**这里的视觉里程计由ORB_SLAM2负责发布,以/bWmono/Odom话题发布。 1. 本机ssh准备部分(小强主机是受控端,本机是指远程控制端) ssh远程登录小强主机,下文的操作如果不加特殊声明则都是在这个ssh窗口中输入的
ssh [email protected]
请将xxx.xxx.xxx.xxx 换成小强当前实际的ip地址
启动多窗口管理器
screen
- screen的用法请参考这篇教程*
查看当前ros是否安装有orb_init这个package
rospack find orb_init
如果存在则将其删除
cd ~/Documents/ros/src
rm -r orb_init
从蓝鲸智能开源软件仓中重新下载最新版本orb_init,并安装
cd ~/Documents/ros/src
git clone https://github.com/BlueWhaleRobot/orb_init.git
安装完毕
查看startup 开机任务是否运行
sudo service startup status
如果显示runing,说明正常,如果显示stopped,则重新启动它
sudo service startup start
如果想关闭这个任务,可以使用这条指令
sudo service startup stop
查看系统状态
rostopic echo /system_monitor/report
如果正常,则显示如下
imageStatus: True
odomStatus: True
orbStartStatus: False
orbInitStatus: False
orbScaleStatus: False
brightness: 0
power: 12.34432
如果不正常请重启startup 开机任务
sudo service startup restart
在screen中另一个命令窗口启动ORB_SLAM
roslaunch ORB_SLAM2 map.launch
回到上一个screen窗口,等待ORB_SLAM启动完毕
rostopic echo /system_monitor/report
如果ORB_SLAM启动完毕则显示如下
orbStartStatus: True
2. 本机本地操作部分 *本机已安装机器人系统ros kinetic版本,电脑操作系统是ubuntu16.04
将本机加入小强的ros局域网,在本地开启一个命令行终端,在本地的hosts文件内添加小强的ip
sudo gedit /etc/hosts
添加
xxx.xxx.xxx.xxx xiaoqiang-desktop
保存退出
请将xxx.xxx.xxx.xxx 换成小强当前实际的ip地址
加入ros局域网
export ROS_MASTER_URI=http://xiaoqiang-desktop:11311
rostopic list
如果加入成功,命令行会输出小强主机上的topic,更多关于多台ros机器联机的设置教程请移步这里
下载rviz配置文件,这个配置文件也可直接从小强主机上的ORB_SLAM2包中拷贝,用于查看小强视觉系统输出的轨迹
在本地命令行终端中输入
rviz
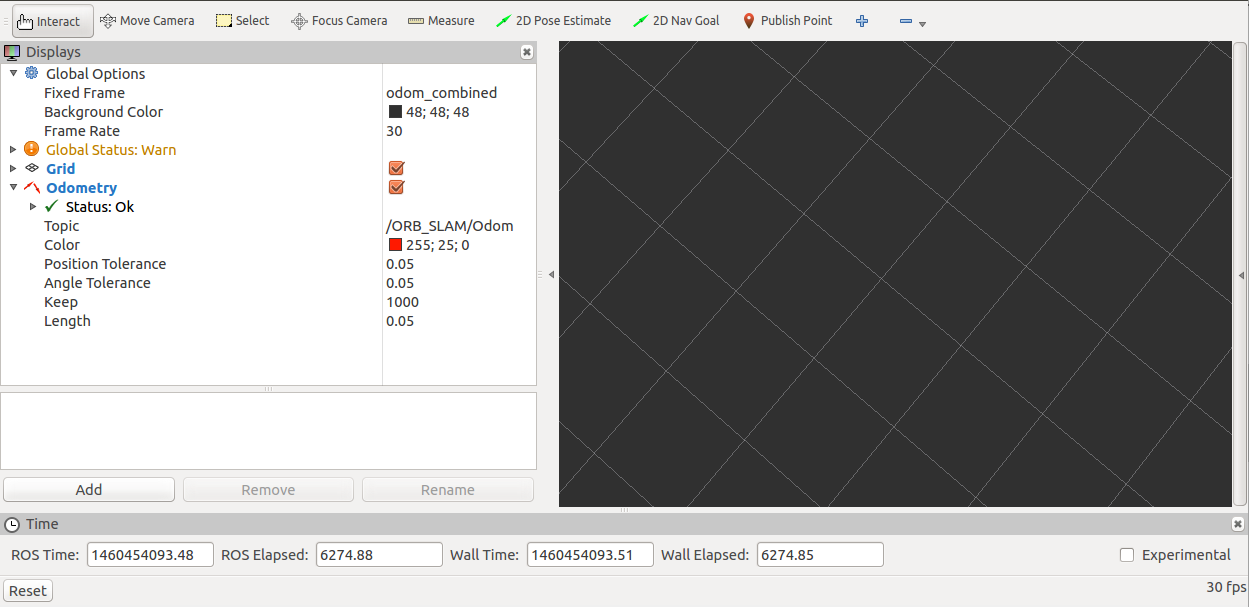
当窗口打开后,点击左上角的file->open,选择上述下载的配置文件。这时界面应该如下图显示
3. 在ssh中screen下新开一个窗口,用于控制小车移动
rosrun nav_test control.py
通过方向键来控制小强的移动。空格键是停止。Ctrl + C 退出程序。 遥控小车前进一小段距离,使orb_slam初始化完成,完成后orbInitStatus状态会显示为true
rostopic echo /system_monitor/report
如果正常,则显示如下
imageStatus: True
odomStatus: True
orbStartStatus: True
orbInitStatus: True
orbScaleStatus: False
brightness: 0
power: 12.34432
到此我们就已经获取小车的视觉里程计 4.随着小强的移动,本机上的rviz界面里就会实时更新显示出小车的轨迹,我们自己的测试视频在这 关于rviz的更多使用方法请移步这里