ssh [email protected]
cd Documents/ros/src/
下载两个ros软件包gmapping、openslam_gmapping
git clone https://github.com/BlueWhaleRobot/slam_gmapping.git
git clone https://github.com/BlueWhaleRobot/openslam_gmapping.git
cd ..
catkin_make
ssh [email protected]
如果是rplidar a1或者a2
roslaunch gmapping slam_gmapping_xiaoqiang_rplidar_a2.launch
# 如果是rplidar a3则启动
roslaunch gmapping slam_gmapping_xiaoqiang_rplidar_a3.launch
# 如果是星秒pavo激光雷达
roslaunch gmapping slam_gmapping_xiaoqiang_pavo.launch
# 如果是镭神ls01b激光雷达
roslaunch gmapping slam_gmapping_xiaoqiang_ls01b.launch
注意有些系统没法进行这样的操作,你可以直接把那个文件复制到本地,然后在从本地打开
export ROS_MASTER_URI=http://xiaoqiang-desktop:11311
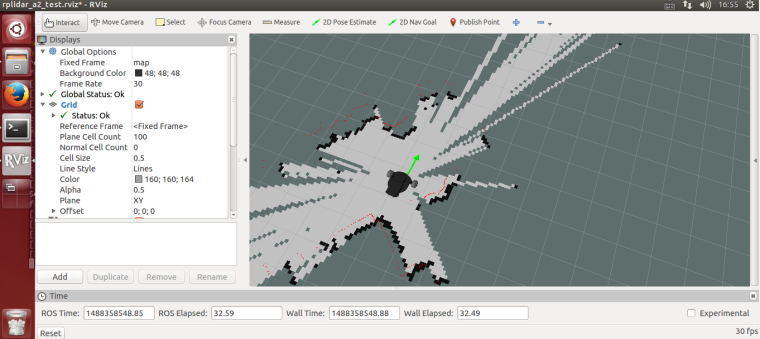
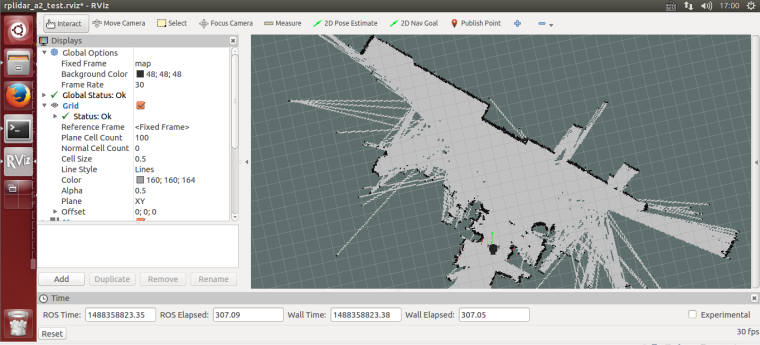
rviz
第一种方式,使用windows遥控端,参考这篇帖子(小强图传遥控windows客户端)
ssh [email protected]
rosrun nav_test control.py
第三种方式,使用手机app,参考这篇贴子(小强手机遥控app安卓版)
ssh [email protected]
rosrun map_server map_saver -f work0