model is actively under development and subject to change. This page will maintain the latest version of the sequence.","category":"page"},{"location":"tutorials_page/#SIIP-Examples","page":"SIIP-Examples","title":"SIIP-Examples","text":"","category":"section"},{"location":"tutorials_page/","page":"SIIP-Examples","title":"SIIP-Examples","text":"All the tutorials for the SIIP project are part of a separate repository SIIP-Examples. You can access the latest PowerSimulationsDynamics.jl tutorial notebooks in this link","category":"page"},{"location":"tutorials_page/","page":"SIIP-Examples","title":"SIIP-Examples","text":"Specific examples of common workflows and models:","category":"page"},{"location":"tutorials_page/","page":"SIIP-Examples","title":"SIIP-Examples","text":"Loading Dynamic Data\nSolving a One Machine against Infinite Bus model\nChanging line modeling assumptions\nUsing an Inverter in a Multi-Machine Model","category":"page"},{"location":"tutorials/tutorial_continuation_pf/#Tutorial-Small-Signal-Analysis-with-Continuation-Power-Flow","page":"Small-Signal Analysis","title":"Tutorial Small Signal Analysis with Continuation Power Flow","text":"","category":"section"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"Originally Contributed by: Rodrigo Henriquez-Auba","category":"page"},{"location":"tutorials/tutorial_continuation_pf/#Introduction","page":"Small-Signal Analysis","title":"Introduction","text":"","category":"section"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"This tutorial will introduce you to the functionality of PowerSimulationsDynamics and PowerFlows for running small signal analysis in a continuation power flow.","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"This tutorial presents a simulation of a two-bus system with a generator (represented with a GENROU + SEXS + TGOV1 model) at bus 1, and a load on bus 2. We will increase the load demand to observe the P-V curve and run a small-signal analysis to check if the system satisfies small-signal stability at different operating points.","category":"page"},{"location":"tutorials/tutorial_continuation_pf/#Dependencies","page":"Small-Signal Analysis","title":"Dependencies","text":"","category":"section"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"using PowerSimulationsDynamics\nPSID = PowerSimulationsDynamics\nusing PowerSystemCaseBuilder\nusing PowerSystems\nusing PowerFlows\nconst PSY = PowerSystems\nusing Plots\ngr()\n\n# Disable Logging to avoid excessive information\nusing Logging\nLogging.disable_logging(Logging.Info); \nLogging.disable_logging(Logging.Warn); ","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"note: Note\nPowerSystemCaseBuilder.jl is a helper library that makes it easier to reproduce examples in the documentation and tutorials. Normally you would pass your local files to create the system data instead of calling the function build_system. For more details visit PowerSystemCaseBuilder Documentation","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"PowerSystems (abbreviated with PSY) is used to properly define the data structure and establish an equilibrium point initial condition with a power flow routine using PowerFlows.","category":"page"},{"location":"tutorials/tutorial_continuation_pf/#Load-the-system","page":"Small-Signal Analysis","title":"Load the system","text":"","category":"section"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"We load the system using PowerSystemCaseBuilder.jl. This system only have a generator without dynamic data on which we can use PowerFlows to generate a P-V (or nose) curve.","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"sys_static = build_system(PSIDSystems, \"2 Bus Load Tutorial\")","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"Note that this system contains an Exponential Load, but the parameters are set up to zero, so it behaves a Constant Power Load:","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"first(get_components(PSY.ExponentialLoad, sys_static))","category":"page"},{"location":"tutorials/tutorial_continuation_pf/#Create-a-P-V-curve","page":"Small-Signal Analysis","title":"Create a P-V curve","text":"","category":"section"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"The next step is to run multiple power flows and store the voltage at the load and the active power. For this example we will set up the power factor to be unitary (i.e. no reactive power at the load). ","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"# Create a Power Range to change the power load active power\nP_range = 0.01:0.01:4.6;\n# Choose the power factor\nload_pf = 1.0;","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"Then create vectors to store the results","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"# PV Curve Results\nP_load_p = Vector{Float64}();\nV_load_p = Vector{Float64}();","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"Then, we run multiple power flows in a for loop by changing the active power of the load:","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"for p in P_range\n # Change the active power and reactive power of the load\n power = p * 1.0\n load = get_component(PSY.ExponentialLoad, sys_static, \"load1021\")\n set_active_power!(load, power)\n q_power = power * tan(acos(load_pf))\n set_reactive_power!(load, q_power)\n # Run Power Flow\n status = solve_ac_powerflow!(sys_static)\n if !status\n # Finish the loop if the power flow fails\n print(\"Power Flow failed at p = $(power)\")\n break\n end\n # Obtain the bus voltage information\n bus = get_component(Bus, sys_static, \"BUS 2\")\n Vm = get_magnitude(bus)\n # Store values in the vectors\n push!(V_load_p, Vm)\n push!(P_load_p, power)\nend","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"The plot can be visualized with:","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"plot(P_load_p,\n V_load_p,\n label = \"PV Curve\",\n xlabel = \"Load Power [pu]\",\n ylabel = \"Load Bus Voltage [pu]\",\n color = :black\n)","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"(Image: plot)","category":"page"},{"location":"tutorials/tutorial_continuation_pf/#Run-Small-Signal-Analysis-besides-the-Continuation-Power-Flow","page":"Small-Signal Analysis","title":"Run Small-Signal Analysis besides the Continuation Power Flow","text":"","category":"section"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"To run a small-signal analysis we require a dynamic model of the machine. We can use PowerSystemCaseBuilder to the load the same system, but with a dynamic model for the generator, including a GENROU + SEXS exciter + TGOV1 governor.","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"sys = build_system(PSIDSystems, \"2 Bus Load Tutorial GENROU\")","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"Here are the components of the generator:","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"first(get_components(DynamicGenerator, sys))","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"Besides the results of the P-V curve, we need to store if the system is small-signal stable or not by looking if there is a positive real part eigenvalue.","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"# Vectors to store stability using a boolean (true for stable).\nstable_vec = Vector{Bool}();\nstatus_vec = Vector{Bool}();\n\n# PV Curve Results\nP_load_p = Vector{Float64}();\nV_load_p = Vector{Float64}();","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"We then run the main for loop by updating the load active power, but in addition we create a PowerSimulationsDynamics simulation on which we can run a small-signal analysis to check stability.","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"for p in P_range\n # Change the active power and reactive power of the load\n power = p * 1.0\n load = get_component(PSY.ExponentialLoad, sys_static, \"load1021\")\n set_active_power!(load, power)\n q_power = power * tan(acos(load_pf))\n set_reactive_power!(load, q_power)\n # Run Power Flow\n status = solve_ac_powerflow!(sys_static)\n if !status\n # Finish the loop if the power flow fails\n print(\"Power Flow failed at p = $(power)\")\n break\n end\n # Obtain the bus voltage information\n bus = get_component(Bus, sys_static, \"BUS 2\")\n Vm = get_magnitude(bus)\n # Store values in the vectors\n push!(V_load_p, Vm)\n push!(P_load_p, power)\n\n # Update Load Power in the GENROU system\n load = get_component(PSY.ExponentialLoad, sys, \"load1021\")\n set_active_power!(load, power)\n q_power = power * tan(acos(load_pf))\n set_reactive_power!(load, q_power)\n # Construct Simulation\n sim = Simulation(ResidualModel, sys, mktempdir(), (0.0, 1.0))\n if sim.status == PSID.BUILT\n # Check small-signal stability\n sm = small_signal_analysis(sim).stable\n # Push results of small-signal stability\n push!(stable_vec, sm)\n # Push results if the simulation was able to be constructed\n push!(status_vec, true)\n else\n # Push results if the simulation was not able to be constructed\n push!(status_vec, false)\n end\nend","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"The following plot showcases the P-V curve, while also showcasing (in red) the regions on which the system is small-signal stable.","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"\n# Find where is stable and unstable\ndict_true_ixs_p = Vector();\ndict_false_ixs_p = Vector();\ndict_true_ixs_p = findall(x->x, stable_vec);\ndict_false_ixs_p = findall(x->!x, stable_vec);\n\n# Create plot\ntrue_ixs = dict_true_ixs_p;\nplot(P_load_p, V_load_p, color = :blue, label = \"PV Curve\", xlabel = \"Load Power [pu]\", ylabel = \"Load Bus Voltage [pu]\")\nplot!(Plots.scatter!(P_load_p[true_ixs] , V_load_p[true_ixs], markerstrokewidth= 0, label = \"GENROU SSA\"))","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"(Image: plot)","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"This results is consistent with most of the literature for dynamic generator models supplying constant power loads, on which by increasing the active power of the load, produce critical eigenvalues which cross the jomega axis at some point. This is called a Hopf Bifurcation, in this case a subcritical one since the limit cycles are unstable.","category":"page"},{"location":"reference_frames/#Reference-Frames","page":"Reference Frames","title":"Reference Frames","text":"","category":"section"},{"location":"reference_frames/","page":"Reference Frames","title":"Reference Frames","text":"Each dynamic device is defined in its own dq synchronous reference frame (SRF). It is important to note that there are several conventions to do reference frame transformations.","category":"page"},{"location":"reference_frames/#Synchronous-Machines","page":"Reference Frames","title":"Synchronous Machines","text":"","category":"section"},{"location":"reference_frames/","page":"Reference Frames","title":"Reference Frames","text":"The grid is modeled in its own real-imaginary (RI) reference frame. With such, this follows the standard convention that for a voltage angle theta = 0, there is no imaginary part and hence v_h = v_r + j0. Traditionally, the reference frame dq with rotor angle delta for synchronous machines connected to a bus v_hangle theta = v_r + jv_i follows the following convention for transformation of per-unit RMS phasors:","category":"page"},{"location":"reference_frames/","page":"Reference Frames","title":"Reference Frames","text":"beginalign\nv_d + jv_q = (v_r + jv_i) e^-j(delta- pi2) tag1a \nv_d = v_h sin(delta - theta) tag1b \nv_q = v_h cos(delta - theta) tag1c \nleft beginarrayc v_d v_q endarray right = left beginarraycc sin(delta) -cos(delta) cos(delta) sin(delta) endarray right left beginarrayc v_r v_i endarray right tag1d\nendalign","category":"page"},{"location":"reference_frames/","page":"Reference Frames","title":"Reference Frames","text":"Note that hence in a bus of 10angle 0, a rotor angle of delta = 0 implies that v_q = 10 and v_d = 00. This transformation is the one that can be found in most books of Power Systems, such as Kundur, Sauer Pai and in Milano too, and is the convention used in the software to model dynamic models of synchronous machines in their own reference frame.","category":"page"},{"location":"reference_frames/#Inverters","page":"Reference Frames","title":"Inverters","text":"","category":"section"},{"location":"reference_frames/","page":"Reference Frames","title":"Reference Frames","text":"The previously convention is not the standard one used for modeling inverters. Most of inverter and phase-lock loop (PLL) models follow the next convention:","category":"page"},{"location":"reference_frames/","page":"Reference Frames","title":"Reference Frames","text":"beginalign\nv_d + jv_q = (v_r + jv_i) e^-j delta tag2a \nv_d = v_h cos(delta - theta) tag2b \nv_q = -v_h sin(delta - theta) tag2c\nendalign","category":"page"},{"location":"reference_frames/","page":"Reference Frames","title":"Reference Frames","text":"That, contrary to the previous case, when delta = theta = 0 implies that v_d = 10 and v_q = 00. This yields the typical PLL conditions that steer v_q to 0 when delta locks in theta, or when both SRF lock between each other.","category":"page"},{"location":"reference_frames/#Transformation-used","page":"Reference Frames","title":"Transformation used","text":"","category":"section"},{"location":"reference_frames/","page":"Reference Frames","title":"Reference Frames","text":"Given the predominancy of both convention in current work, the software uses both conventions depending on the device modeled. For synchronous machines we used the standard convention (1a)-(1d), while for inverter models we use the predominant convention used nowadays in such models, i.e. (2a)-(2c).","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/#Inverter-Modeling-simulation","page":"Inverter Modeling","title":"Inverter Modeling simulation","text":"","category":"section"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"Originally Contributed by: José Daniel Lara","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/#Introduction","page":"Inverter Modeling","title":"Introduction","text":"","category":"section"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"This tutorial will introduce the modeling of an inverter with Virtual Inertia in a multi-machine model of the system. We will load the data directly from PSS/e dynamic files.","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"The tutorial uses a modified 14-bus system on which all the synchronous machines have been substituted by generators with ESAC1A AVR's and no Turbine Governors.","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"In the first portion of the tutorial we will simulate the system with the original data and cause a line trip between Buses 2 and 4. In the second part of the simulation, we will switch generator 6 with a battery using an inverter and perform the same fault.","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/#Load-the-packages","page":"Inverter Modeling","title":"Load the packages","text":"","category":"section"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"using PowerSimulationsDynamics\nusing PowerSystemCaseBuilder\nusing PowerSystems\nconst PSY = PowerSystems\nusing PowerFlows\nusing Logging\nusing Sundials\nusing Plots","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"note: Note\nPowerSystemCaseBuilder.jl is a helper library that makes it easier to reproduce examples in the documentation and tutorials. Normally you would pass your local files to create the system data instead of calling the function build_system. For more details visit PowerSystemCaseBuilder Documentation","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"Create the system using PowerSystemCaseBuilder.jl:","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"sys = build_system(PSIDSystems, \"14 Bus Base Case\")","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"PowerSystemCaseBuilder.jl is a helper library that makes it easier to reproduce examples in the documentation and tutorials. Normally you would pass your local files to create the system data.","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"Define Simulation Problem with a 20 second simulation period and the branch trip at t = 1.0:","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"sim = Simulation(\n ResidualModel, #Type of model used\n sys, #system\n mktempdir(), #path for the simulation output\n (0.0, 20.0), #time span\n BranchTrip(1.0, Line, \"BUS 02-BUS 04-i_1\");\n console_level = Logging.Info,\n)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"Now that the system is initialized, we can verify the system states for potential issues.","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"show_states_initial_value(sim)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"We execute the simulation with an additional tolerance for the solver set at 1e-8:","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"execute!(sim, IDA(); abstol = 1e-8)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"Using PowerSimulationsDynamics tools for exploring the results, we can plot all the voltage results for the buses:","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"result = read_results(sim)\np = plot();\nfor b in get_components(ACBus, sys)\n voltage_series = get_voltage_magnitude_series(result, get_number(b))\n plot!(\n p,\n voltage_series;\n xlabel = \"Time\",\n ylabel = \"Voltage Magnitude [pu]\",\n label = \"Bus - $(get_name(b))\",\n );\nend","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"(Image: plot)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"We can also explore the frequency of the different generators","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"p2 = plot();\nfor g in get_components(ThermalStandard, sys)\n state_series = get_state_series(result, (get_name(g), :ω))\n plot!(\n p2,\n state_series;\n xlabel = \"Time\",\n ylabel = \"Speed [pu]\",\n label = \"$(get_name(g)) - ω\",\n );\nend","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"(Image: plot)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"It is also possible to explore the small signal stability of this system we created.","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"res = small_signal_analysis(sim)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/#The-eigenvalues-can-be-explored","page":"Inverter Modeling","title":"The eigenvalues can be explored","text":"","category":"section"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"res.eigenvalues","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/#Modifying-the-system-and-adding-storage","page":"Inverter Modeling","title":"Modifying the system and adding storage","text":"","category":"section"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"Reload the system for this example:","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"sys = build_system(PSIDSystems, \"14 Bus Base Case\")\n\n# We want to remove the generator 6 and the dynamic component attached to it.\nthermal_gen = get_component(ThermalStandard, sys, \"generator-6-1\")\nremove_component!(sys, get_dynamic_injector(thermal_gen))\nremove_component!(sys, thermal_gen)\n\n# We can now define our storage device and add it to the system\nstorage = GenericBattery(\n name = \"Battery\",\n bus = get_component(Bus, sys, \"BUS 06\"),\n available = true,\n prime_mover = PrimeMovers.BA,\n active_power = 0.6,\n reactive_power = 0.16,\n rating = 1.1,\n base_power = 25.0,\n initial_energy = 50.0,\n state_of_charge_limits = (min = 5.0, max = 100.0),\n input_active_power_limits = (min = 0.0, max = 1.0),\n output_active_power_limits = (min = 0.0, max = 1.0),\n reactive_power_limits = (min = -1.0, max = 1.0),\n efficiency = (in = 0.80, out = 0.90),\n)\n\nadd_component!(sys, storage)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"A good sanity check it running a power flow on the system to make sure all the components are properly scaled and that the system is properly balanced. We can use PowerSystems to perform this check. We can get the results back and perform a sanity check.","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"res = solve_powerflow(ACPowerFlow(), sys)\nres[\"bus_results\"]","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"After verifying that the system works, we can define our inverter dynamics and add it to the battery that has already been stored in the system.","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"inverter = DynamicInverter(\n name = get_name(storage),\n ω_ref = 1.0, # ω_ref,\n converter = AverageConverter(rated_voltage = 138.0, rated_current = 100.0),\n outer_control = OuterControl(\n VirtualInertia(Ta = 2.0, kd = 400.0, kω = 20.0),\n ReactivePowerDroop(kq = 0.2, ωf = 1000.0),\n ),\n inner_control = VoltageModeControl(\n kpv = 0.59, #Voltage controller proportional gain\n kiv = 736.0, #Voltage controller integral gain\n kffv = 0.0, #Binary variable enabling the voltage feed-forward in output of current controllers\n rv = 0.0, #Virtual resistance in pu\n lv = 0.2, #Virtual inductance in pu\n kpc = 1.27, #Current controller proportional gain\n kic = 14.3, #Current controller integral gain\n kffi = 0.0, #Binary variable enabling the current feed-forward in output of current controllers\n ωad = 50.0, #Active damping low pass filter cut-off frequency\n kad = 0.2,\n ),\n dc_source = FixedDCSource(voltage = 600.0),\n freq_estimator = KauraPLL(\n ω_lp = 500.0, #Cut-off frequency for LowPass filter of PLL filter.\n kp_pll = 0.084, #PLL proportional gain\n ki_pll = 4.69, #PLL integral gain\n ),\n filter = LCLFilter(lf = 0.08, rf = 0.003, cf = 0.074, lg = 0.2, rg = 0.01),\n)\nadd_component!(sys, inverter, storage)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"These are the current system components:","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"sys","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"Define Simulation problem using the same parameters:","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"sim = Simulation(\n ResidualModel, #Type of model used\n sys, #system\n mktempdir(), #path for the simulation output\n (0.0, 20.0), #time span\n BranchTrip(1.0, Line, \"BUS 02-BUS 04-i_1\");\n console_level = Logging.Info,\n)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"We can verify the small signal stability of the system before running the simulation:","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"res = small_signal_analysis(sim)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"Exploring the eigenvalues:","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"res.eigenvalues","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"We execute the simulation","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"execute!(sim, IDA(); abstol = 1e-8)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"Using PowerSimulationsDynamics tools for exploring the results, we can plot all the voltage results for the buses","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"result = read_results(sim)\np = plot();\nfor b in get_components(ACBus, sys)\n voltage_series = get_voltage_magnitude_series(result, get_number(b))\n plot!(\n p,\n voltage_series;\n xlabel = \"Time\",\n ylabel = \"Voltage Magnitude [pu]\",\n label = \"Bus - $(get_name(b))\",\n );\nend","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"(Image: plot)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"We can also explore the frequency of the different static generators and storage","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"p2 = plot();\nfor g in get_components(ThermalStandard, sys)\n state_series = get_state_series(result, (get_name(g), :ω))\n plot!(\n p2,\n state_series;\n xlabel = \"Time\",\n ylabel = \"Speed [pu]\",\n label = \"$(get_name(g)) - ω\",\n );\nend\nstate_series = get_state_series(result, (\"Battery\", :ω_oc))\nplot!(p2, state_series; xlabel = \"Time\", ylabel = \"Speed [pu]\", label = \"Battery - ω\");","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"(Image: plot)","category":"page"},{"location":"time_delays/#Delays","page":"Time Delays","title":"Delays","text":"","category":"section"},{"location":"time_delays/","page":"Time Delays","title":"Time Delays","text":"PowerSimulationsDynamics supports models with constant delays in a mass matrix formulation:","category":"page"},{"location":"time_delays/","page":"Time Delays","title":"Time Delays","text":"beginalign\nMfracdx(t)dt = f(x(t) x(t-tau_1) x(t-tau_N)) \nendalign","category":"page"},{"location":"time_delays/","page":"Time Delays","title":"Time Delays","text":"For more information on solving such models, refer to the documentation for DelayDiffEq.jl package.","category":"page"},{"location":"time_delays/","page":"Time Delays","title":"Time Delays","text":"The following models include time delays:","category":"page"},{"location":"time_delays/","page":"Time Delays","title":"Time Delays","text":"DEGOV","category":"page"},{"location":"time_delays/","page":"Time Delays","title":"Time Delays","text":"There is currently limited support for including models with time delays. The following limitations apply:","category":"page"},{"location":"time_delays/","page":"Time Delays","title":"Time Delays","text":"Only constant delays are supported (state dependent delays are not).\nSystem models with delays must use MassMatrixModel formulation (ResidualModel is not currently compatible).\nSystem models with delays are not compatible with small signal analysis tools.\nThe system formulation with delays is not compatible with automatic differentiation for calculating the gradient with respect to time. The setting autodiff=false should be set when passing the solver (e.g. MethodofSteps(Rodas5(autodiff=false))).","category":"page"},{"location":"component_models/dc_source/#DC-Source","page":"DC Sources","title":"DC Source","text":"","category":"section"},{"location":"component_models/dc_source/","page":"DC Sources","title":"DC Sources","text":"This component can be used to model the dynamics of the DC side of the converter.","category":"page"},{"location":"component_models/dc_source/#Fixed-DC-Source-[FixedDCSource]","page":"DC Sources","title":"Fixed DC Source [FixedDCSource]","text":"","category":"section"},{"location":"component_models/dc_source/","page":"DC Sources","title":"DC Sources","text":"This is a model that set the DC voltage to a fixed value v_textdc = v_textdc^textfix.","category":"page"},{"location":"tutorials/tutorial_omib/#One-Machine-against-Infinite-Bus-(OMIB)-Simulation","page":"OMIB","title":"One Machine against Infinite Bus (OMIB) Simulation","text":"","category":"section"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"Originally Contributed by: Rodrigo Henriquez-Auba and José Daniel Lara","category":"page"},{"location":"tutorials/tutorial_omib/#Introduction","page":"OMIB","title":"Introduction","text":"","category":"section"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"This tutorial will introduce you to the functionality of PowerSimulationsDynamics for running power system dynamic simulations.","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"This tutorial presents a simulation of a two-bus system with an infinite bus (represented as a voltage source behind an impedance) at bus 1, and a classic machine on bus 2. The perturbation will be the trip of one of the two circuits (doubling its resistance and impedance) of the line that connects both buses.","category":"page"},{"location":"tutorials/tutorial_omib/#Dependencies","page":"OMIB","title":"Dependencies","text":"","category":"section"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"using PowerSimulationsDynamics\nPSID = PowerSimulationsDynamics\nusing PowerSystemCaseBuilder\nusing PowerSystems\nconst PSY = PowerSystems\nusing Sundials\nusing Plots\ngr()","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"note: Note\nPowerSystemCaseBuilder.jl is a helper library that makes it easier to reproduce examples in the documentation and tutorials. Normally you would pass your local files to create the system data instead of calling the function build_system. For more details visit PowerSystemCaseBuilder Documentation","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"PowerSystems (abbreviated with PSY) is used to properly define the data structure and establish an equilibrium point initial condition with a power flow routine, while Sundials is used to solve the problem defined in PowerSimulationsDynamics.","category":"page"},{"location":"tutorials/tutorial_omib/#Load-the-system","page":"OMIB","title":"Load the system","text":"","category":"section"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"We load the system using PowerSystemCaseBuilder.jl:","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"omib_sys = build_system(PSIDSystems, \"OMIB System\")","category":"page"},{"location":"tutorials/tutorial_omib/#Build-the-simulation-and-initialize-the-problem","page":"OMIB","title":"Build the simulation and initialize the problem","text":"","category":"section"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"The next step is to create the simulation structure. This will create the indexing of our system that will be used to formulate the differential-algebraic system of equations. To do so, it is required to specify the perturbation that will occur in the system. PowerSimulationsDynamics supports multiple types of perturbations. See Perturbations","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"Here, we will use a Branch Trip perturbation, that is modeled by modifying the specifying which line we want to trip. In this case we disconnect one of the lines that connects BUS 1 and BUS 2, named \"BUS 1-BUS 2-i_1\".","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"With this, we are ready to create our simulation structure:","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"time_span = (0.0, 30.0)\nperturbation_trip = BranchTrip(1.0, Line, \"BUS 1-BUS 2-i_1\")\nsim = PSID.Simulation(\n ResidualModel, # Type of formulation\n omib_sys, # System\n mktempdir(), # Output directory\n time_span,\n perturbation_trip)","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"This will automatically initialize the system by running a power flow and update V_ref, P_ref and hence eq_p (the internal voltage) to match the solution of the power flow. It will also initialize the states in the equilibrium, which can be printed with:","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"show_states_initial_value(sim)","category":"page"},{"location":"tutorials/tutorial_omib/#Run-the-Simulation","page":"OMIB","title":"Run the Simulation","text":"","category":"section"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"Finally, to run the simulation we simply use:","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"execute!(\n sim, #simulation structure\n IDA(), #Sundials DAE Solver\n dtmax = 0.02, #Arguments: Maximum timestep allowed\n);","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"In some cases, the dynamic time step used for the simulation may fail. In such case, the keyword argument dtmax can be used to limit the maximum time step allowed for the simulation.","category":"page"},{"location":"tutorials/tutorial_omib/#Exploring-the-solution","page":"OMIB","title":"Exploring the solution","text":"","category":"section"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"First, we need to load the simulation results into memory:","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"results = read_results(sim)","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"PowerSimulationsDynamics has two functions to obtain different states of the solution:","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"get_state_series(results, (\"generator-102-1\", :δ)): can be used to obtain the solution as a tuple of time and the required state. In this case, we are obtaining the rotor angle :δ of the generator named \"generator-102-1\"`.","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"angle = get_state_series(results, (\"generator-102-1\", :δ));\nplot(angle, xlabel = \"time\", ylabel = \"rotor angle [rad]\", label = \"rotor angle\")","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"(Image: plot)","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"get_voltage_magnitude_series(results, 102): can be used to obtain the voltage magnitude as a tuple of time and voltage. In this case, we are obtaining the voltage magnitude at bus 102 (where the generator is located).","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"volt = get_voltage_magnitude_series(results, 102);\nplot(volt, xlabel = \"time\", ylabel = \"Voltage [pu]\", label = \"V_2\")","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"(Image: plot)","category":"page"},{"location":"tutorials/tutorial_omib/#Optional:-Small-Signal-Analysis","page":"OMIB","title":"Optional: Small Signal Analysis","text":"","category":"section"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"PowerSimulationsDynamics uses automatic differentiation to compute the reduced Jacobian of the system for the differential states. This can be used to analyze the local stability of the linearized system. We need to re-initialize our simulation:","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"sim2 = Simulation(ResidualModel, omib_sys, mktempdir(), time_span)\nsmall_sig = small_signal_analysis(sim2)","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"The small_sig result can report the reduced jacobian for delta and omega,","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"small_sig.reduced_jacobian","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"and can also be used to report the eigenvalues of the reduced linearized system:","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"small_sig.eigenvalues","category":"page"},{"location":"api/internal/#Internal","page":"Internal API Reference","title":"Internal","text":"","category":"section"},{"location":"api/internal/","page":"Internal API Reference","title":"Internal API Reference","text":"CurrentModule = PowerSimulationsDynamics\nDocTestSetup = quote\n using PowerSimulationsDynamics\nend","category":"page"},{"location":"api/internal/","page":"Internal API Reference","title":"Internal API Reference","text":"Modules = [PowerSimulationsDynamics]\nPublic = false\nPrivate = true","category":"page"},{"location":"api/internal/#PowerSimulationsDynamics.BUILD_STATUS","page":"Internal API Reference","title":"PowerSimulationsDynamics.BUILD_STATUS","text":"Defines the status of the simulation object\n\n\n\n\n\n","category":"type"},{"location":"api/internal/#PowerSimulationsDynamics.BranchWrapper","page":"Internal API Reference","title":"PowerSimulationsDynamics.BranchWrapper","text":"Wraps DynamicBranch devices from PowerSystems to handle changes in controls and connection status, and allocate the required indexes of the state space.\n\n\n\n\n\n","category":"type"},{"location":"api/internal/#PowerSimulationsDynamics.DynamicWrapper","page":"Internal API Reference","title":"PowerSimulationsDynamics.DynamicWrapper","text":"Wraps DynamicInjection devices from PowerSystems to handle changes in controls and connection status, and allocate the required indexes of the state space.\n\n\n\n\n\n","category":"type"},{"location":"api/internal/#PowerSimulationsDynamics.SimulationInputs-Tuple{Type{MassMatrixModel}, System, Union{ConstantFrequency, ReferenceBus}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.SimulationInputs","text":"SimulationInputs build function for MassMatrixModels\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.SimulationInputs-Tuple{Type{ResidualModel}, System, Union{ConstantFrequency, ReferenceBus}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.SimulationInputs","text":"SimulationInputs build function for ResidualModels\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.generator_inner_vars","page":"Internal API Reference","title":"PowerSimulationsDynamics.generator_inner_vars","text":"Generator Inner Vars:\n\nτe_var :: Electric torque\nτm_var :: Mechanical torque\nVf_var :: Field voltage\nV_pss_var :: Additional PSS voltage\nVR_gen_var :: Real part of the terminal voltage\nVI_gen_var :: Imaginary part of the terminal voltage\nψd_var :: Stator Flux (if defined) in the d-axis\nψq_var :: Stator Flux (if defined) in the q-axis\n\n\n\n\n\n","category":"type"},{"location":"api/internal/#PowerSimulationsDynamics.inverter_inner_vars","page":"Internal API Reference","title":"PowerSimulationsDynamics.inverter_inner_vars","text":"Inverter Inner Vars:\n\nmd_var :: Modulation signal on the d-component\nmq_var :: Modulation signal on the q-component\nVdc_var :: DC voltage supplied by the DC source\nVr_filter_var :: Voltage seen in the capacitor of the filter in the R-component\nVi_filter_var :: Voltage seen in the capacitor of the filter in the I-component\nθ_freq_estimator_var :: Angle estimated by the frequency estimator.\nω_freq_estimator_var :: Frequency estimated by the frequency estimator.\nV_oc_var :: Control voltage reference in the d-axis supplied from the outer loop control to the inner loop (for Voltage Mode Control)\nId_oc_var :: Control current reference in the d-axis supplied from the outer loop control to the inner loop (for Current Mode Control)\nIq_oc_var :: Control current reference in the q-axis supplied from the outer loop control to the inner loop (for Current Mode Control)\nId_ic_var :: Control current reference in the d-axis supplied from the inner loop control to the converter (for Generic Models)\nIq_ic_var :: Control current reference in the q-axis supplied from the inner loop control to the converter (for Generic Models)\nIr_cnv_var :: Control current reference in the R-axis supplied from the converter to the filter (for Generic Models)\nIi_cnv_var :: Control current reference in the I-axis supplied from the converter to the filter (for Generic Models)\nω_oc_var :: Control frequency supplied from the outer loop control the inner loop\nθ_oc_var :: Variation of the angle (PLL or VSM) of the inverter\nVr_inv_var :: Real terminal voltage on the inverter\nVi_inv_var :: Imaginary terminal voltage on the inverter\nVr_cnv_var :: Voltage supplied from the converter in the R-component\nVi_cnv_var :: Voltage supplied from the converter in the I-component\nP_ES_var :: Power supplied from the Energy Source side\n\n\n\n\n\n","category":"type"},{"location":"api/internal/#PowerSimulationsDynamics._field_current-Tuple{SalientPoleExponential, String, Vector{Float64}, Vector{Float64}, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._field_current","text":"Function to obtain the field current time series of a Dynamic Generator with machine type GENSAE.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._field_current-Tuple{SalientPoleQuadratic, String, Vector{Float64}, Vector{Float64}, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._field_current","text":"Function to obtain the field current time series of a Dynamic Generator with machine type GENSAL.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._field_current-Union{Tuple{M}, Tuple{M, String, Vector{Float64}, Vector{Float64}, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}} where M<:Machine","page":"Internal API Reference","title":"PowerSimulationsDynamics._field_current","text":"Function to obtain the field current time series of a Dynamic Generator. It is dispatched via the machine type. By default, machine does not have support for field current\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._field_current-Union{Tuple{M}, Tuple{M, String, Vector{Float64}, Vector{Float64}, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}} where M<:Union{RoundRotorExponential, RoundRotorQuadratic}","page":"Internal API Reference","title":"PowerSimulationsDynamics._field_current","text":"Function to obtain the field current time series of a Dynamic Generator with machine type GENROU/GENROE.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._field_voltage-Tuple{AVRFixed, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._field_voltage","text":"Function to obtain the field voltage time series of a Dynamic Generator with avr AVRFixed.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._field_voltage-Tuple{ESST1A, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._field_voltage","text":"Function to obtain the field voltage time series of a Dynamic Generator with avr ESST1A.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._field_voltage-Tuple{SCRX, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._field_voltage","text":"Function to obtain the field voltage time series of a Dynamic Generator with avr SCRX.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._field_voltage-Tuple{Union{ESAC1A, EXAC1}, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._field_voltage","text":"Function to obtain the field voltage time series of a Dynamic Generator with avr ESAC1A and EXAC1.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._field_voltage-Union{Tuple{A}, Tuple{A, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}} where A<:AVR","page":"Internal API Reference","title":"PowerSimulationsDynamics._field_voltage","text":"Function to obtain the field voltage time series of a Dynamic Generator with avrs that have the field voltage as a state. By default it is assumed that the models have that state.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._frequency-Union{Tuple{G}, Tuple{F}, Tuple{OuterControl{ActivePowerDroop, ReactivePowerDroop}, F, String, SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where {F<:FrequencyEstimator, G<:DynamicInverter}","page":"Internal API Reference","title":"PowerSimulationsDynamics._frequency","text":"Function to obtain the frequency time series of a droop grid forming inverter out of the DAE Solution. It is dispatched via the OuterControl type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._frequency-Union{Tuple{G}, Tuple{F}, Tuple{OuterControl{ActiveVirtualOscillator, ReactiveVirtualOscillator}, F, String, SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where {F<:FrequencyEstimator, G<:DynamicInverter}","page":"Internal API Reference","title":"PowerSimulationsDynamics._frequency","text":"Function to obtain the frequency time series of a VOC grid forming inverter out of the DAE Solution. It is dispatched via the OuterControl type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._frequency-Union{Tuple{G}, Tuple{F}, Tuple{OuterControl{VirtualInertia, ReactivePowerDroop}, F, String, SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where {F<:FrequencyEstimator, G<:DynamicInverter}","page":"Internal API Reference","title":"PowerSimulationsDynamics._frequency","text":"Function to obtain the frequency time series of a virtual inertia grid forming inverter out of the DAE Solution. It is dispatched via the OuterControl type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._frequency-Union{Tuple{G}, Tuple{OuterControl{ActivePowerPI, ReactivePowerPI}, KauraPLL, String, SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicInverter","page":"Internal API Reference","title":"PowerSimulationsDynamics._frequency","text":"Function to obtain the frequency time series of a grid-following inverter with KauraPLL out of the DAE Solution. It is dispatched via the OuterControl and FrequencyEstimator type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._frequency-Union{Tuple{G}, Tuple{OuterControl{ActivePowerPI, ReactivePowerPI}, ReducedOrderPLL, String, SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicInverter","page":"Internal API Reference","title":"PowerSimulationsDynamics._frequency","text":"Function to obtain the frequency time series of a grid-following inverter with ReducedOrderPLL out of the DAE Solution. It is dispatched via the OuterControl and FrequencyEstimator type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._machine_current-Tuple{BaseMachine, String, Vector{Float64}, Vector{Float64}, Float64, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._machine_current","text":"Function to obtain the output current time series of a Classic Machine model out of the DAE Solution. It is dispatched via the machine type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._machine_current-Tuple{OneDOneQMachine, String, Vector{Float64}, Vector{Float64}, Float64, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._machine_current","text":"Function to obtain the output current time series of a One-D-One-Q model out of the DAE Solution. It is dispatched via the machine type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._machine_current-Tuple{SauerPaiMachine, String, Vector{Float64}, Vector{Float64}, Float64, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._machine_current","text":"Function to obtain the output current time series of a SauerPaiMachine model out of the DAE Solution. It is dispatched via the machine type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._machine_current-Tuple{Union{AndersonFouadMachine, MarconatoMachine}, String, Vector{Float64}, Vector{Float64}, Float64, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._machine_current","text":"Function to obtain the output current time series of a Marconato or AndersonFouad model out of the DAE Solution. It is dispatched via the machine type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._machine_current-Tuple{Union{RoundRotorExponential, RoundRotorQuadratic}, String, Vector{Float64}, Vector{Float64}, Float64, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._machine_current","text":"Function to obtain the output current time series of a GENROU/GENROE model out of the DAE Solution. It is dispatched via the machine type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._machine_current-Tuple{Union{SalientPoleExponential, SalientPoleQuadratic}, String, Vector{Float64}, Vector{Float64}, Float64, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._machine_current","text":"Function to obtain the output current time series of a GENSAL/GENSAE model out of the DAE Solution. It is dispatched via the machine type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._machine_current-Tuple{Union{SimpleAFMachine, SimpleMarconatoMachine}, String, Vector{Float64}, Vector{Float64}, Float64, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._machine_current","text":"Function to obtain the output current time series of a SimpleMarconato or SimpleAndersonFouad model out of the DAE Solution. It is dispatched via the machine type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._make_reduced_jacobian_index-Tuple{Any, Any}","page":"Internal API Reference","title":"PowerSimulationsDynamics._make_reduced_jacobian_index","text":"Finds the location of the differential states in the reduced Jacobian\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._mechanical_torque-Tuple{DEGOV, String, SimulationResults, Union{Nothing, Float64}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._mechanical_torque","text":"Function to obtain the mechanical torque time series of a Dynamic Generator with DEGOV Turbine Governor.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._mechanical_torque-Tuple{GasTG, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._mechanical_torque","text":"Function to obtain the mechanical torque time series of a Dynamic Generator with GasTG (GAST) Turbine Governor.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._mechanical_torque-Tuple{HydroTurbineGov, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._mechanical_torque","text":"Function to obtain the mechanical torque time series of a Dynamic Generator with HydroTurbineGov (HYGOV) Turbine Governor.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._mechanical_torque-Tuple{SteamTurbineGov1, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._mechanical_torque","text":"Function to obtain the mechanical torque time series of a Dynamic Generator with SteamTurbineGov1 (TGOV1) Turbine Governor.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._mechanical_torque-Tuple{TGFixed, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._mechanical_torque","text":"Function to obtain the mechanical torque time series of a Dynamic Generator with TGFixed Turbine Governor.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._mechanical_torque-Tuple{TGTypeI, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._mechanical_torque","text":"Function to obtain the mechanical torque time series of a Dynamic Generator with TGTypeI Turbine Governor.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._mechanical_torque-Tuple{TGTypeII, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._mechanical_torque","text":"Function to obtain the mechanical torque time series of a Dynamic Generator with TGTypeII Turbine Governor.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._output_current-Union{Tuple{G}, Tuple{C}, Tuple{LCLFilter, C, String, Vector{Float64}, Vector{Float64}, Float64, SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where {C<:Converter, G<:DynamicInverter}","page":"Internal API Reference","title":"PowerSimulationsDynamics._output_current","text":"Function to obtain the output current time series of a LCL Filter model out of the DAE Solution. It is dispatched via the Filter type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._output_current-Union{Tuple{G}, Tuple{RLFilter, RenewableEnergyConverterTypeA, String, Vector{Float64}, Vector{Float64}, Float64, SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicInverter","page":"Internal API Reference","title":"PowerSimulationsDynamics._output_current","text":"Function to obtain the output current time series of a REGCA converter model out of the DAE Solution. It is dispatched via the Converter type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._post_proc_state_series-Tuple{Any, Int64, Nothing}","page":"Internal API Reference","title":"PowerSimulationsDynamics._post_proc_state_series","text":"Internal function to obtain as a Vector of Float64 of a specific state. It receives the solution and the global index for a state.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._pss_output-Tuple{IEEEST, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._pss_output","text":"Function to obtain the pss output time series of a Dynamic Generator with pss IEEEST.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._pss_output-Tuple{PSSFixed, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._pss_output","text":"Function to obtain the pss output time series of a Dynamic Generator with pss PSSFixed.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_field_current-Union{Tuple{G}, Tuple{SimulationResults, G, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicGenerator","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_field_current","text":"Function to obtain the field current time series of a Dynamic Generator model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific current.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_field_current-Union{Tuple{G}, Tuple{SimulationResults, G, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicInverter","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_field_current","text":"Function to obtain the field current time series of a Dynamic Inverter model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It must return nothing since field current does not exists in inverters.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_field_voltage-Union{Tuple{G}, Tuple{SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicGenerator","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_field_voltage","text":"Function to obtain the field voltage time series of a Dynamic Generator model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific voltage.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_field_voltage-Union{Tuple{G}, Tuple{SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicInverter","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_field_voltage","text":"Function to obtain the field current time series of a Dynamic Inverter model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It must return nothing since field voltage does not exists in inverters.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_frequency-Union{Tuple{G}, Tuple{SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicGenerator","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_frequency","text":"Function to obtain the output frequency time series of a DynamicGenerator\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_mechanical_torque-Union{Tuple{G}, Tuple{SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicGenerator","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_mechanical_torque","text":"Function to obtain the mechanical torque time series of a Dynamic Generator model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific torque.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_mechanical_torque-Union{Tuple{G}, Tuple{SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicInverter","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_mechanical_torque","text":"Function to obtain the mechanical torque time series of a Dynamic Inverter model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It must return nothing since mechanical torque is not used in inverters.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Tuple{SimulationResults, AggregateDistributedGenerationA, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Function to obtain the output current time series of a AggregateDistributedGenerationA (DERA) model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Tuple{SimulationResults, ExponentialLoad, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Function to obtain the output current time series of a ExponentialLoad model. \n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Tuple{SimulationResults, PeriodicVariableSource, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Function to obtain the output current time series of a PeriodicVariableSource model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific current. computeoutputcurrent(::SimulationResults, ::PeriodicVariableSource, ::Vector{Float64}, ::Vector{Float64}, ::Nothing)\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Tuple{SimulationResults, PowerLoad, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Function to obtain the output current time series of a PowerLoad model. \n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Tuple{SimulationResults, SimplifiedSingleCageInductionMachine, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Function to obtain the output current time series of a 3th Order Induction Machine model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. \n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Tuple{SimulationResults, SingleCageInductionMachine, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Function to obtain the output current time series of a 5th Order Induction Machine model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. \n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Tuple{SimulationResults, StandardLoad, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Function to obtain the output current time series of a PowerLoad model. \n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Union{Tuple{G}, Tuple{SimulationResults, G, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicGenerator","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Function to obtain the output current time series of a Dynamic Generator model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific current.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Union{Tuple{G}, Tuple{SimulationResults, G, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicInverter","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Function to obtain the output current time series of a Dynamic Inverter model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific current.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Union{Tuple{I}, Tuple{SimulationResults, I, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}} where I<:DynamicInjection","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Default function to compute output current. Returns an error\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_pss_output-Union{Tuple{G}, Tuple{SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicGenerator","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_pss_output","text":"Function to obtain the pss output time series of a Dynamic Generator model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific output.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.configure_logging-Tuple{}","page":"Internal API Reference","title":"PowerSimulationsDynamics.configure_logging","text":"configure_logging(;\n console_level = Logging.Error,\n file_level = Logging.Info,\n filename = \"power-simulations.log\",\n)\n\nCreates console and file loggers.\n\nNote: Log messages may not be written to the file until flush() or close() is called on the returned logger.\n\nArguments\n\nconsole_level = Logging.Error: level for console messages\nfile_level = Logging.Info: level for file messages\nfilename::String = power-simulations.log: log file\n\nExample\n\nlogger = configure_logging(console_level = Logging.Info)\n@info \"log message\"\nclose(logger)\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.device!-Union{Tuple{T}, Tuple{AbstractArray{T}, AbstractArray{T}, T, T, AbstractArray{T}, AbstractArray{T}, AbstractArray{T}, AbstractArray{T}, PowerSimulationsDynamics.DynamicWrapper{ActiveConstantPowerLoad}, Any, Any}} where T<:Union{Float64, ForwardDiff.Dual}","page":"Internal API Reference","title":"PowerSimulationsDynamics.device!","text":"Model of 12-state Active Constant Power Load in Julia. Based on the paper Malicious Control of an Active Load in an Islanded Mixed-Source Microgrid by C. Roberts, U. Markovic, D. Arnold and D. Callaway.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.device!-Union{Tuple{T}, Tuple{AbstractArray{T}, AbstractArray{T}, T, T, AbstractArray{T}, AbstractArray{T}, AbstractArray{T}, AbstractArray{T}, PowerSimulationsDynamics.DynamicWrapper{CSVGN1}, Any, Any}} where T<:Union{Float64, ForwardDiff.Dual}","page":"Internal API Reference","title":"PowerSimulationsDynamics.device!","text":"Model of Static Shunt Compensator: CSVGN1.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.device!-Union{Tuple{T}, Tuple{AbstractArray{T}, AbstractArray{T}, T, T, AbstractArray{T}, AbstractArray{T}, AbstractArray{T}, AbstractArray{T}, PowerSimulationsDynamics.DynamicWrapper{SimplifiedSingleCageInductionMachine}, Any, Any}} where T<:Union{Float64, ForwardDiff.Dual}","page":"Internal API Reference","title":"PowerSimulationsDynamics.device!","text":"Model of 3-state (SimplifiedSingleCageInductionMachine) induction motor in Julia. Based on the 3rd order model derived in Prabha Kundur's Book and the equations in \"Analysis of Electric Machinery and Drive Systems\" by Paul Krause, Oleg Wasynczuk and Scott Sudhoff.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.device!-Union{Tuple{T}, Tuple{AbstractArray{T}, AbstractArray{T}, T, T, AbstractArray{T}, AbstractArray{T}, AbstractArray{T}, AbstractArray{T}, PowerSimulationsDynamics.DynamicWrapper{SingleCageInductionMachine}, Any, Any}} where T<:Union{Float64, ForwardDiff.Dual}","page":"Internal API Reference","title":"PowerSimulationsDynamics.device!","text":"Model of 5-state (SingleCageInductionMachine) induction motor in Julia. Refer to \"Analysis of Electric Machinery and Drive Systems\" by Paul Krause, Oleg Wasynczuk and Scott Sudhoff for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.initialize_mach_shaft!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{Any, StaticInjection, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{AndersonFouadMachine, S, A, TG, P}}, AbstractVector}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.initialize_mach_shaft!","text":"Initialitation of model of 6-state (Anderson-Fouad) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.initialize_mach_shaft!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{Any, StaticInjection, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{BaseMachine, S, A, TG, P}}, AbstractVector}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.initialize_mach_shaft!","text":"Initialitation of model of 0-state synchronous (classic model) machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.initialize_mach_shaft!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{Any, StaticInjection, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{MarconatoMachine, S, A, TG, P}}, AbstractVector}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.initialize_mach_shaft!","text":"Initialitation of model of 6-state (Marconato) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.initialize_mach_shaft!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{Any, StaticInjection, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{OneDOneQMachine, S, A, TG, P}}, AbstractVector}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.initialize_mach_shaft!","text":"Initialitation of model of 2-state (One d- and One q-) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.initialize_mach_shaft!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{Any, StaticInjection, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{SauerPaiMachine, S, A, TG, P}}, AbstractVector}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.initialize_mach_shaft!","text":"Initialitation of model of 6-state (SauerPai) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.initialize_mach_shaft!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{Any, StaticInjection, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{SimpleAFMachine, S, A, TG, P}}, AbstractVector}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.initialize_mach_shaft!","text":"Initialitation of model of 4-state (Simple Anderson-Fouad) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.initialize_mach_shaft!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{Any, StaticInjection, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{SimpleMarconatoMachine, S, A, TG, P}}, AbstractVector}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.initialize_mach_shaft!","text":"Initialitation of model of 4-state (Simple Marconato) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.low_pass_modified_mass_matrix-Union{Tuple{Z}, Tuple{W}, Tuple{V}, Tuple{Z, V, Float64, W, Float64}} where {V<:Union{Float64, ForwardDiff.Dual}, W<:Union{Float64, ForwardDiff.Dual}, Z<:Union{Float64, ForwardDiff.Dual}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.low_pass_modified_mass_matrix","text":"Low Pass Filter Modified ┌─────────────┐ │ K │ u -> │ ────────────│ -> y │ K_den + sT │ └─────────────┘\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.mass_matrix_entries-Tuple{DynamicInjection}","page":"Internal API Reference","title":"PowerSimulationsDynamics.mass_matrix_entries","text":"Default implementation of mass matrix entries. Keeps the default values in the identity matrix\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.mdl_machine_ode!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{AndersonFouadMachine, S, A, TG, P}}, Any, Any}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.mdl_machine_ode!","text":"Model of 6-state (AndersonFouadMachine) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.mdl_machine_ode!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{BaseMachine, S, A, TG, P}}, Any, Any}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.mdl_machine_ode!","text":"Model of 0-state synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.mdl_machine_ode!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{MarconatoMachine, S, A, TG, P}}, Any, Any}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.mdl_machine_ode!","text":"Model of 6-state (MarconatoMachine) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.mdl_machine_ode!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{OneDOneQMachine, S, A, TG, P}}, Any, Any}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.mdl_machine_ode!","text":"Model of 2-state (One d- and One q-) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.mdl_machine_ode!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{SauerPaiMachine, S, A, TG, P}}, Any, Any}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.mdl_machine_ode!","text":"Model of 6-state (SauerPaiMachine) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.mdl_machine_ode!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{SimpleAFMachine, S, A, TG, P}}, Any, Any}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.mdl_machine_ode!","text":"Model of 4-state (SimpleAFMachine) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.mdl_machine_ode!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{SimpleMarconatoMachine, S, A, TG, P}}, Any, Any}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.mdl_machine_ode!","text":"Model of 4-state (SimpleMarconatoMachine) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.mdl_zip_load!-Union{Tuple{T}, Tuple{T, T, AbstractArray{T}, AbstractArray{T}, PowerSimulationsDynamics.StaticLoadWrapper}} where T<:Union{Float64, ForwardDiff.Dual}","page":"Internal API Reference","title":"PowerSimulationsDynamics.mdl_zip_load!","text":"Model for ZIP Load model given by:\n\nPzip = Ppower + Pcurrent * (V / V0) + Pimpedance * (V / V0)^2 Qzip = Qpower + Qcurrent * (V / V0) + Qimpedance * (V / V0)^2\n\nwith V = sqrt(Vr^2 + Vi^2) and V0 the voltage magnitude from the power flow solution\n\nThe current taken for the load is computed as: Izip = (Pzip + j Qzip)^* / (Vr + j Vi)^* Izip = (Pzip - j Qzip) / (Vr - j Vi)\n\nFor constant impedance it is obtained: Izre = (1 / V0)^2 * (Vr * Pimpedance + Vi * Qimpedance) Izim = (1 / V0)^2 * (Vi * Pimpedance - Vr * Qimpedance)\n\nFor constant current it is obtained: Iire = (1 / V0) * ( (Vr * Pcurrent + Vi * Qcurrent) / V ) Iiim = (1 / V0) * ( (Vi * Pcurrent - Vr * Qcurrent) / V )\n\nFor constant power it is obtained: Ipre = (Vr * Ppower + Vi * Qpower) / V^2 Ipim = (Vi * Ppower - Vr * Qpower) / V^2\n\nModel for Exponential Load model given by:\n\nPexp = P0 * (V / V0)^α Qexp = Q0 * (V / V0)^β\n\nThe current taken for the load is computed as: Iexp = (Pexp + j Qexp)^* / (Vr + j Vi)^* Iexp = (Pexp - j Qexp) / (Vr - j Vi)\n\nIt results: Irexp = Vr * P0 * (V^(α - 2) / V0^α) + Vi * Q0 * (V^(β - 2)/ V0^β) Iiim = Vi * P0 * (V^(α - 2) / V0^α) - Vr * Q0 * (V^(β - 2)/ V0^β)\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_activepower_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_activepower_series","text":"Function to compute the active power output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_branch_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_branch_series","text":"Function to compute the current flowing through an AC branch through their series element. The current is computed through the from bus into the to bus.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_field_current_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_field_current_series","text":"Function to compute the field current output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_field_voltage_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_field_voltage_series","text":"Function to compute the field voltage output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_frequency_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_frequency_series","text":"Function to compute the frequency of a Dynamic Injection component.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_imaginary_current_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_imaginary_current_series","text":"Function to compute the imaginary current output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_mechanical_torque_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_mechanical_torque_series","text":"Function to compute the mechanical torque output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_pss_output_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_pss_output_series","text":"Function to compute the pss output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_reactivepower_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_reactivepower_series","text":"Function to compute the active power output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_real_current_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_real_current_series","text":"Function to compute the real current output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_source_voltage_current_series","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_source_voltage_current_series","text":"Function to obtain voltage and output currents for a source. It receives the simulation resutls and an optional argument of the time step of the results.\n\n\n\n\n\n","category":"function"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_state_series-Tuple{SimulationResults, Tuple{String, Symbol}, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_state_series","text":"Function to obtain the state time series of a specific state. It receives the simulation, and a tuple containing the name of the Dynamic Device and the symbol of the state.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_voltage_current_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_voltage_current_series","text":"Function to obtain voltage and output currents for a dynamic device. It receives the simulation, and the name of the Dynamic Device.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_voltage_series-Tuple{Any, Int64, Int64, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_voltage_series","text":"Function to obtain voltage using the bus index (and not the bus number). It receives the solution, the bus index and the total number of buses.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.saturation_function-Tuple{Union{RoundRotorExponential, SalientPoleExponential}, Union{Float64, ForwardDiff.Dual}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.saturation_function","text":"Saturation function for exponential saturation models for machines\n Se(x) = B * x^A\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.saturation_function-Tuple{Union{RoundRotorQuadratic, SalientPoleQuadratic}, Union{Float64, ForwardDiff.Dual}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.saturation_function","text":"Saturation function for quadratic saturation models for machines\n Se(x) = B * (x - A)^2 / x\n\n\n\n\n\n","category":"method"},{"location":"component_models/converter/#Converter","page":"Converter","title":"Converter","text":"","category":"section"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"This component can be used to model the dynamics of the switching process.","category":"page"},{"location":"component_models/converter/#Average-Model-[AverageConverter]","page":"Converter","title":"Average Model [AverageConverter]","text":"","category":"section"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"The average model outputs the desired reference signal since:","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"beginalign\nv_d^textcv approx m_d v_textdc approx fracv_d^textref-signalv_textdc v_textdc approx v_d^textref-signal tag1a \nv_q^textcv approx m_q v_textdc approx fracv_q^textref-signalv_textdc v_textdc approx v_q^textref-signal tag1b\nendalign","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"where m_dq is the modulation signal, and v_dq^textref-signal is the voltage reference signal from the inner loop control.","category":"page"},{"location":"component_models/converter/#Generic-Renewable-Converter-Type-A-[RenewableEnergyConverterTypeA]","page":"Converter","title":"Generic Renewable Converter Type A ```[RenewableEnergyConverterTypeA]","text":"","category":"section"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"This block represents the REGCA model. The equations (without the limiters) are:","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"beginalign\n dotI_p = frac1T_g (I_textpcmd - I_p) tag2a \n dotI_q = frac1T_g (I_textqcmd - I_q) tag2b \n dotV_textmeas = frac1T_fltr (V_t - V_textmeas tag2c)\nendalign","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"on which I_textpcmd and I_textqcmd are the current commands from the inner control and V_t is the bus voltage magnitude. The additional terms and output current are computed as:","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"beginalign\n I_q^textcv = -I_q - I_textqextra tag2d \n I_textqextra = max(K_hv (V_t - V_textolim)) tag2e \n I_p^textcv = G_lv I_p tag2f \nendalign","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"on which G_lv is the gain used for Low Voltage Active Current Management and I_textqextra is the additional current for High Voltage Reactive Current Management.","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"It is important to note that both current commands coming from the inner control were obtained by dividing the active (or reactive) power by the magnitude voltage instead of using the correct phasor formula I = (SV)^*. For that purpose, a correction factor must be applied to obtain the correct output currents in the network reference frame:","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"beginalign*\n I_r + jI_i = (I_p + jI_q) cdot V_t cdot frac1V_r + jV_i \n = (I_p + jI_q) cdot fracV_tV_t e^jtheta \n = (I_p + jI_q) cdot e^-jtheta\nendalign*","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"This correction factor looks like a reference transformation that must be used to properly inject current into the grid. With that the output current is computed as:","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"beginalign\n I_r = I_p^textcv cos(theta) - I_q^textcv sin(theta) tag2g \n I_i = I_p^textcv sin(theta) + I_q^textcv cos(theta) tag2h\nendalign","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"This current source is usually modeled as a Norton equivalent using a parallel impedance with values R_sorce and X_sorce provided in the .raw file. If an RL filter is used, a Voltage Source behind that RL filter (i.e. the converter output voltage) can be computed as:","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"beginalign*\n Z_f = r_f + jl_f \n Z_sorce = R_sorce + jX_sorce \n I_cv = I_r + jI_i \n v_r^textcv + jv_i^textcv = fracI_cv + fracv^textgridZ_ffrac1Z_sorce + frac1Z_f tag2i\nendalign*","category":"page"},{"location":"#PowerSimulationsDynamics.jl","page":"Welcome Page","title":"PowerSimulationsDynamics.jl","text":"","category":"section"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"CurrentModule = PowerSimulationsDynamics","category":"page"},{"location":"#Overview","page":"Welcome Page","title":"Overview","text":"","category":"section"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"PowerSimulationsDynamics.jl is a Julia package for doing Power Systems Dynamic Modeling with Low Inertia Energy Sources.","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"The synchronous machine components supported here are based on commercial models and the academic components are derived from Power System Modelling and Scripting.","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"Inverter models support both commercial models, such as REPC, REEC and REGC type of models; and academic models obtained from grid-following and grid-forming literature such as in \"A Virtual Synchronous Machine implementation for distributed control of power converters in SmartGrids\"","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"The background work on PowerSimulationsDynamics.jl is explained in Revisiting Power Systems Time-domain Simulation Methods and Models","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"@article{lara2023revisiting,\ntitle={Revisiting Power Systems Time-domain Simulation Methods and Models},\nauthor={Lara, Jose Daniel and Henriquez-Auba, Rodrigo and Ramasubramanian, Deepak and Dhople, Sairaj and Callaway, Duncan S and Sanders, Seth},\njournal={arXiv preprint arXiv:2301.10043},\nyear={2023}\n}","category":"page"},{"location":"#Installation","page":"Welcome Page","title":"Installation","text":"","category":"section"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"The latest stable release of PowerSimulationsDynamics.jl can be installed using the Julia package manager with","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"] add PowerSimulationsDynamics","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"For the current development version, \"checkout\" this package with","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"] add PowerSimulationsDynamics#master","category":"page"},{"location":"#Structure","page":"Welcome Page","title":"Structure","text":"","category":"section"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"The following figure shows the interactions between PowerSimulationsDynamics.jl, PowerSystems.jl, ForwardDiff.jl, DiffEqBase.jl and the integrators. The architecture of PowerSimulationsDynamics.jl is such that the power system models are all self-contained and return the model function evaluations. The Jacobian is calculated using automatic differentiation through ForwardDiff.jl, that is used for both numerical integration and small signal analysis. Considering that the resulting models are differential-algebraic equations (DAE), the implementation focuses on the use of implicit solvers, in particular BDF and Rosenbrock methods.","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"
","category":"page"},{"location":"initialization/#Initialization-of-the-Synchronous-Machines","page":"Initialization","title":"Initialization of the Synchronous Machines","text":"","category":"section"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"The initialization of Synchronous Machines is standard in power systems and follows the scheme shown in the figure. Other internal variables are calculated recursively from the power flow solution for the node on which the dynamic device isconnected. (Adapted from Power System Modelling and Scripting Figure 9.2)","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"(Image: init_machine)","category":"page"},{"location":"initialization/#Initialization-of-the-Inverters","page":"Initialization","title":"Initialization of the Inverters","text":"","category":"section"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"Initializing the inverters follows the sequence shown in the figure and has been developed to be compatible with the implementation of custom dynamic components. Given that the process is less studied and standard than the one of the synchronous machine, this page contains more detailed documentation of the process.","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"(Image: init_machine)","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"The first component to be initialized is the filter. Given that the filter is an RLC circuit connected to the grid, its currents and voltages need to match the results of the power flow. The initialization of the filter provides the values for the P and Q used in the outer control and the V and I needed in the inner controls.\nBased on the bus voltage in the system's reference frame V_r and the bus angle theta the PLL's can be initialized to obtain the angle and frequency estimates needed by the outer control.\nThe Outer Control calculates the internal angle delta_olc required by the inner control to estimate the voltage and current phase difference.\nThe DC Source uses the power set-point consistent with the power outputs of the filter to initialize the V_dc set-points. This value is used in the inner control.\nThe inner control takes the phase angle delta_olc and the V_dc to estimate the modulation values of the PWM converter.","category":"page"},{"location":"initialization/","page":"Initialization","title":"Initialization","text":"Note: The initialization of an inverter through the proposed meta-model is actively under development and subject to change. This page will maintain the latest version of the sequence.","category":"page"},{"location":"tutorials_page/#SIIP-Examples","page":"SIIP-Examples","title":"SIIP-Examples","text":"","category":"section"},{"location":"tutorials_page/","page":"SIIP-Examples","title":"SIIP-Examples","text":"All the tutorials for the SIIP project are part of a separate repository SIIP-Examples. You can access the latest PowerSimulationsDynamics.jl tutorial notebooks in this link","category":"page"},{"location":"tutorials_page/","page":"SIIP-Examples","title":"SIIP-Examples","text":"Specific examples of common workflows and models:","category":"page"},{"location":"tutorials_page/","page":"SIIP-Examples","title":"SIIP-Examples","text":"Loading Dynamic Data\nSolving a One Machine against Infinite Bus model\nChanging line modeling assumptions\nUsing an Inverter in a Multi-Machine Model","category":"page"},{"location":"tutorials/tutorial_continuation_pf/#Tutorial-Small-Signal-Analysis-with-Continuation-Power-Flow","page":"Small-Signal Analysis","title":"Tutorial Small Signal Analysis with Continuation Power Flow","text":"","category":"section"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"Originally Contributed by: Rodrigo Henriquez-Auba","category":"page"},{"location":"tutorials/tutorial_continuation_pf/#Introduction","page":"Small-Signal Analysis","title":"Introduction","text":"","category":"section"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"This tutorial will introduce you to the functionality of PowerSimulationsDynamics and PowerFlows for running small signal analysis in a continuation power flow.","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"This tutorial presents a simulation of a two-bus system with a generator (represented with a GENROU + SEXS + TGOV1 model) at bus 1, and a load on bus 2. We will increase the load demand to observe the P-V curve and run a small-signal analysis to check if the system satisfies small-signal stability at different operating points.","category":"page"},{"location":"tutorials/tutorial_continuation_pf/#Dependencies","page":"Small-Signal Analysis","title":"Dependencies","text":"","category":"section"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"using PowerSimulationsDynamics\nPSID = PowerSimulationsDynamics\nusing PowerSystemCaseBuilder\nusing PowerSystems\nusing PowerFlows\nconst PSY = PowerSystems\nusing Plots\ngr()\n\n# Disable Logging to avoid excessive information\nusing Logging\nLogging.disable_logging(Logging.Info); \nLogging.disable_logging(Logging.Warn); ","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"note: Note\nPowerSystemCaseBuilder.jl is a helper library that makes it easier to reproduce examples in the documentation and tutorials. Normally you would pass your local files to create the system data instead of calling the function build_system. For more details visit PowerSystemCaseBuilder Documentation","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"PowerSystems (abbreviated with PSY) is used to properly define the data structure and establish an equilibrium point initial condition with a power flow routine using PowerFlows.","category":"page"},{"location":"tutorials/tutorial_continuation_pf/#Load-the-system","page":"Small-Signal Analysis","title":"Load the system","text":"","category":"section"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"We load the system using PowerSystemCaseBuilder.jl. This system only have a generator without dynamic data on which we can use PowerFlows to generate a P-V (or nose) curve.","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"sys_static = build_system(PSIDSystems, \"2 Bus Load Tutorial\")","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"Note that this system contains an Exponential Load, but the parameters are set up to zero, so it behaves a Constant Power Load:","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"first(get_components(PSY.ExponentialLoad, sys_static))","category":"page"},{"location":"tutorials/tutorial_continuation_pf/#Create-a-P-V-curve","page":"Small-Signal Analysis","title":"Create a P-V curve","text":"","category":"section"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"The next step is to run multiple power flows and store the voltage at the load and the active power. For this example we will set up the power factor to be unitary (i.e. no reactive power at the load). ","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"# Create a Power Range to change the power load active power\nP_range = 0.01:0.01:4.6;\n# Choose the power factor\nload_pf = 1.0;","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"Then create vectors to store the results","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"# PV Curve Results\nP_load_p = Vector{Float64}();\nV_load_p = Vector{Float64}();","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"Then, we run multiple power flows in a for loop by changing the active power of the load:","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"for p in P_range\n # Change the active power and reactive power of the load\n power = p * 1.0\n load = get_component(PSY.ExponentialLoad, sys_static, \"load1021\")\n set_active_power!(load, power)\n q_power = power * tan(acos(load_pf))\n set_reactive_power!(load, q_power)\n # Run Power Flow\n status = solve_ac_powerflow!(sys_static)\n if !status\n # Finish the loop if the power flow fails\n print(\"Power Flow failed at p = $(power)\")\n break\n end\n # Obtain the bus voltage information\n bus = get_component(Bus, sys_static, \"BUS 2\")\n Vm = get_magnitude(bus)\n # Store values in the vectors\n push!(V_load_p, Vm)\n push!(P_load_p, power)\nend","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"The plot can be visualized with:","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"plot(P_load_p,\n V_load_p,\n label = \"PV Curve\",\n xlabel = \"Load Power [pu]\",\n ylabel = \"Load Bus Voltage [pu]\",\n color = :black\n)","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"(Image: plot)","category":"page"},{"location":"tutorials/tutorial_continuation_pf/#Run-Small-Signal-Analysis-besides-the-Continuation-Power-Flow","page":"Small-Signal Analysis","title":"Run Small-Signal Analysis besides the Continuation Power Flow","text":"","category":"section"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"To run a small-signal analysis we require a dynamic model of the machine. We can use PowerSystemCaseBuilder to the load the same system, but with a dynamic model for the generator, including a GENROU + SEXS exciter + TGOV1 governor.","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"sys = build_system(PSIDSystems, \"2 Bus Load Tutorial GENROU\")","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"Here are the components of the generator:","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"first(get_components(DynamicGenerator, sys))","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"Besides the results of the P-V curve, we need to store if the system is small-signal stable or not by looking if there is a positive real part eigenvalue.","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"# Vectors to store stability using a boolean (true for stable).\nstable_vec = Vector{Bool}();\nstatus_vec = Vector{Bool}();\n\n# PV Curve Results\nP_load_p = Vector{Float64}();\nV_load_p = Vector{Float64}();","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"We then run the main for loop by updating the load active power, but in addition we create a PowerSimulationsDynamics simulation on which we can run a small-signal analysis to check stability.","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"for p in P_range\n # Change the active power and reactive power of the load\n power = p * 1.0\n load = get_component(PSY.ExponentialLoad, sys_static, \"load1021\")\n set_active_power!(load, power)\n q_power = power * tan(acos(load_pf))\n set_reactive_power!(load, q_power)\n # Run Power Flow\n status = solve_ac_powerflow!(sys_static)\n if !status\n # Finish the loop if the power flow fails\n print(\"Power Flow failed at p = $(power)\")\n break\n end\n # Obtain the bus voltage information\n bus = get_component(Bus, sys_static, \"BUS 2\")\n Vm = get_magnitude(bus)\n # Store values in the vectors\n push!(V_load_p, Vm)\n push!(P_load_p, power)\n\n # Update Load Power in the GENROU system\n load = get_component(PSY.ExponentialLoad, sys, \"load1021\")\n set_active_power!(load, power)\n q_power = power * tan(acos(load_pf))\n set_reactive_power!(load, q_power)\n # Construct Simulation\n sim = Simulation(ResidualModel, sys, mktempdir(), (0.0, 1.0))\n if sim.status == PSID.BUILT\n # Check small-signal stability\n sm = small_signal_analysis(sim).stable\n # Push results of small-signal stability\n push!(stable_vec, sm)\n # Push results if the simulation was able to be constructed\n push!(status_vec, true)\n else\n # Push results if the simulation was not able to be constructed\n push!(status_vec, false)\n end\nend","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"The following plot showcases the P-V curve, while also showcasing (in red) the regions on which the system is small-signal stable.","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"\n# Find where is stable and unstable\ndict_true_ixs_p = Vector();\ndict_false_ixs_p = Vector();\ndict_true_ixs_p = findall(x->x, stable_vec);\ndict_false_ixs_p = findall(x->!x, stable_vec);\n\n# Create plot\ntrue_ixs = dict_true_ixs_p;\nplot(P_load_p, V_load_p, color = :blue, label = \"PV Curve\", xlabel = \"Load Power [pu]\", ylabel = \"Load Bus Voltage [pu]\")\nplot!(Plots.scatter!(P_load_p[true_ixs] , V_load_p[true_ixs], markerstrokewidth= 0, label = \"GENROU SSA\"))","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"(Image: plot)","category":"page"},{"location":"tutorials/tutorial_continuation_pf/","page":"Small-Signal Analysis","title":"Small-Signal Analysis","text":"This results is consistent with most of the literature for dynamic generator models supplying constant power loads, on which by increasing the active power of the load, produce critical eigenvalues which cross the jomega axis at some point. This is called a Hopf Bifurcation, in this case a subcritical one since the limit cycles are unstable.","category":"page"},{"location":"reference_frames/#Reference-Frames","page":"Reference Frames","title":"Reference Frames","text":"","category":"section"},{"location":"reference_frames/","page":"Reference Frames","title":"Reference Frames","text":"Each dynamic device is defined in its own dq synchronous reference frame (SRF). It is important to note that there are several conventions to do reference frame transformations.","category":"page"},{"location":"reference_frames/#Synchronous-Machines","page":"Reference Frames","title":"Synchronous Machines","text":"","category":"section"},{"location":"reference_frames/","page":"Reference Frames","title":"Reference Frames","text":"The grid is modeled in its own real-imaginary (RI) reference frame. With such, this follows the standard convention that for a voltage angle theta = 0, there is no imaginary part and hence v_h = v_r + j0. Traditionally, the reference frame dq with rotor angle delta for synchronous machines connected to a bus v_hangle theta = v_r + jv_i follows the following convention for transformation of per-unit RMS phasors:","category":"page"},{"location":"reference_frames/","page":"Reference Frames","title":"Reference Frames","text":"beginalign\nv_d + jv_q = (v_r + jv_i) e^-j(delta- pi2) tag1a \nv_d = v_h sin(delta - theta) tag1b \nv_q = v_h cos(delta - theta) tag1c \nleft beginarrayc v_d v_q endarray right = left beginarraycc sin(delta) -cos(delta) cos(delta) sin(delta) endarray right left beginarrayc v_r v_i endarray right tag1d\nendalign","category":"page"},{"location":"reference_frames/","page":"Reference Frames","title":"Reference Frames","text":"Note that hence in a bus of 10angle 0, a rotor angle of delta = 0 implies that v_q = 10 and v_d = 00. This transformation is the one that can be found in most books of Power Systems, such as Kundur, Sauer Pai and in Milano too, and is the convention used in the software to model dynamic models of synchronous machines in their own reference frame.","category":"page"},{"location":"reference_frames/#Inverters","page":"Reference Frames","title":"Inverters","text":"","category":"section"},{"location":"reference_frames/","page":"Reference Frames","title":"Reference Frames","text":"The previously convention is not the standard one used for modeling inverters. Most of inverter and phase-lock loop (PLL) models follow the next convention:","category":"page"},{"location":"reference_frames/","page":"Reference Frames","title":"Reference Frames","text":"beginalign\nv_d + jv_q = (v_r + jv_i) e^-j delta tag2a \nv_d = v_h cos(delta - theta) tag2b \nv_q = -v_h sin(delta - theta) tag2c\nendalign","category":"page"},{"location":"reference_frames/","page":"Reference Frames","title":"Reference Frames","text":"That, contrary to the previous case, when delta = theta = 0 implies that v_d = 10 and v_q = 00. This yields the typical PLL conditions that steer v_q to 0 when delta locks in theta, or when both SRF lock between each other.","category":"page"},{"location":"reference_frames/#Transformation-used","page":"Reference Frames","title":"Transformation used","text":"","category":"section"},{"location":"reference_frames/","page":"Reference Frames","title":"Reference Frames","text":"Given the predominancy of both convention in current work, the software uses both conventions depending on the device modeled. For synchronous machines we used the standard convention (1a)-(1d), while for inverter models we use the predominant convention used nowadays in such models, i.e. (2a)-(2c).","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/#Inverter-Modeling-simulation","page":"Inverter Modeling","title":"Inverter Modeling simulation","text":"","category":"section"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"Originally Contributed by: José Daniel Lara","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/#Introduction","page":"Inverter Modeling","title":"Introduction","text":"","category":"section"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"This tutorial will introduce the modeling of an inverter with Virtual Inertia in a multi-machine model of the system. We will load the data directly from PSS/e dynamic files.","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"The tutorial uses a modified 14-bus system on which all the synchronous machines have been substituted by generators with ESAC1A AVR's and no Turbine Governors.","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"In the first portion of the tutorial we will simulate the system with the original data and cause a line trip between Buses 2 and 4. In the second part of the simulation, we will switch generator 6 with a battery using an inverter and perform the same fault.","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/#Load-the-packages","page":"Inverter Modeling","title":"Load the packages","text":"","category":"section"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"using PowerSimulationsDynamics\nusing PowerSystemCaseBuilder\nusing PowerSystems\nconst PSY = PowerSystems\nusing PowerFlows\nusing Logging\nusing Sundials\nusing Plots","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"note: Note\nPowerSystemCaseBuilder.jl is a helper library that makes it easier to reproduce examples in the documentation and tutorials. Normally you would pass your local files to create the system data instead of calling the function build_system. For more details visit PowerSystemCaseBuilder Documentation","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"Create the system using PowerSystemCaseBuilder.jl:","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"sys = build_system(PSIDSystems, \"14 Bus Base Case\")","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"PowerSystemCaseBuilder.jl is a helper library that makes it easier to reproduce examples in the documentation and tutorials. Normally you would pass your local files to create the system data.","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"Define Simulation Problem with a 20 second simulation period and the branch trip at t = 1.0:","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"sim = Simulation(\n ResidualModel, #Type of model used\n sys, #system\n mktempdir(), #path for the simulation output\n (0.0, 20.0), #time span\n BranchTrip(1.0, Line, \"BUS 02-BUS 04-i_1\");\n console_level = Logging.Info,\n)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"Now that the system is initialized, we can verify the system states for potential issues.","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"show_states_initial_value(sim)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"We execute the simulation with an additional tolerance for the solver set at 1e-8:","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"execute!(sim, IDA(); abstol = 1e-8)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"Using PowerSimulationsDynamics tools for exploring the results, we can plot all the voltage results for the buses:","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"result = read_results(sim)\np = plot();\nfor b in get_components(ACBus, sys)\n voltage_series = get_voltage_magnitude_series(result, get_number(b))\n plot!(\n p,\n voltage_series;\n xlabel = \"Time\",\n ylabel = \"Voltage Magnitude [pu]\",\n label = \"Bus - $(get_name(b))\",\n );\nend","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"(Image: plot)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"We can also explore the frequency of the different generators","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"p2 = plot();\nfor g in get_components(ThermalStandard, sys)\n state_series = get_state_series(result, (get_name(g), :ω))\n plot!(\n p2,\n state_series;\n xlabel = \"Time\",\n ylabel = \"Speed [pu]\",\n label = \"$(get_name(g)) - ω\",\n );\nend","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"(Image: plot)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"It is also possible to explore the small signal stability of this system we created.","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"res = small_signal_analysis(sim)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/#The-eigenvalues-can-be-explored","page":"Inverter Modeling","title":"The eigenvalues can be explored","text":"","category":"section"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"res.eigenvalues","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/#Modifying-the-system-and-adding-storage","page":"Inverter Modeling","title":"Modifying the system and adding storage","text":"","category":"section"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"Reload the system for this example:","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"sys = build_system(PSIDSystems, \"14 Bus Base Case\")\n\n# We want to remove the generator 6 and the dynamic component attached to it.\nthermal_gen = get_component(ThermalStandard, sys, \"generator-6-1\")\nremove_component!(sys, get_dynamic_injector(thermal_gen))\nremove_component!(sys, thermal_gen)\n\n# We can now define our storage device and add it to the system\nstorage = GenericBattery(\n name = \"Battery\",\n bus = get_component(Bus, sys, \"BUS 06\"),\n available = true,\n prime_mover = PrimeMovers.BA,\n active_power = 0.6,\n reactive_power = 0.16,\n rating = 1.1,\n base_power = 25.0,\n initial_energy = 50.0,\n state_of_charge_limits = (min = 5.0, max = 100.0),\n input_active_power_limits = (min = 0.0, max = 1.0),\n output_active_power_limits = (min = 0.0, max = 1.0),\n reactive_power_limits = (min = -1.0, max = 1.0),\n efficiency = (in = 0.80, out = 0.90),\n)\n\nadd_component!(sys, storage)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"A good sanity check it running a power flow on the system to make sure all the components are properly scaled and that the system is properly balanced. We can use PowerSystems to perform this check. We can get the results back and perform a sanity check.","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"res = solve_powerflow(ACPowerFlow(), sys)\nres[\"bus_results\"]","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"After verifying that the system works, we can define our inverter dynamics and add it to the battery that has already been stored in the system.","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"inverter = DynamicInverter(\n name = get_name(storage),\n ω_ref = 1.0, # ω_ref,\n converter = AverageConverter(rated_voltage = 138.0, rated_current = 100.0),\n outer_control = OuterControl(\n VirtualInertia(Ta = 2.0, kd = 400.0, kω = 20.0),\n ReactivePowerDroop(kq = 0.2, ωf = 1000.0),\n ),\n inner_control = VoltageModeControl(\n kpv = 0.59, #Voltage controller proportional gain\n kiv = 736.0, #Voltage controller integral gain\n kffv = 0.0, #Binary variable enabling the voltage feed-forward in output of current controllers\n rv = 0.0, #Virtual resistance in pu\n lv = 0.2, #Virtual inductance in pu\n kpc = 1.27, #Current controller proportional gain\n kic = 14.3, #Current controller integral gain\n kffi = 0.0, #Binary variable enabling the current feed-forward in output of current controllers\n ωad = 50.0, #Active damping low pass filter cut-off frequency\n kad = 0.2,\n ),\n dc_source = FixedDCSource(voltage = 600.0),\n freq_estimator = KauraPLL(\n ω_lp = 500.0, #Cut-off frequency for LowPass filter of PLL filter.\n kp_pll = 0.084, #PLL proportional gain\n ki_pll = 4.69, #PLL integral gain\n ),\n filter = LCLFilter(lf = 0.08, rf = 0.003, cf = 0.074, lg = 0.2, rg = 0.01),\n)\nadd_component!(sys, inverter, storage)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"These are the current system components:","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"sys","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"Define Simulation problem using the same parameters:","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"sim = Simulation(\n ResidualModel, #Type of model used\n sys, #system\n mktempdir(), #path for the simulation output\n (0.0, 20.0), #time span\n BranchTrip(1.0, Line, \"BUS 02-BUS 04-i_1\");\n console_level = Logging.Info,\n)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"We can verify the small signal stability of the system before running the simulation:","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"res = small_signal_analysis(sim)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"Exploring the eigenvalues:","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"res.eigenvalues","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"We execute the simulation","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"execute!(sim, IDA(); abstol = 1e-8)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"Using PowerSimulationsDynamics tools for exploring the results, we can plot all the voltage results for the buses","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"result = read_results(sim)\np = plot();\nfor b in get_components(ACBus, sys)\n voltage_series = get_voltage_magnitude_series(result, get_number(b))\n plot!(\n p,\n voltage_series;\n xlabel = \"Time\",\n ylabel = \"Voltage Magnitude [pu]\",\n label = \"Bus - $(get_name(b))\",\n );\nend","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"(Image: plot)","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"We can also explore the frequency of the different static generators and storage","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"p2 = plot();\nfor g in get_components(ThermalStandard, sys)\n state_series = get_state_series(result, (get_name(g), :ω))\n plot!(\n p2,\n state_series;\n xlabel = \"Time\",\n ylabel = \"Speed [pu]\",\n label = \"$(get_name(g)) - ω\",\n );\nend\nstate_series = get_state_series(result, (\"Battery\", :ω_oc))\nplot!(p2, state_series; xlabel = \"Time\", ylabel = \"Speed [pu]\", label = \"Battery - ω\");","category":"page"},{"location":"tutorials/tutorial_inverter_modeling/","page":"Inverter Modeling","title":"Inverter Modeling","text":"(Image: plot)","category":"page"},{"location":"time_delays/#Delays","page":"Time Delays","title":"Delays","text":"","category":"section"},{"location":"time_delays/","page":"Time Delays","title":"Time Delays","text":"PowerSimulationsDynamics supports models with constant delays in a mass matrix formulation:","category":"page"},{"location":"time_delays/","page":"Time Delays","title":"Time Delays","text":"beginalign\nMfracdx(t)dt = f(x(t) x(t-tau_1) x(t-tau_N)) \nendalign","category":"page"},{"location":"time_delays/","page":"Time Delays","title":"Time Delays","text":"For more information on solving such models, refer to the documentation for DelayDiffEq.jl package.","category":"page"},{"location":"time_delays/","page":"Time Delays","title":"Time Delays","text":"The following models include time delays:","category":"page"},{"location":"time_delays/","page":"Time Delays","title":"Time Delays","text":"DEGOV","category":"page"},{"location":"time_delays/","page":"Time Delays","title":"Time Delays","text":"There is currently limited support for including models with time delays. The following limitations apply:","category":"page"},{"location":"time_delays/","page":"Time Delays","title":"Time Delays","text":"Only constant delays are supported (state dependent delays are not).\nSystem models with delays must use MassMatrixModel formulation (ResidualModel is not currently compatible).\nSystem models with delays are not compatible with small signal analysis tools.\nThe system formulation with delays is not compatible with automatic differentiation for calculating the gradient with respect to time. The setting autodiff=false should be set when passing the solver (e.g. MethodofSteps(Rodas5(autodiff=false))).","category":"page"},{"location":"component_models/dc_source/#DC-Source","page":"DC Sources","title":"DC Source","text":"","category":"section"},{"location":"component_models/dc_source/","page":"DC Sources","title":"DC Sources","text":"This component can be used to model the dynamics of the DC side of the converter.","category":"page"},{"location":"component_models/dc_source/#Fixed-DC-Source-[FixedDCSource]","page":"DC Sources","title":"Fixed DC Source [FixedDCSource]","text":"","category":"section"},{"location":"component_models/dc_source/","page":"DC Sources","title":"DC Sources","text":"This is a model that set the DC voltage to a fixed value v_textdc = v_textdc^textfix.","category":"page"},{"location":"tutorials/tutorial_omib/#One-Machine-against-Infinite-Bus-(OMIB)-Simulation","page":"OMIB","title":"One Machine against Infinite Bus (OMIB) Simulation","text":"","category":"section"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"Originally Contributed by: Rodrigo Henriquez-Auba and José Daniel Lara","category":"page"},{"location":"tutorials/tutorial_omib/#Introduction","page":"OMIB","title":"Introduction","text":"","category":"section"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"This tutorial will introduce you to the functionality of PowerSimulationsDynamics for running power system dynamic simulations.","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"This tutorial presents a simulation of a two-bus system with an infinite bus (represented as a voltage source behind an impedance) at bus 1, and a classic machine on bus 2. The perturbation will be the trip of one of the two circuits (doubling its resistance and impedance) of the line that connects both buses.","category":"page"},{"location":"tutorials/tutorial_omib/#Dependencies","page":"OMIB","title":"Dependencies","text":"","category":"section"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"using PowerSimulationsDynamics\nPSID = PowerSimulationsDynamics\nusing PowerSystemCaseBuilder\nusing PowerSystems\nconst PSY = PowerSystems\nusing Sundials\nusing Plots\ngr()","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"note: Note\nPowerSystemCaseBuilder.jl is a helper library that makes it easier to reproduce examples in the documentation and tutorials. Normally you would pass your local files to create the system data instead of calling the function build_system. For more details visit PowerSystemCaseBuilder Documentation","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"PowerSystems (abbreviated with PSY) is used to properly define the data structure and establish an equilibrium point initial condition with a power flow routine, while Sundials is used to solve the problem defined in PowerSimulationsDynamics.","category":"page"},{"location":"tutorials/tutorial_omib/#Load-the-system","page":"OMIB","title":"Load the system","text":"","category":"section"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"We load the system using PowerSystemCaseBuilder.jl:","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"omib_sys = build_system(PSIDSystems, \"OMIB System\")","category":"page"},{"location":"tutorials/tutorial_omib/#Build-the-simulation-and-initialize-the-problem","page":"OMIB","title":"Build the simulation and initialize the problem","text":"","category":"section"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"The next step is to create the simulation structure. This will create the indexing of our system that will be used to formulate the differential-algebraic system of equations. To do so, it is required to specify the perturbation that will occur in the system. PowerSimulationsDynamics supports multiple types of perturbations. See Perturbations","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"Here, we will use a Branch Trip perturbation, that is modeled by modifying the specifying which line we want to trip. In this case we disconnect one of the lines that connects BUS 1 and BUS 2, named \"BUS 1-BUS 2-i_1\".","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"With this, we are ready to create our simulation structure:","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"time_span = (0.0, 30.0)\nperturbation_trip = BranchTrip(1.0, Line, \"BUS 1-BUS 2-i_1\")\nsim = PSID.Simulation(\n ResidualModel, # Type of formulation\n omib_sys, # System\n mktempdir(), # Output directory\n time_span,\n perturbation_trip)","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"This will automatically initialize the system by running a power flow and update V_ref, P_ref and hence eq_p (the internal voltage) to match the solution of the power flow. It will also initialize the states in the equilibrium, which can be printed with:","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"show_states_initial_value(sim)","category":"page"},{"location":"tutorials/tutorial_omib/#Run-the-Simulation","page":"OMIB","title":"Run the Simulation","text":"","category":"section"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"Finally, to run the simulation we simply use:","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"execute!(\n sim, #simulation structure\n IDA(), #Sundials DAE Solver\n dtmax = 0.02, #Arguments: Maximum timestep allowed\n);","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"In some cases, the dynamic time step used for the simulation may fail. In such case, the keyword argument dtmax can be used to limit the maximum time step allowed for the simulation.","category":"page"},{"location":"tutorials/tutorial_omib/#Exploring-the-solution","page":"OMIB","title":"Exploring the solution","text":"","category":"section"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"First, we need to load the simulation results into memory:","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"results = read_results(sim)","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"PowerSimulationsDynamics has two functions to obtain different states of the solution:","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"get_state_series(results, (\"generator-102-1\", :δ)): can be used to obtain the solution as a tuple of time and the required state. In this case, we are obtaining the rotor angle :δ of the generator named \"generator-102-1\"`.","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"angle = get_state_series(results, (\"generator-102-1\", :δ));\nplot(angle, xlabel = \"time\", ylabel = \"rotor angle [rad]\", label = \"rotor angle\")","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"(Image: plot)","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"get_voltage_magnitude_series(results, 102): can be used to obtain the voltage magnitude as a tuple of time and voltage. In this case, we are obtaining the voltage magnitude at bus 102 (where the generator is located).","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"volt = get_voltage_magnitude_series(results, 102);\nplot(volt, xlabel = \"time\", ylabel = \"Voltage [pu]\", label = \"V_2\")","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"(Image: plot)","category":"page"},{"location":"tutorials/tutorial_omib/#Optional:-Small-Signal-Analysis","page":"OMIB","title":"Optional: Small Signal Analysis","text":"","category":"section"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"PowerSimulationsDynamics uses automatic differentiation to compute the reduced Jacobian of the system for the differential states. This can be used to analyze the local stability of the linearized system. We need to re-initialize our simulation:","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"sim2 = Simulation(ResidualModel, omib_sys, mktempdir(), time_span)\nsmall_sig = small_signal_analysis(sim2)","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"The small_sig result can report the reduced jacobian for delta and omega,","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"small_sig.reduced_jacobian","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"and can also be used to report the eigenvalues of the reduced linearized system:","category":"page"},{"location":"tutorials/tutorial_omib/","page":"OMIB","title":"OMIB","text":"small_sig.eigenvalues","category":"page"},{"location":"api/internal/#Internal","page":"Internal API Reference","title":"Internal","text":"","category":"section"},{"location":"api/internal/","page":"Internal API Reference","title":"Internal API Reference","text":"CurrentModule = PowerSimulationsDynamics\nDocTestSetup = quote\n using PowerSimulationsDynamics\nend","category":"page"},{"location":"api/internal/","page":"Internal API Reference","title":"Internal API Reference","text":"Modules = [PowerSimulationsDynamics]\nPublic = false\nPrivate = true","category":"page"},{"location":"api/internal/#PowerSimulationsDynamics.BUILD_STATUS","page":"Internal API Reference","title":"PowerSimulationsDynamics.BUILD_STATUS","text":"Defines the status of the simulation object\n\n\n\n\n\n","category":"type"},{"location":"api/internal/#PowerSimulationsDynamics.BranchWrapper","page":"Internal API Reference","title":"PowerSimulationsDynamics.BranchWrapper","text":"Wraps DynamicBranch devices from PowerSystems to handle changes in controls and connection status, and allocate the required indexes of the state space.\n\n\n\n\n\n","category":"type"},{"location":"api/internal/#PowerSimulationsDynamics.DynamicWrapper","page":"Internal API Reference","title":"PowerSimulationsDynamics.DynamicWrapper","text":"Wraps DynamicInjection devices from PowerSystems to handle changes in controls and connection status, and allocate the required indexes of the state space.\n\n\n\n\n\n","category":"type"},{"location":"api/internal/#PowerSimulationsDynamics.SimulationInputs-Tuple{Type{MassMatrixModel}, System, Union{ConstantFrequency, ReferenceBus}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.SimulationInputs","text":"SimulationInputs build function for MassMatrixModels\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.SimulationInputs-Tuple{Type{ResidualModel}, System, Union{ConstantFrequency, ReferenceBus}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.SimulationInputs","text":"SimulationInputs build function for ResidualModels\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.generator_inner_vars","page":"Internal API Reference","title":"PowerSimulationsDynamics.generator_inner_vars","text":"Generator Inner Vars:\n\nτe_var :: Electric torque\nτm_var :: Mechanical torque\nVf_var :: Field voltage\nV_pss_var :: Additional PSS voltage\nVR_gen_var :: Real part of the terminal voltage\nVI_gen_var :: Imaginary part of the terminal voltage\nψd_var :: Stator Flux (if defined) in the d-axis\nψq_var :: Stator Flux (if defined) in the q-axis\n\n\n\n\n\n","category":"type"},{"location":"api/internal/#PowerSimulationsDynamics.inverter_inner_vars","page":"Internal API Reference","title":"PowerSimulationsDynamics.inverter_inner_vars","text":"Inverter Inner Vars:\n\nmd_var :: Modulation signal on the d-component\nmq_var :: Modulation signal on the q-component\nVdc_var :: DC voltage supplied by the DC source\nVr_filter_var :: Voltage seen in the capacitor of the filter in the R-component\nVi_filter_var :: Voltage seen in the capacitor of the filter in the I-component\nθ_freq_estimator_var :: Angle estimated by the frequency estimator.\nω_freq_estimator_var :: Frequency estimated by the frequency estimator.\nV_oc_var :: Control voltage reference in the d-axis supplied from the outer loop control to the inner loop (for Voltage Mode Control)\nId_oc_var :: Control current reference in the d-axis supplied from the outer loop control to the inner loop (for Current Mode Control)\nIq_oc_var :: Control current reference in the q-axis supplied from the outer loop control to the inner loop (for Current Mode Control)\nId_ic_var :: Control current reference in the d-axis supplied from the inner loop control to the converter (for Generic Models)\nIq_ic_var :: Control current reference in the q-axis supplied from the inner loop control to the converter (for Generic Models)\nIr_cnv_var :: Control current reference in the R-axis supplied from the converter to the filter (for Generic Models)\nIi_cnv_var :: Control current reference in the I-axis supplied from the converter to the filter (for Generic Models)\nω_oc_var :: Control frequency supplied from the outer loop control the inner loop\nθ_oc_var :: Variation of the angle (PLL or VSM) of the inverter\nVr_inv_var :: Real terminal voltage on the inverter\nVi_inv_var :: Imaginary terminal voltage on the inverter\nVr_cnv_var :: Voltage supplied from the converter in the R-component\nVi_cnv_var :: Voltage supplied from the converter in the I-component\nP_ES_var :: Power supplied from the Energy Source side\n\n\n\n\n\n","category":"type"},{"location":"api/internal/#PowerSimulationsDynamics._field_current-Tuple{SalientPoleExponential, String, Vector{Float64}, Vector{Float64}, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._field_current","text":"Function to obtain the field current time series of a Dynamic Generator with machine type GENSAE.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._field_current-Tuple{SalientPoleQuadratic, String, Vector{Float64}, Vector{Float64}, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._field_current","text":"Function to obtain the field current time series of a Dynamic Generator with machine type GENSAL.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._field_current-Union{Tuple{M}, Tuple{M, String, Vector{Float64}, Vector{Float64}, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}} where M<:Machine","page":"Internal API Reference","title":"PowerSimulationsDynamics._field_current","text":"Function to obtain the field current time series of a Dynamic Generator. It is dispatched via the machine type. By default, machine does not have support for field current\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._field_current-Union{Tuple{M}, Tuple{M, String, Vector{Float64}, Vector{Float64}, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}} where M<:Union{RoundRotorExponential, RoundRotorQuadratic}","page":"Internal API Reference","title":"PowerSimulationsDynamics._field_current","text":"Function to obtain the field current time series of a Dynamic Generator with machine type GENROU/GENROE.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._field_voltage-Tuple{AVRFixed, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._field_voltage","text":"Function to obtain the field voltage time series of a Dynamic Generator with avr AVRFixed.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._field_voltage-Tuple{ESST1A, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._field_voltage","text":"Function to obtain the field voltage time series of a Dynamic Generator with avr ESST1A.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._field_voltage-Tuple{SCRX, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._field_voltage","text":"Function to obtain the field voltage time series of a Dynamic Generator with avr SCRX.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._field_voltage-Tuple{Union{ESAC1A, EXAC1}, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._field_voltage","text":"Function to obtain the field voltage time series of a Dynamic Generator with avr ESAC1A and EXAC1.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._field_voltage-Union{Tuple{A}, Tuple{A, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}} where A<:AVR","page":"Internal API Reference","title":"PowerSimulationsDynamics._field_voltage","text":"Function to obtain the field voltage time series of a Dynamic Generator with avrs that have the field voltage as a state. By default it is assumed that the models have that state.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._frequency-Union{Tuple{G}, Tuple{F}, Tuple{OuterControl{ActivePowerDroop, ReactivePowerDroop}, F, String, SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where {F<:FrequencyEstimator, G<:DynamicInverter}","page":"Internal API Reference","title":"PowerSimulationsDynamics._frequency","text":"Function to obtain the frequency time series of a droop grid forming inverter out of the DAE Solution. It is dispatched via the OuterControl type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._frequency-Union{Tuple{G}, Tuple{F}, Tuple{OuterControl{ActiveVirtualOscillator, ReactiveVirtualOscillator}, F, String, SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where {F<:FrequencyEstimator, G<:DynamicInverter}","page":"Internal API Reference","title":"PowerSimulationsDynamics._frequency","text":"Function to obtain the frequency time series of a VOC grid forming inverter out of the DAE Solution. It is dispatched via the OuterControl type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._frequency-Union{Tuple{G}, Tuple{F}, Tuple{OuterControl{VirtualInertia, ReactivePowerDroop}, F, String, SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where {F<:FrequencyEstimator, G<:DynamicInverter}","page":"Internal API Reference","title":"PowerSimulationsDynamics._frequency","text":"Function to obtain the frequency time series of a virtual inertia grid forming inverter out of the DAE Solution. It is dispatched via the OuterControl type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._frequency-Union{Tuple{G}, Tuple{OuterControl{ActivePowerPI, ReactivePowerPI}, KauraPLL, String, SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicInverter","page":"Internal API Reference","title":"PowerSimulationsDynamics._frequency","text":"Function to obtain the frequency time series of a grid-following inverter with KauraPLL out of the DAE Solution. It is dispatched via the OuterControl and FrequencyEstimator type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._frequency-Union{Tuple{G}, Tuple{OuterControl{ActivePowerPI, ReactivePowerPI}, ReducedOrderPLL, String, SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicInverter","page":"Internal API Reference","title":"PowerSimulationsDynamics._frequency","text":"Function to obtain the frequency time series of a grid-following inverter with ReducedOrderPLL out of the DAE Solution. It is dispatched via the OuterControl and FrequencyEstimator type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._machine_current-Tuple{BaseMachine, String, Vector{Float64}, Vector{Float64}, Float64, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._machine_current","text":"Function to obtain the output current time series of a Classic Machine model out of the DAE Solution. It is dispatched via the machine type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._machine_current-Tuple{OneDOneQMachine, String, Vector{Float64}, Vector{Float64}, Float64, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._machine_current","text":"Function to obtain the output current time series of a One-D-One-Q model out of the DAE Solution. It is dispatched via the machine type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._machine_current-Tuple{SauerPaiMachine, String, Vector{Float64}, Vector{Float64}, Float64, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._machine_current","text":"Function to obtain the output current time series of a SauerPaiMachine model out of the DAE Solution. It is dispatched via the machine type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._machine_current-Tuple{Union{AndersonFouadMachine, MarconatoMachine}, String, Vector{Float64}, Vector{Float64}, Float64, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._machine_current","text":"Function to obtain the output current time series of a Marconato or AndersonFouad model out of the DAE Solution. It is dispatched via the machine type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._machine_current-Tuple{Union{RoundRotorExponential, RoundRotorQuadratic}, String, Vector{Float64}, Vector{Float64}, Float64, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._machine_current","text":"Function to obtain the output current time series of a GENROU/GENROE model out of the DAE Solution. It is dispatched via the machine type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._machine_current-Tuple{Union{SalientPoleExponential, SalientPoleQuadratic}, String, Vector{Float64}, Vector{Float64}, Float64, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._machine_current","text":"Function to obtain the output current time series of a GENSAL/GENSAE model out of the DAE Solution. It is dispatched via the machine type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._machine_current-Tuple{Union{SimpleAFMachine, SimpleMarconatoMachine}, String, Vector{Float64}, Vector{Float64}, Float64, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._machine_current","text":"Function to obtain the output current time series of a SimpleMarconato or SimpleAndersonFouad model out of the DAE Solution. It is dispatched via the machine type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._make_reduced_jacobian_index-Tuple{Any, Any}","page":"Internal API Reference","title":"PowerSimulationsDynamics._make_reduced_jacobian_index","text":"Finds the location of the differential states in the reduced Jacobian\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._mechanical_torque-Tuple{DEGOV, String, SimulationResults, Union{Nothing, Float64}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._mechanical_torque","text":"Function to obtain the mechanical torque time series of a Dynamic Generator with DEGOV Turbine Governor.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._mechanical_torque-Tuple{GasTG, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._mechanical_torque","text":"Function to obtain the mechanical torque time series of a Dynamic Generator with GasTG (GAST) Turbine Governor.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._mechanical_torque-Tuple{HydroTurbineGov, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._mechanical_torque","text":"Function to obtain the mechanical torque time series of a Dynamic Generator with HydroTurbineGov (HYGOV) Turbine Governor.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._mechanical_torque-Tuple{SteamTurbineGov1, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._mechanical_torque","text":"Function to obtain the mechanical torque time series of a Dynamic Generator with SteamTurbineGov1 (TGOV1) Turbine Governor.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._mechanical_torque-Tuple{TGFixed, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._mechanical_torque","text":"Function to obtain the mechanical torque time series of a Dynamic Generator with TGFixed Turbine Governor.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._mechanical_torque-Tuple{TGTypeI, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._mechanical_torque","text":"Function to obtain the mechanical torque time series of a Dynamic Generator with TGTypeI Turbine Governor.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._mechanical_torque-Tuple{TGTypeII, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._mechanical_torque","text":"Function to obtain the mechanical torque time series of a Dynamic Generator with TGTypeII Turbine Governor.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._output_current-Union{Tuple{G}, Tuple{C}, Tuple{LCLFilter, C, String, Vector{Float64}, Vector{Float64}, Float64, SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where {C<:Converter, G<:DynamicInverter}","page":"Internal API Reference","title":"PowerSimulationsDynamics._output_current","text":"Function to obtain the output current time series of a LCL Filter model out of the DAE Solution. It is dispatched via the Filter type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._output_current-Union{Tuple{G}, Tuple{RLFilter, RenewableEnergyConverterTypeA, String, Vector{Float64}, Vector{Float64}, Float64, SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicInverter","page":"Internal API Reference","title":"PowerSimulationsDynamics._output_current","text":"Function to obtain the output current time series of a REGCA converter model out of the DAE Solution. It is dispatched via the Converter type.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._post_proc_state_series-Tuple{Any, Int64, Nothing}","page":"Internal API Reference","title":"PowerSimulationsDynamics._post_proc_state_series","text":"Internal function to obtain as a Vector of Float64 of a specific state. It receives the solution and the global index for a state.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._pss_output-Tuple{IEEEST, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._pss_output","text":"Function to obtain the pss output time series of a Dynamic Generator with pss IEEEST.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics._pss_output-Tuple{PSSFixed, String, SimulationResults, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics._pss_output","text":"Function to obtain the pss output time series of a Dynamic Generator with pss PSSFixed.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_field_current-Union{Tuple{G}, Tuple{SimulationResults, G, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicGenerator","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_field_current","text":"Function to obtain the field current time series of a Dynamic Generator model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific current.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_field_current-Union{Tuple{G}, Tuple{SimulationResults, G, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicInverter","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_field_current","text":"Function to obtain the field current time series of a Dynamic Inverter model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It must return nothing since field current does not exists in inverters.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_field_voltage-Union{Tuple{G}, Tuple{SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicGenerator","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_field_voltage","text":"Function to obtain the field voltage time series of a Dynamic Generator model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific voltage.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_field_voltage-Union{Tuple{G}, Tuple{SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicInverter","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_field_voltage","text":"Function to obtain the field current time series of a Dynamic Inverter model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It must return nothing since field voltage does not exists in inverters.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_frequency-Union{Tuple{G}, Tuple{SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicGenerator","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_frequency","text":"Function to obtain the output frequency time series of a DynamicGenerator\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_mechanical_torque-Union{Tuple{G}, Tuple{SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicGenerator","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_mechanical_torque","text":"Function to obtain the mechanical torque time series of a Dynamic Generator model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific torque.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_mechanical_torque-Union{Tuple{G}, Tuple{SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicInverter","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_mechanical_torque","text":"Function to obtain the mechanical torque time series of a Dynamic Inverter model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It must return nothing since mechanical torque is not used in inverters.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Tuple{SimulationResults, AggregateDistributedGenerationA, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Function to obtain the output current time series of a AggregateDistributedGenerationA (DERA) model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Tuple{SimulationResults, ExponentialLoad, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Function to obtain the output current time series of a ExponentialLoad model. \n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Tuple{SimulationResults, PeriodicVariableSource, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Function to obtain the output current time series of a PeriodicVariableSource model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific current. computeoutputcurrent(::SimulationResults, ::PeriodicVariableSource, ::Vector{Float64}, ::Vector{Float64}, ::Nothing)\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Tuple{SimulationResults, PowerLoad, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Function to obtain the output current time series of a PowerLoad model. \n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Tuple{SimulationResults, SimplifiedSingleCageInductionMachine, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Function to obtain the output current time series of a 3th Order Induction Machine model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. \n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Tuple{SimulationResults, SingleCageInductionMachine, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Function to obtain the output current time series of a 5th Order Induction Machine model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. \n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Tuple{SimulationResults, StandardLoad, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Function to obtain the output current time series of a PowerLoad model. \n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Union{Tuple{G}, Tuple{SimulationResults, G, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicGenerator","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Function to obtain the output current time series of a Dynamic Generator model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific current.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Union{Tuple{G}, Tuple{SimulationResults, G, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicInverter","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Function to obtain the output current time series of a Dynamic Inverter model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific current.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_output_current-Union{Tuple{I}, Tuple{SimulationResults, I, Vector{Float64}, Vector{Float64}, Union{Nothing, Float64, Vector{Float64}}}} where I<:DynamicInjection","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_output_current","text":"Default function to compute output current. Returns an error\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.compute_pss_output-Union{Tuple{G}, Tuple{SimulationResults, G, Union{Nothing, Float64, Vector{Float64}}}} where G<:DynamicGenerator","page":"Internal API Reference","title":"PowerSimulationsDynamics.compute_pss_output","text":"Function to obtain the pss output time series of a Dynamic Generator model out of the DAE Solution. It receives the simulation inputs, the dynamic device and bus voltage. It is dispatched for device type to compute the specific output.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.configure_logging-Tuple{}","page":"Internal API Reference","title":"PowerSimulationsDynamics.configure_logging","text":"configure_logging(;\n console_level = Logging.Error,\n file_level = Logging.Info,\n filename = \"power-simulations.log\",\n)\n\nCreates console and file loggers.\n\nNote: Log messages may not be written to the file until flush() or close() is called on the returned logger.\n\nArguments\n\nconsole_level = Logging.Error: level for console messages\nfile_level = Logging.Info: level for file messages\nfilename::String = power-simulations.log: log file\n\nExample\n\nlogger = configure_logging(console_level = Logging.Info)\n@info \"log message\"\nclose(logger)\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.device!-Union{Tuple{T}, Tuple{AbstractArray{T}, AbstractArray{T}, T, T, AbstractArray{T}, AbstractArray{T}, AbstractArray{T}, AbstractArray{T}, PowerSimulationsDynamics.DynamicWrapper{ActiveConstantPowerLoad}, Any, Any}} where T<:Union{Float64, ForwardDiff.Dual}","page":"Internal API Reference","title":"PowerSimulationsDynamics.device!","text":"Model of 12-state Active Constant Power Load in Julia. Based on the paper Malicious Control of an Active Load in an Islanded Mixed-Source Microgrid by C. Roberts, U. Markovic, D. Arnold and D. Callaway.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.device!-Union{Tuple{T}, Tuple{AbstractArray{T}, AbstractArray{T}, T, T, AbstractArray{T}, AbstractArray{T}, AbstractArray{T}, AbstractArray{T}, PowerSimulationsDynamics.DynamicWrapper{CSVGN1}, Any, Any}} where T<:Union{Float64, ForwardDiff.Dual}","page":"Internal API Reference","title":"PowerSimulationsDynamics.device!","text":"Model of Static Shunt Compensator: CSVGN1.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.device!-Union{Tuple{T}, Tuple{AbstractArray{T}, AbstractArray{T}, T, T, AbstractArray{T}, AbstractArray{T}, AbstractArray{T}, AbstractArray{T}, PowerSimulationsDynamics.DynamicWrapper{SimplifiedSingleCageInductionMachine}, Any, Any}} where T<:Union{Float64, ForwardDiff.Dual}","page":"Internal API Reference","title":"PowerSimulationsDynamics.device!","text":"Model of 3-state (SimplifiedSingleCageInductionMachine) induction motor in Julia. Based on the 3rd order model derived in Prabha Kundur's Book and the equations in \"Analysis of Electric Machinery and Drive Systems\" by Paul Krause, Oleg Wasynczuk and Scott Sudhoff.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.device!-Union{Tuple{T}, Tuple{AbstractArray{T}, AbstractArray{T}, T, T, AbstractArray{T}, AbstractArray{T}, AbstractArray{T}, AbstractArray{T}, PowerSimulationsDynamics.DynamicWrapper{SingleCageInductionMachine}, Any, Any}} where T<:Union{Float64, ForwardDiff.Dual}","page":"Internal API Reference","title":"PowerSimulationsDynamics.device!","text":"Model of 5-state (SingleCageInductionMachine) induction motor in Julia. Refer to \"Analysis of Electric Machinery and Drive Systems\" by Paul Krause, Oleg Wasynczuk and Scott Sudhoff for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.initialize_mach_shaft!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{Any, StaticInjection, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{AndersonFouadMachine, S, A, TG, P}}, AbstractVector}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.initialize_mach_shaft!","text":"Initialitation of model of 6-state (Anderson-Fouad) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.initialize_mach_shaft!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{Any, StaticInjection, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{BaseMachine, S, A, TG, P}}, AbstractVector}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.initialize_mach_shaft!","text":"Initialitation of model of 0-state synchronous (classic model) machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.initialize_mach_shaft!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{Any, StaticInjection, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{MarconatoMachine, S, A, TG, P}}, AbstractVector}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.initialize_mach_shaft!","text":"Initialitation of model of 6-state (Marconato) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.initialize_mach_shaft!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{Any, StaticInjection, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{OneDOneQMachine, S, A, TG, P}}, AbstractVector}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.initialize_mach_shaft!","text":"Initialitation of model of 2-state (One d- and One q-) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.initialize_mach_shaft!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{Any, StaticInjection, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{SauerPaiMachine, S, A, TG, P}}, AbstractVector}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.initialize_mach_shaft!","text":"Initialitation of model of 6-state (SauerPai) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.initialize_mach_shaft!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{Any, StaticInjection, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{SimpleAFMachine, S, A, TG, P}}, AbstractVector}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.initialize_mach_shaft!","text":"Initialitation of model of 4-state (Simple Anderson-Fouad) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.initialize_mach_shaft!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{Any, StaticInjection, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{SimpleMarconatoMachine, S, A, TG, P}}, AbstractVector}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.initialize_mach_shaft!","text":"Initialitation of model of 4-state (Simple Marconato) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.low_pass_modified_mass_matrix-Union{Tuple{Z}, Tuple{W}, Tuple{V}, Tuple{Z, V, Float64, W, Float64}} where {V<:Union{Float64, ForwardDiff.Dual}, W<:Union{Float64, ForwardDiff.Dual}, Z<:Union{Float64, ForwardDiff.Dual}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.low_pass_modified_mass_matrix","text":"Low Pass Filter Modified ┌─────────────┐ │ K │ u -> │ ────────────│ -> y │ K_den + sT │ └─────────────┘\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.mass_matrix_entries-Tuple{DynamicInjection}","page":"Internal API Reference","title":"PowerSimulationsDynamics.mass_matrix_entries","text":"Default implementation of mass matrix entries. Keeps the default values in the identity matrix\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.mdl_machine_ode!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{AndersonFouadMachine, S, A, TG, P}}, Any, Any}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.mdl_machine_ode!","text":"Model of 6-state (AndersonFouadMachine) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.mdl_machine_ode!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{BaseMachine, S, A, TG, P}}, Any, Any}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.mdl_machine_ode!","text":"Model of 0-state synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.mdl_machine_ode!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{MarconatoMachine, S, A, TG, P}}, Any, Any}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.mdl_machine_ode!","text":"Model of 6-state (MarconatoMachine) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.mdl_machine_ode!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{OneDOneQMachine, S, A, TG, P}}, Any, Any}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.mdl_machine_ode!","text":"Model of 2-state (One d- and One q-) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.mdl_machine_ode!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{SauerPaiMachine, S, A, TG, P}}, Any, Any}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.mdl_machine_ode!","text":"Model of 6-state (SauerPaiMachine) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.mdl_machine_ode!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{SimpleAFMachine, S, A, TG, P}}, Any, Any}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.mdl_machine_ode!","text":"Model of 4-state (SimpleAFMachine) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.mdl_machine_ode!-Union{Tuple{P}, Tuple{TG}, Tuple{A}, Tuple{S}, Tuple{AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, AbstractArray{<:Union{Float64, ForwardDiff.Dual}}, PowerSimulationsDynamics.DynamicWrapper{DynamicGenerator{SimpleMarconatoMachine, S, A, TG, P}}, Any, Any}} where {S<:Shaft, A<:AVR, TG<:TurbineGov, P<:PSS}","page":"Internal API Reference","title":"PowerSimulationsDynamics.mdl_machine_ode!","text":"Model of 4-state (SimpleMarconatoMachine) synchronous machine in Julia. Refer to Power System Modelling and Scripting by F. Milano for the equations\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.mdl_zip_load!-Union{Tuple{T}, Tuple{T, T, AbstractArray{T}, AbstractArray{T}, PowerSimulationsDynamics.StaticLoadWrapper}} where T<:Union{Float64, ForwardDiff.Dual}","page":"Internal API Reference","title":"PowerSimulationsDynamics.mdl_zip_load!","text":"Model for ZIP Load model given by:\n\nPzip = Ppower + Pcurrent * (V / V0) + Pimpedance * (V / V0)^2 Qzip = Qpower + Qcurrent * (V / V0) + Qimpedance * (V / V0)^2\n\nwith V = sqrt(Vr^2 + Vi^2) and V0 the voltage magnitude from the power flow solution\n\nThe current taken for the load is computed as: Izip = (Pzip + j Qzip)^* / (Vr + j Vi)^* Izip = (Pzip - j Qzip) / (Vr - j Vi)\n\nFor constant impedance it is obtained: Izre = (1 / V0)^2 * (Vr * Pimpedance + Vi * Qimpedance) Izim = (1 / V0)^2 * (Vi * Pimpedance - Vr * Qimpedance)\n\nFor constant current it is obtained: Iire = (1 / V0) * ( (Vr * Pcurrent + Vi * Qcurrent) / V ) Iiim = (1 / V0) * ( (Vi * Pcurrent - Vr * Qcurrent) / V )\n\nFor constant power it is obtained: Ipre = (Vr * Ppower + Vi * Qpower) / V^2 Ipim = (Vi * Ppower - Vr * Qpower) / V^2\n\nModel for Exponential Load model given by:\n\nPexp = P0 * (V / V0)^α Qexp = Q0 * (V / V0)^β\n\nThe current taken for the load is computed as: Iexp = (Pexp + j Qexp)^* / (Vr + j Vi)^* Iexp = (Pexp - j Qexp) / (Vr - j Vi)\n\nIt results: Irexp = Vr * P0 * (V^(α - 2) / V0^α) + Vi * Q0 * (V^(β - 2)/ V0^β) Iiim = Vi * P0 * (V^(α - 2) / V0^α) - Vr * Q0 * (V^(β - 2)/ V0^β)\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_activepower_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_activepower_series","text":"Function to compute the active power output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_branch_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_branch_series","text":"Function to compute the current flowing through an AC branch through their series element. The current is computed through the from bus into the to bus.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_field_current_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_field_current_series","text":"Function to compute the field current output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_field_voltage_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_field_voltage_series","text":"Function to compute the field voltage output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_frequency_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_frequency_series","text":"Function to compute the frequency of a Dynamic Injection component.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_imaginary_current_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_imaginary_current_series","text":"Function to compute the imaginary current output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_mechanical_torque_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_mechanical_torque_series","text":"Function to compute the mechanical torque output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_pss_output_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_pss_output_series","text":"Function to compute the pss output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_reactivepower_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_reactivepower_series","text":"Function to compute the active power output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_real_current_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_real_current_series","text":"Function to compute the real current output time series of a Dynamic Injection series out of the DAE Solution. It receives the solution and the string name of the Dynamic Injection device.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_source_voltage_current_series","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_source_voltage_current_series","text":"Function to obtain voltage and output currents for a source. It receives the simulation resutls and an optional argument of the time step of the results.\n\n\n\n\n\n","category":"function"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_state_series-Tuple{SimulationResults, Tuple{String, Symbol}, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_state_series","text":"Function to obtain the state time series of a specific state. It receives the simulation, and a tuple containing the name of the Dynamic Device and the symbol of the state.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_voltage_current_series-Tuple{SimulationResults, String, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_voltage_current_series","text":"Function to obtain voltage and output currents for a dynamic device. It receives the simulation, and the name of the Dynamic Device.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.post_proc_voltage_series-Tuple{Any, Int64, Int64, Union{Nothing, Float64, Vector{Float64}}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.post_proc_voltage_series","text":"Function to obtain voltage using the bus index (and not the bus number). It receives the solution, the bus index and the total number of buses.\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.saturation_function-Tuple{Union{RoundRotorExponential, SalientPoleExponential}, Union{Float64, ForwardDiff.Dual}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.saturation_function","text":"Saturation function for exponential saturation models for machines\n Se(x) = B * x^A\n\n\n\n\n\n","category":"method"},{"location":"api/internal/#PowerSimulationsDynamics.saturation_function-Tuple{Union{RoundRotorQuadratic, SalientPoleQuadratic}, Union{Float64, ForwardDiff.Dual}}","page":"Internal API Reference","title":"PowerSimulationsDynamics.saturation_function","text":"Saturation function for quadratic saturation models for machines\n Se(x) = B * (x - A)^2 / x\n\n\n\n\n\n","category":"method"},{"location":"component_models/converter/#Converter","page":"Converter","title":"Converter","text":"","category":"section"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"This component can be used to model the dynamics of the switching process.","category":"page"},{"location":"component_models/converter/#Average-Model-[AverageConverter]","page":"Converter","title":"Average Model [AverageConverter]","text":"","category":"section"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"The average model outputs the desired reference signal since:","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"beginalign\nv_d^textcv approx m_d v_textdc approx fracv_d^textref-signalv_textdc v_textdc approx v_d^textref-signal tag1a \nv_q^textcv approx m_q v_textdc approx fracv_q^textref-signalv_textdc v_textdc approx v_q^textref-signal tag1b\nendalign","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"where m_dq is the modulation signal, and v_dq^textref-signal is the voltage reference signal from the inner loop control.","category":"page"},{"location":"component_models/converter/#Generic-Renewable-Converter-Type-A-[RenewableEnergyConverterTypeA]","page":"Converter","title":"Generic Renewable Converter Type A ```[RenewableEnergyConverterTypeA]","text":"","category":"section"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"This block represents the REGCA model. The equations (without the limiters) are:","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"beginalign\n dotI_p = frac1T_g (I_textpcmd - I_p) tag2a \n dotI_q = frac1T_g (I_textqcmd - I_q) tag2b \n dotV_textmeas = frac1T_fltr (V_t - V_textmeas tag2c)\nendalign","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"on which I_textpcmd and I_textqcmd are the current commands from the inner control and V_t is the bus voltage magnitude. The additional terms and output current are computed as:","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"beginalign\n I_q^textcv = -I_q - I_textqextra tag2d \n I_textqextra = max(K_hv (V_t - V_textolim)) tag2e \n I_p^textcv = G_lv I_p tag2f \nendalign","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"on which G_lv is the gain used for Low Voltage Active Current Management and I_textqextra is the additional current for High Voltage Reactive Current Management.","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"It is important to note that both current commands coming from the inner control were obtained by dividing the active (or reactive) power by the magnitude voltage instead of using the correct phasor formula I = (SV)^*. For that purpose, a correction factor must be applied to obtain the correct output currents in the network reference frame:","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"beginalign*\n I_r + jI_i = (I_p + jI_q) cdot V_t cdot frac1V_r + jV_i \n = (I_p + jI_q) cdot fracV_tV_t e^jtheta \n = (I_p + jI_q) cdot e^-jtheta\nendalign*","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"This correction factor looks like a reference transformation that must be used to properly inject current into the grid. With that the output current is computed as:","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"beginalign\n I_r = I_p^textcv cos(theta) - I_q^textcv sin(theta) tag2g \n I_i = I_p^textcv sin(theta) + I_q^textcv cos(theta) tag2h\nendalign","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"This current source is usually modeled as a Norton equivalent using a parallel impedance with values R_sorce and X_sorce provided in the .raw file. If an RL filter is used, a Voltage Source behind that RL filter (i.e. the converter output voltage) can be computed as:","category":"page"},{"location":"component_models/converter/","page":"Converter","title":"Converter","text":"beginalign*\n Z_f = r_f + jl_f \n Z_sorce = R_sorce + jX_sorce \n I_cv = I_r + jI_i \n v_r^textcv + jv_i^textcv = fracI_cv + fracv^textgridZ_ffrac1Z_sorce + frac1Z_f tag2i\nendalign*","category":"page"},{"location":"#PowerSimulationsDynamics.jl","page":"Welcome Page","title":"PowerSimulationsDynamics.jl","text":"","category":"section"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"CurrentModule = PowerSimulationsDynamics","category":"page"},{"location":"#Overview","page":"Welcome Page","title":"Overview","text":"","category":"section"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"PowerSimulationsDynamics.jl is a Julia package for doing Power Systems Dynamic Modeling with Low Inertia Energy Sources.","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"The synchronous machine components supported here are based on commercial models and the academic components are derived from Power System Modelling and Scripting.","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"Inverter models support both commercial models, such as REPC, REEC and REGC type of models; and academic models obtained from grid-following and grid-forming literature such as in \"A Virtual Synchronous Machine implementation for distributed control of power converters in SmartGrids\"","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"The background work on PowerSimulationsDynamics.jl is explained in Revisiting Power Systems Time-domain Simulation Methods and Models","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"@article{lara2023revisiting,\ntitle={Revisiting Power Systems Time-domain Simulation Methods and Models},\nauthor={Lara, Jose Daniel and Henriquez-Auba, Rodrigo and Ramasubramanian, Deepak and Dhople, Sairaj and Callaway, Duncan S and Sanders, Seth},\njournal={arXiv preprint arXiv:2301.10043},\nyear={2023}\n}","category":"page"},{"location":"#Installation","page":"Welcome Page","title":"Installation","text":"","category":"section"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"The latest stable release of PowerSimulationsDynamics.jl can be installed using the Julia package manager with","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"] add PowerSimulationsDynamics","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"For the current development version, \"checkout\" this package with","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"] add PowerSimulationsDynamics#master","category":"page"},{"location":"#Structure","page":"Welcome Page","title":"Structure","text":"","category":"section"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"The following figure shows the interactions between PowerSimulationsDynamics.jl, PowerSystems.jl, ForwardDiff.jl, DiffEqBase.jl and the integrators. The architecture of PowerSimulationsDynamics.jl is such that the power system models are all self-contained and return the model function evaluations. The Jacobian is calculated using automatic differentiation through ForwardDiff.jl, that is used for both numerical integration and small signal analysis. Considering that the resulting models are differential-algebraic equations (DAE), the implementation focuses on the use of implicit solvers, in particular BDF and Rosenbrock methods.","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":" ","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"⠀","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"PowerSimulationsDynamics.jl has been developed as part of the Scalable Integrated Infrastructure Planning (SIIP) initiative at the U.S. Department of Energy's National Renewable Energy Laboratory (NREL)","category":"page"},{"location":"generic/#Industrial-(Generic)-Renewable-Models","page":"Industrial Renewable Models","title":"Industrial (Generic) Renewable Models","text":"","category":"section"},{"location":"generic/#Connection-with-the-Inverter-Metamodel","page":"Industrial Renewable Models","title":"Connection with the Inverter Metamodel","text":"","category":"section"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"Generic Renewable Models for PV solar or battery devices used in industrial tools, such as PSS/E or PowerWorld, does not necessary resemble the proposed structure of our proposed metamodel. ","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"In general terms, a generic renewable model (for PV plant or battery) is typically a Grid Following inverter that uses a Renewable Energy Plant Controller (REPC), a Renewable Energy Electrical Controller (REEC) and a Renewable Energy Generic Converter (REGC) model. The following figure is useful to understand the general structure of such models:","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"
","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"⠀","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"","category":"page"},{"location":"","page":"Welcome Page","title":"Welcome Page","text":"PowerSimulationsDynamics.jl has been developed as part of the Scalable Integrated Infrastructure Planning (SIIP) initiative at the U.S. Department of Energy's National Renewable Energy Laboratory (NREL)","category":"page"},{"location":"generic/#Industrial-(Generic)-Renewable-Models","page":"Industrial Renewable Models","title":"Industrial (Generic) Renewable Models","text":"","category":"section"},{"location":"generic/#Connection-with-the-Inverter-Metamodel","page":"Industrial Renewable Models","title":"Connection with the Inverter Metamodel","text":"","category":"section"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"Generic Renewable Models for PV solar or battery devices used in industrial tools, such as PSS/E or PowerWorld, does not necessary resemble the proposed structure of our proposed metamodel. ","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"In general terms, a generic renewable model (for PV plant or battery) is typically a Grid Following inverter that uses a Renewable Energy Plant Controller (REPC), a Renewable Energy Electrical Controller (REEC) and a Renewable Energy Generic Converter (REGC) model. The following figure is useful to understand the general structure of such models:","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":" ","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"In comparison to the proposed inverter metamodel it is clear that the REPC resembles the Outer Control. However, the REEC has a purpose of both Outer Control and Inner Control and the REGC has a similar purpose of the Converter and Filter in the proposed structure. For such purpose, it was necessary to split the REEC and part of its model was included in both Outer Control and Inner Control.","category":"page"},{"location":"generic/#Example-of-implementation-of-generic-models","page":"Industrial Renewable Models","title":"Example of implementation of generic models","text":"","category":"section"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"The following includes examples of the implementation of the proposed model in the inverter metamodel.","category":"page"},{"location":"generic/#Active-Renewable-Outer-Control","page":"Industrial Renewable Models","title":"Active Renewable Outer Control","text":"","category":"section"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"The following example join the active power controllers from REPCA and REECB as ActiveRenewableControllerAB in PowerSimulationsDynamics.jl","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"
","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"In comparison to the proposed inverter metamodel it is clear that the REPC resembles the Outer Control. However, the REEC has a purpose of both Outer Control and Inner Control and the REGC has a similar purpose of the Converter and Filter in the proposed structure. For such purpose, it was necessary to split the REEC and part of its model was included in both Outer Control and Inner Control.","category":"page"},{"location":"generic/#Example-of-implementation-of-generic-models","page":"Industrial Renewable Models","title":"Example of implementation of generic models","text":"","category":"section"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"The following includes examples of the implementation of the proposed model in the inverter metamodel.","category":"page"},{"location":"generic/#Active-Renewable-Outer-Control","page":"Industrial Renewable Models","title":"Active Renewable Outer Control","text":"","category":"section"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"The following example join the active power controllers from REPCA and REECB as ActiveRenewableControllerAB in PowerSimulationsDynamics.jl","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":" ","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"⠀","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"An important thing to consider with the industrial models, is that the change of Flags can significantly vary the model and purpose of the controller.","category":"page"},{"location":"generic/#Reactive-Renewable-Outer-Control","page":"Industrial Renewable Models","title":"Reactive Renewable Outer Control","text":"","category":"section"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"Similar to the active controller, the following figure presents the reactive controller part from REPCA and REECB as ReactiveRenewableControllerAB in PowerSimulationsDynamics.jl","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"
","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"⠀","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"An important thing to consider with the industrial models, is that the change of Flags can significantly vary the model and purpose of the controller.","category":"page"},{"location":"generic/#Reactive-Renewable-Outer-Control","page":"Industrial Renewable Models","title":"Reactive Renewable Outer Control","text":"","category":"section"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"Similar to the active controller, the following figure presents the reactive controller part from REPCA and REECB as ReactiveRenewableControllerAB in PowerSimulationsDynamics.jl","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":" ","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"⠀","category":"page"},{"location":"generic/#Inner-Controller","page":"Industrial Renewable Models","title":"Inner Controller","text":"","category":"section"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"Finally, the remaining part from REECB was included RECurrentControllerB","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"
","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"⠀","category":"page"},{"location":"generic/#Inner-Controller","page":"Industrial Renewable Models","title":"Inner Controller","text":"","category":"section"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"Finally, the remaining part from REECB was included RECurrentControllerB","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":" ","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"⠀","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"The REGCAmodel was directly included in a Converter Block, and the filter can be bypassed using an RLFilter block with rf = lf = 0.","category":"page"},{"location":"generic/#Current-availability-of-model-flags-in-PSID","page":"Industrial Renewable Models","title":"Current availability of model flags in PSID","text":"","category":"section"},{"location":"generic/#Active-Controller","page":"Industrial Renewable Models","title":"Active Controller","text":"","category":"section"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"For the active controller, both Freq_Flag = 0 (ignoring frequency regulation) and Freq_Flag = 1 (considering frequency regulation) are available.","category":"page"},{"location":"generic/#Reactive-Controller","page":"Industrial Renewable Models","title":"Reactive Controller","text":"","category":"section"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"The following table describes the current available combination of flags in PSID:","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"REF_Flag PF_Flag V_Flag Q_Flag\n0 0 0 0\n0 0 1 0\n1 0 1 1\n1 0 0 0","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"Any combination outside of these cases may not converge to a feasible operating point. Check the following CAISO report for the description and compliance of each flag combination.","category":"page"}]
+}
diff --git a/previews/PR385/siteinfo.js b/previews/PR385/siteinfo.js
new file mode 100644
index 000000000..93df92660
--- /dev/null
+++ b/previews/PR385/siteinfo.js
@@ -0,0 +1 @@
+var DOCUMENTER_CURRENT_VERSION = "previews/PR385";
diff --git a/previews/PR385/small/index.html b/previews/PR385/small/index.html
new file mode 100644
index 000000000..860d8663b
--- /dev/null
+++ b/previews/PR385/small/index.html
@@ -0,0 +1,32 @@
+
+
","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"⠀","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"The REGCAmodel was directly included in a Converter Block, and the filter can be bypassed using an RLFilter block with rf = lf = 0.","category":"page"},{"location":"generic/#Current-availability-of-model-flags-in-PSID","page":"Industrial Renewable Models","title":"Current availability of model flags in PSID","text":"","category":"section"},{"location":"generic/#Active-Controller","page":"Industrial Renewable Models","title":"Active Controller","text":"","category":"section"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"For the active controller, both Freq_Flag = 0 (ignoring frequency regulation) and Freq_Flag = 1 (considering frequency regulation) are available.","category":"page"},{"location":"generic/#Reactive-Controller","page":"Industrial Renewable Models","title":"Reactive Controller","text":"","category":"section"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"The following table describes the current available combination of flags in PSID:","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"REF_Flag PF_Flag V_Flag Q_Flag\n0 0 0 0\n0 0 1 0\n1 0 1 1\n1 0 0 0","category":"page"},{"location":"generic/","page":"Industrial Renewable Models","title":"Industrial Renewable Models","text":"Any combination outside of these cases may not converge to a feasible operating point. Check the following CAISO report for the description and compliance of each flag combination.","category":"page"}]
+}
diff --git a/previews/PR385/siteinfo.js b/previews/PR385/siteinfo.js
new file mode 100644
index 000000000..93df92660
--- /dev/null
+++ b/previews/PR385/siteinfo.js
@@ -0,0 +1 @@
+var DOCUMENTER_CURRENT_VERSION = "previews/PR385";
diff --git a/previews/PR385/small/index.html b/previews/PR385/small/index.html
new file mode 100644
index 000000000..860d8663b
--- /dev/null
+++ b/previews/PR385/small/index.html
@@ -0,0 +1,32 @@
+
+










